改进A融合动态局部算法仿真对比
局部动态规划简介
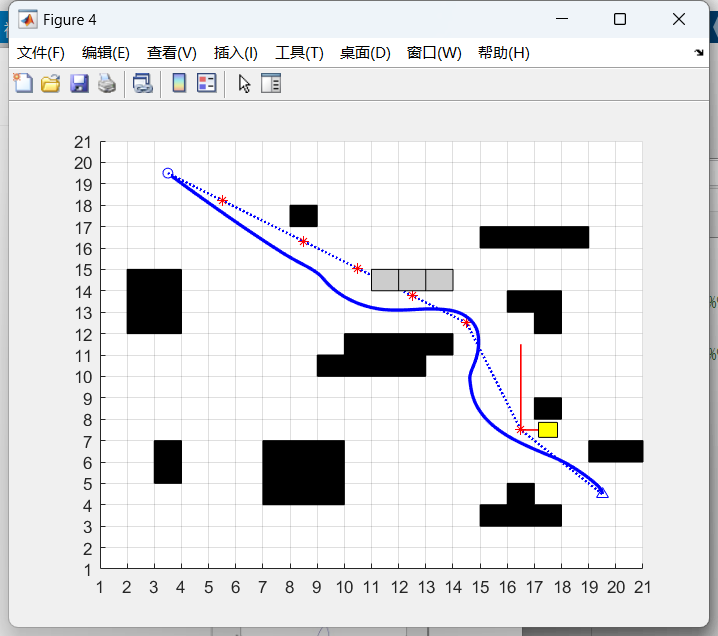
局部动态路径规划是指在动态环境下,移动机器人依据环境感知传感器(激光雷达、摄像头等)获得当前局部环境信息,实时规划一条避开障碍物规的移动路径。而在全局静态规划中,规划的路径是依据地图存储空间获得的环境信息规划出的一条无碰撞路径。在机器人依据静态规划的路径移动时,地图环境中可能出现未知障碍物占据规划路径的情况,如图4.3所示,其中点S为起始点,点G为目的地,黑色为已知的障碍物,灰色为未知障碍物,实线为全局规划路径。若继续按照全局规划的路径移动,则机器人与未知障碍物发生碰撞。因此,移动机器人结合全局点静态规划与局部动态规划才能准确的保证机器人安全到达目的地。
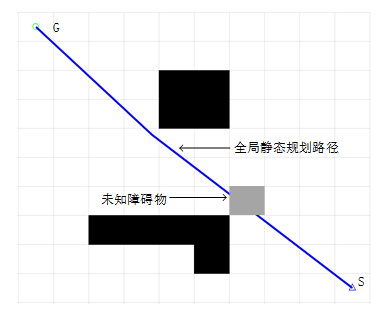
图4.3 未知障碍物占据全局路径图
