
Coursera 机器学习 第5章 Neural Networks: Learning 学习笔记
5.1节 Cost Function
神经网络的代价函数。
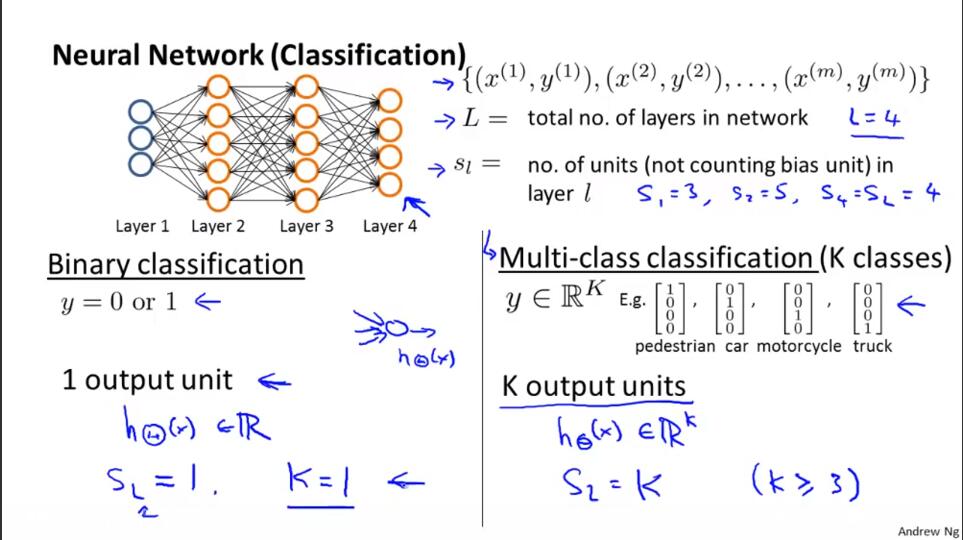
上图回顾神经网络中的一些概念:
L 神经网络的总层数。
sl 第l层的单元数量(不包括偏差单元)。
2类分类问题:二元分类和多元分类。
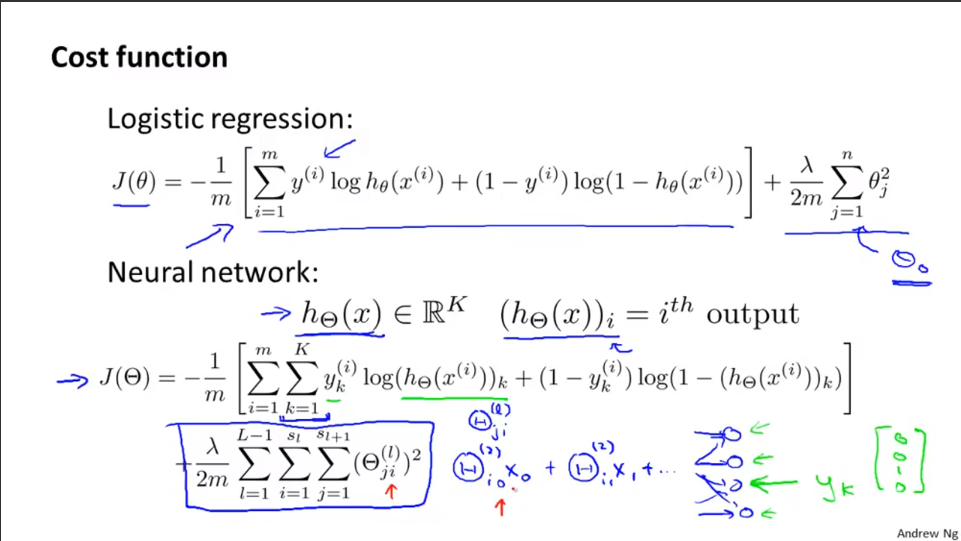
上图展现的是神经网络的损失函数,注意这是正则化的形式。
正则化部分,i、j不为0。当然i、j可以为0,此时的损失函数不会有太大的差异,只是当i、j不为0的形式更为常见。
5.2节 Backpropagation Algorithm
最小化损失函数的算法——反向传播算法:找到合适的参数是J(θ)最小。
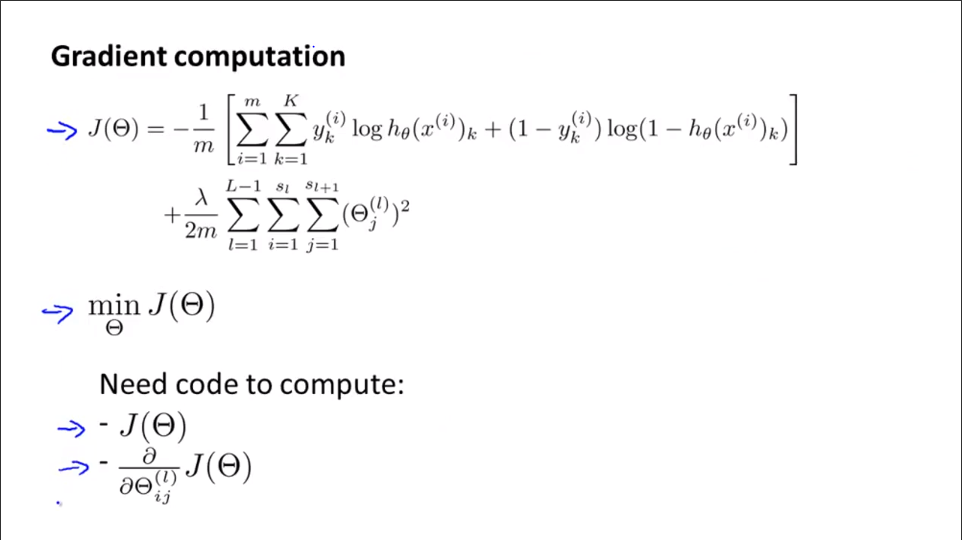
