浅谈Kmeans聚类
http://www.cnblogs.com/easymind223/archive/2012/10/30/2747178.html
聚类分析是一种静态数据分析方法,常被用于机器学习,模式识别,数据挖掘等领域。通常认为,聚类是一种无监督式的机器学习方法,它的过程是这样的:在未知样本类别的情况下,通过计算样本彼此间的距离(欧式距离,马式距离,汉明距离,余弦距离等)来估计样本所属类别。从结构性来划分,聚类方法分为自上而下和自下而上两种方法,前者的算法是先把所有样本视为一类,然后不断从这个大类中分离出小类,直到不能再分为止;后者则相反,首先所有样本自成一类,然后不断两两合并,直到最终形成几个大类。
常用的聚类方法主要有以下四种: //照搬的wiki,比较懒...
Connectivity based clustering (如hierarchical clustering 层次聚类法)
Centroid-based clustering (如kmeans)
Distribution-based clustering
Density-based clustering
Kmeans聚类是一种自下而上的聚类方法,它的优点是简单、速度快;缺点是聚类结果与初始中心的选择有关系,且必须提供聚类的数目。Kmeans的第二个缺点是致命的,因为在有些时候,我们不知道样本集将要聚成多少个类别,这种时候kmeans是不适合的,推荐使用hierarchical 或meanshift来聚类。第一个缺点可以通过多次聚类取最佳结果来解决。
Kmeans的计算过程大概表示如下
随机选择k个聚类中心. 最终的类别个数<= k
计算每个样本到各个中心的距离
每个样本聚类到离它最近的中心
重新计算每个新类的中心
重复以上步骤直到满足收敛要求。(通常就是中心点不再改变或满足一定迭代次数).
opencv1.0的例子, 随机生机的散点,每个点是一个二维样本
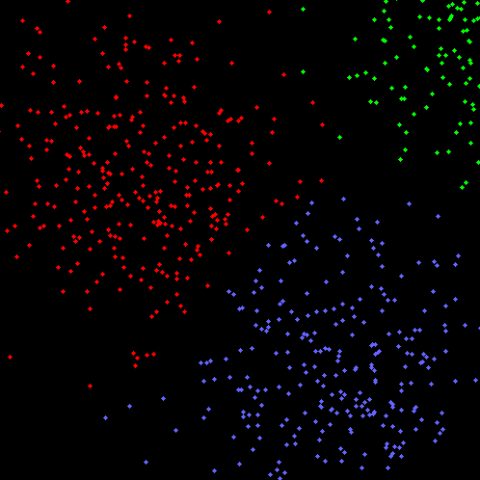

#include "cxcore.h" #include "highgui.h" #define MAX_CLUSTERS 5 int main( int argc, char** argv ) { CvScalar color_tab[MAX_CLUSTERS]; IplImage* img = cvCreateImage( cvSize( 500, 500 ), 8, 3 ); CvRNG rng = cvRNG(0xffffffff); color_tab[0] = CV_RGB(255,0,0); color_tab[1] = CV_RGB(0,255,0); color_tab[2] = CV_RGB(100,100,255); color_tab[3] = CV_RGB(255,0,255); color_tab[4] = CV_RGB(255,255,0); cvNamedWindow( "clusters", 1 ); for(;;) { int k, cluster_count = cvRandInt(&rng)%MAX_CLUSTERS + 1; int i, sample_count = cvRandInt(&rng)%1000 + 1; CvMat* points = cvCreateMat( sample_count, 1, CV_32FC2 ); CvMat* clusters = cvCreateMat( sample_count, 1, CV_32SC1 ); /* generate random sample from multigaussian distribution */ for( k = 0; k < cluster_count; k++ ) { CvPoint center; CvMat point_chunk; center.x = cvRandInt(&rng)%img->width; center.y = cvRandInt(&rng)%img->height; cvGetRows( points, &point_chunk, k*sample_count/cluster_count, k == cluster_count - 1 ? sample_count : (k+1)*sample_count/cluster_count ); cvRandArr( &rng, &point_chunk, CV_RAND_NORMAL, cvScalar(center.x,center.y,0,0), cvScalar(img->width/6, img->height/6,0,0) ); } /* shuffle samples */ for( i = 0; i < sample_count/2; i++ ) { CvPoint2D32f* pt1 = (CvPoint2D32f*)points->data.fl + cvRandInt(&rng)%sample_count; CvPoint2D32f* pt2 = (CvPoint2D32f*)points->data.fl + cvRandInt(&rng)%sample_count; CvPoint2D32f temp; CV_SWAP( *pt1, *pt2, temp ); } cvKMeans2( points, cluster_count, clusters, cvTermCriteria( CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 10, 1.0 )); cvZero( img ); for( i = 0; i < sample_count; i++ ) { CvPoint2D32f pt = ((CvPoint2D32f*)points->data.fl)[i]; int cluster_idx = clusters->data.i[i]; cvCircle( img, cvPointFrom32f(pt), 2, color_tab[cluster_idx], CV_FILLED ); } cvReleaseMat( &points ); cvReleaseMat( &clusters ); cvShowImage( "clusters", img ); int key = cvWaitKey(0); if( key == 27 ) // 'ESC' break; } }
