halcon标定后改变世界坐标系参考点方法
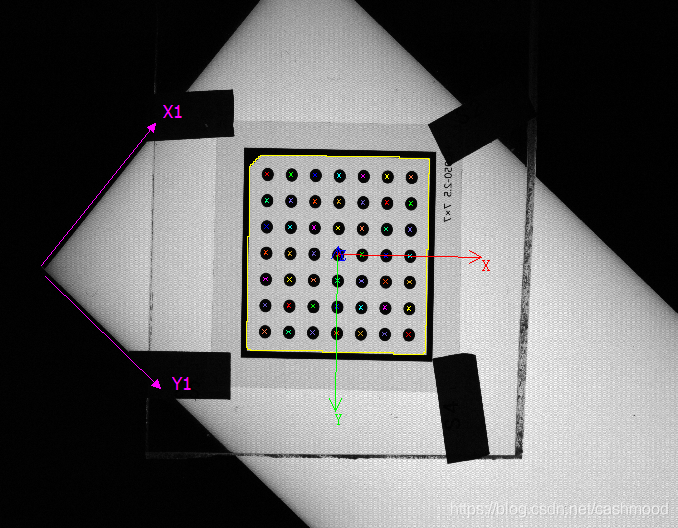
halcon相机标定完成后,世界坐标系原点在标定板的中间,如果要自定义坐标系原点该如何操作
如图:
方法1
使用仿射变换
*pose_to_hom_mat3d (FinalPose, HomMat3D)
*hom_mat3d_translate_local (HomMat3D, dx, dy, 0, HomMat3DTranslate)
*hom_mat3d_rotate_local (HomMat3DTranslate, rad(da), ‘z’, HomMat3DAdapted)
*hom_mat3d_to_pose (HomMat3DAdapted, PoseAdapted)
方法2
使用设置位置与角度
*tuple_replace (FinalPose, 5, PoseCalib[5]+da, NewPose)
*set_origin_pose (NewPose, dx, dy, 0, PoseAdapted)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号