如上图。最小化损失函数可以使用梯度下降算法或者其他某种高级优化算法。但都需要先计算损失函数和每一项的偏导数。

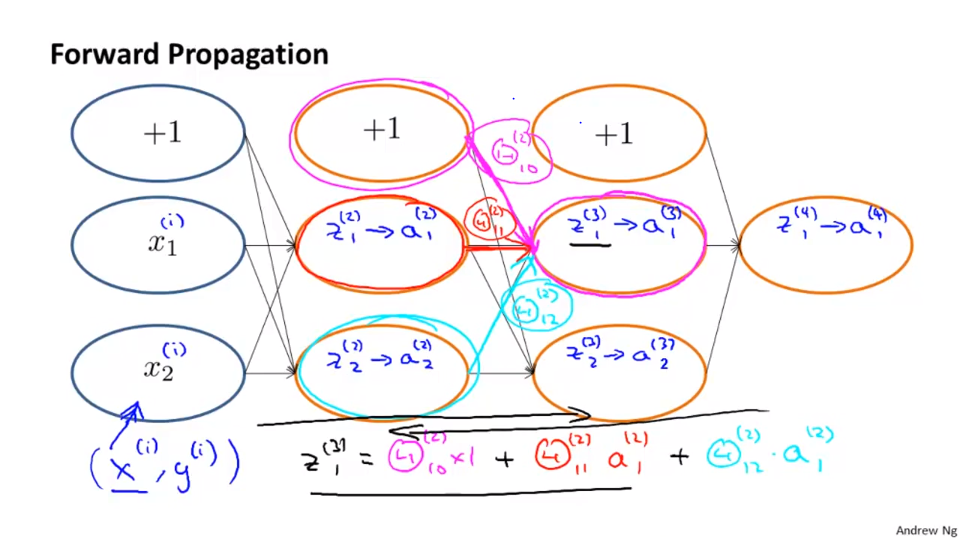
上图简单回顾前向传播。有4层的网络结构。
Θ(i) 第i层到第i+1层的权重
a(i) 第i层的激励值
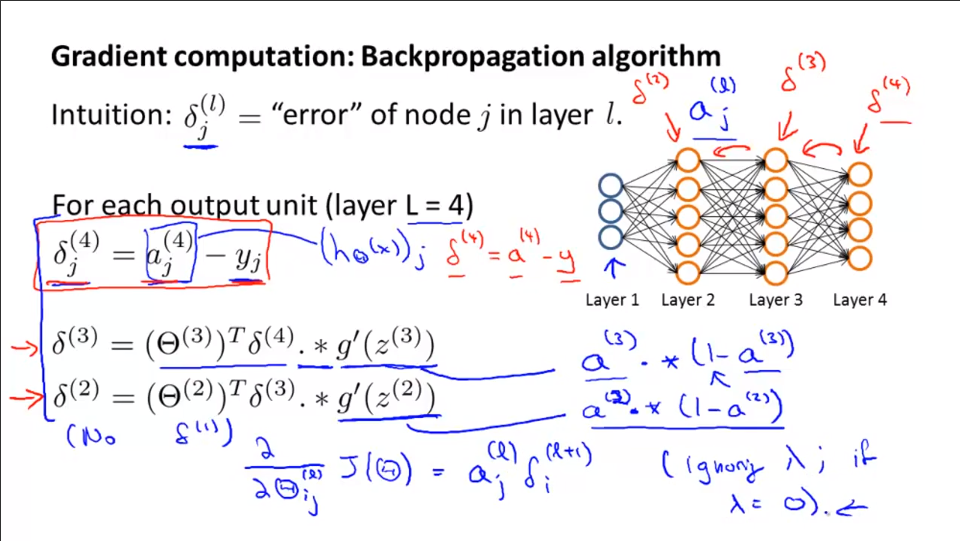
上图简单介绍反向传播算法(只有1个实例)。
1.δ(l)j的含义是第l层第j个神经元激励值的误差。
2.S型函数求导的结果:g'(z)=g(z)*(1-g(z))。写成向量形式就是图中的形式。
3.由后向前求误差。算法实现详细见图。
4.第1层没有误差项。
5.可以证明,忽视正则化部分(λ=0)时,Θ(l)ij关于J(Θ)的偏导数正好是a(l)j·δ(l+1)i。
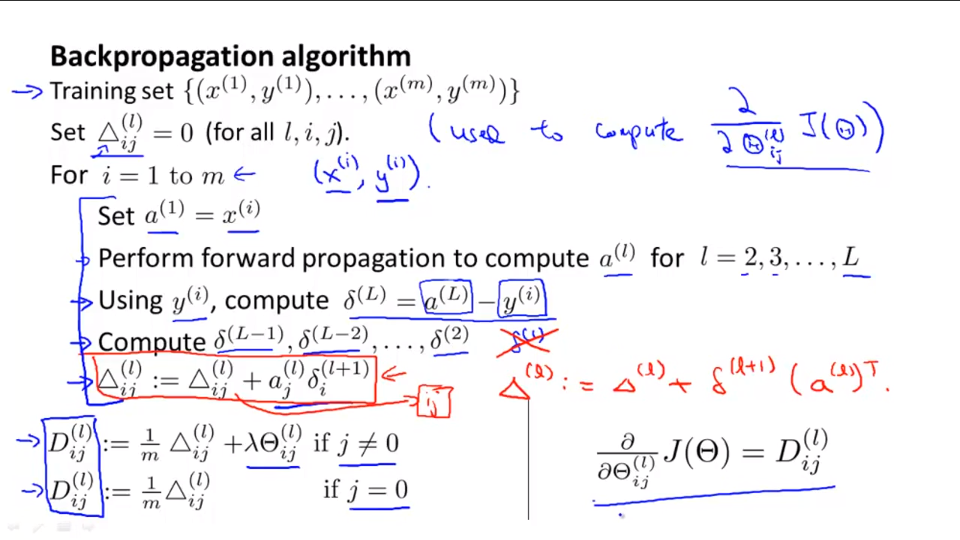