opencv2.4的例子,对一张图片(377*280)的像素点进行聚类,每个像素点是一个五维样本(x,y,r,g,b),聚类结果如下
第一行: 原图; k=2, 用时t=72ms; k=3, t=93ms
第二行:k=4, t= 128ms; k=10, t=330ms; k=20, t=676ms






从图中某些局部可以看出,并不是k越大,细节就越显著(如后两幅图中向日葵的眼睛),这是因为kmean的初始位置是随机的。相同的样本每次聚类会有不同的结果
#include "stdafx.h" #include "opencv2/opencv.hpp" #include <iostream> #include <string> using namespace cv; using namespace std; //这是Kmeans算法的一个缺点,在聚类之前需要指定类别个数 const int nClusters = 20; int _tmain(int argc, _TCHAR* argv[]) { Mat src; //相当于IplImage // src = imread("fruit.jpg"); //只是另一张图 src = imread("zombie.jpg"); //cvLoadImage imshow("original", src); //cvShowImage blur(src, src, Size(11,11)); imshow("blurred", src); //p是特征矩阵,每行表示一个特征,每个特征对应src中每个像素点的(x,y,r,g,b共5维) Mat p = Mat::zeros(src.cols*src.rows, 5, CV_32F); //初始化全0矩阵 Mat bestLabels, centers, clustered; vector<Mat> bgr; cv::split(src, bgr); //分隔出src的三个通道 for(int i=0; i<src.cols*src.rows; i++) { p.at<float>(i,0) = (i/src.cols) / src.rows; // p.at<uchar>(y,x) 相当于 p->Imagedata[y *p->widthstep + x], p是8位uchar p.at<float>(i,1) = (i%src.cols) / src.cols; // p.at<float>(y,x) 相当于 p->Imagedata[y *p->widthstep + x], p是32位float p.at<float>(i,2) = bgr[0].data[i] / 255.0; p.at<float>(i,3) = bgr[1].data[i] / 255.0; p.at<float>(i,4) = bgr[2].data[i] / 255.0; } //计算时间 double t = (double)cvGetTickCount(); //kmeans聚类,每个样本的标签保存在bestLabels中 cv::kmeans(p, nClusters, bestLabels, TermCriteria( CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 10, 1.0), 3, KMEANS_PP_CENTERS, centers); t = (double)cvGetTickCount() - t; float timecost = t/(cvGetTickFrequency()*1000); //给每个类别赋颜色,其值等于每个类第一个元素的值 Vec3b colors[nClusters]; bool colormask[nClusters]; memset(colormask, 0, nClusters*sizeof(bool)); int count = 0; for(int i=0; i<src.cols*src.rows; i++) { int clusterindex = bestLabels.at<int>(i,0); for (int j=0; j<nClusters; j++) { if(j == clusterindex && colormask[j] == 0) { int y = i/src.cols; int x = i%src.cols; colors[j] = src.at<Vec3b>(y,x); colormask[j] = 1; count++; break; } } if(nClusters == count)break; } //显示聚类结果 clustered = Mat(src.rows, src.cols, CV_8UC3); for(int i=0; i<src.cols*src.rows; i++) { int y = i/src.cols; int x = i%src.cols; int clusterindex = bestLabels.at<int>(i,0); clustered.at<Vec3b>(y, x) = colors[clusterindex]; } imshow("clustered", clustered); cout<< "time cost = %gms\n"<<timecost ; //保存图像 stringstream s1,s2; s1<<timecost; s2<<nClusters; string name = "n=" + s2.str() + "_timecost=" + s1.str() + ".png"; imwrite(name, clustered); waitKey(); return 0; }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号