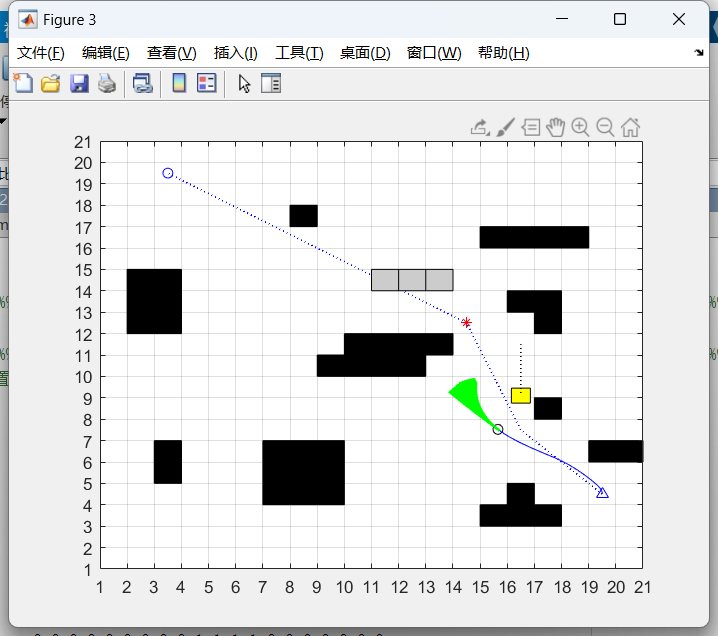
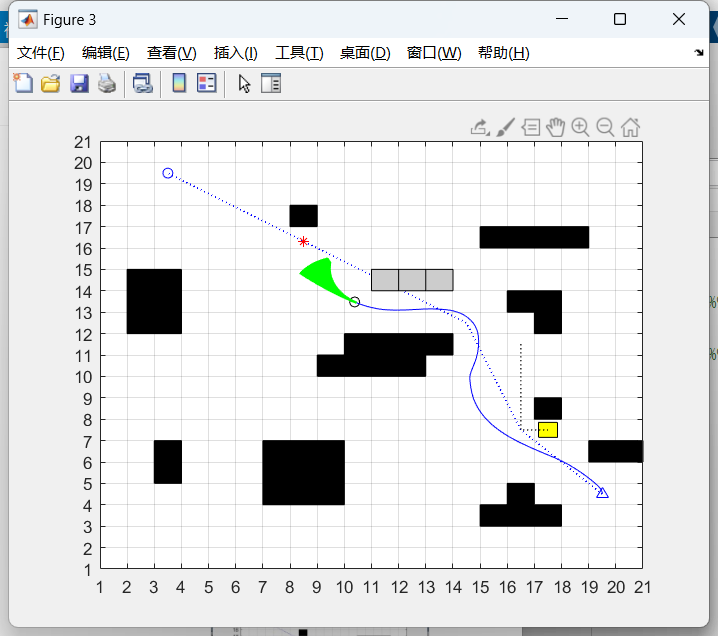
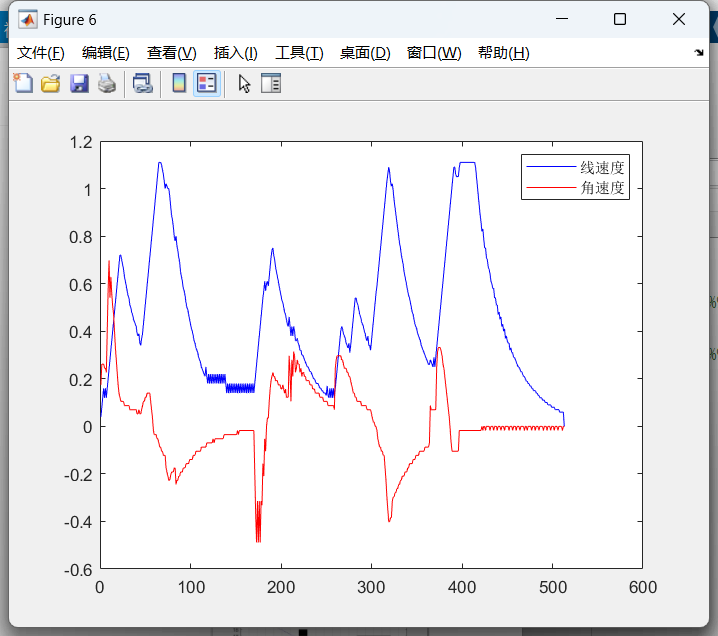
在移动机器人局部动态规划算法中,动态窗口算法(Dynamic Window Approach,DWA)是实时规划最优轨迹输出控制速度的局部动态规划算法,受速度条件的约束保证了运动速度命令的可行性及安全性。DWA主要原理是在速度约束条件下,生成多个速度组(线速度和角速度),模拟机器人在一定时间间隔内的移动轨迹。依据速度值、目的地位置及障碍物位置的约束下选择出生成最优轨迹的速度组,最后输出速度组进行控制移动。
历时 224.835469 秒。
路径长度
S =
24.1403

 浙公网安备 33010602011771号
浙公网安备 33010602011771号