当有大量实例的时候,后向传播算法的实现如下。其实下面的过程实际主要是求解偏导数的过程:
有训练集{(x1,y1)...(xm,ym)},其中Δ(l)ij用来求J(Θ)对Θ(l)ij求偏导的结果。
for循环训练集中的每个样例。
每次循环中
1.a(1)=x(i),计算前向传播中a(l)值(l=2,3,...,L)
2.计算偏差项δ(L)=a(L)-y(i),然后依次计算δ(i)(i=L-1,...,2)
3.累加Δ(l)ij=Δ(l)ij+a(j)l·δ(l+1)j
循环退出后,D(l)ij表示是J(Θ)对Θ(l)ij求偏导的结果,注意区分j=0和j≠0的情况。
5.3节 Backpropagation Intuition
讨论反向传播的复杂步骤,理解这些步骤在做什么。
下面是前向传播的原理。比如,z(3)1=Θ(2)10*1+Θ(2)11*a(2)1+Θ(2)12*a(2)2。注意a(i)j=g(z(i)j)。
下图在只有一个输出单元的情况下讨论后向传播的式子。(图上的cost(i)打错)。比如,δ(2)2=Θ(2)12*δ(3)1+Θ(2)22*δ(3)2。
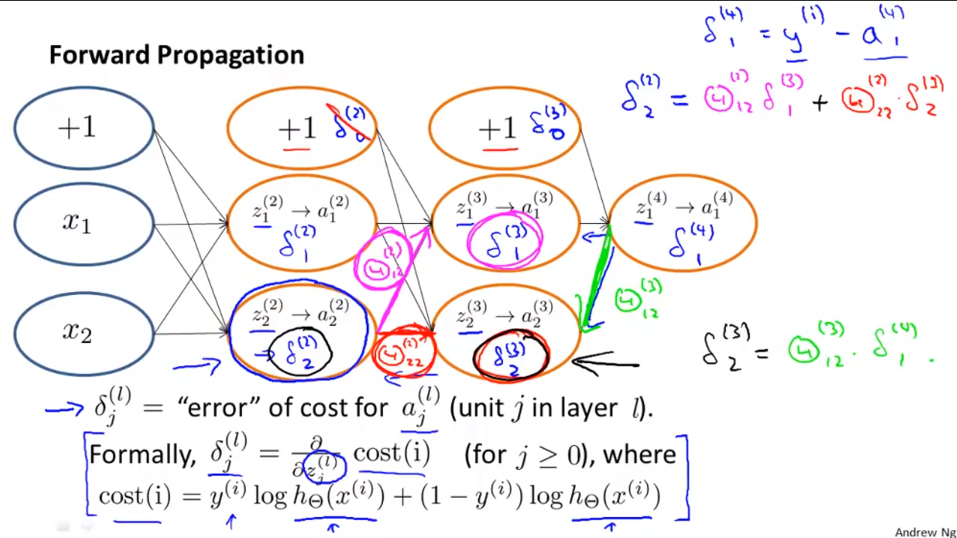
δ是损失函数的关于中间项z的偏微分(为什么?)。δ度量着我们对神经网络的权值做多少改变,对中间的计算量的影响是多少,从而对整个神经网络的输出h(x)的影响是多少,对整个代价值的影响多少。
偏差项对应的δ不是计算微分的必要部分,所以一般忽略。
5.4节 Implementation Note: Unrolling Parameters
上节课讨论了如何使用反向传播算法计算代价函数的导数。这节课介绍参数的矩阵形式和向量形式之间的转换的实现过程,怎样把参数从矩阵展开成向量,以便在高级的最优化步骤中使用。
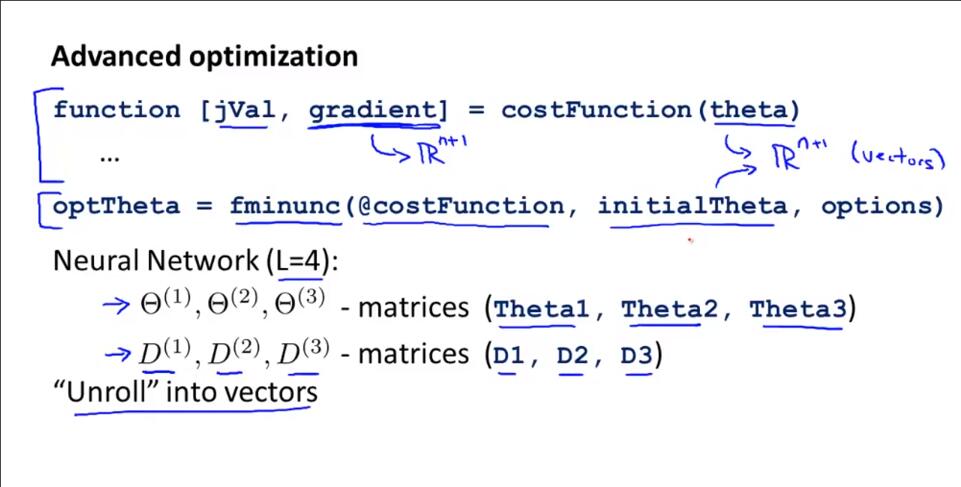
上图中,矩阵D是返回的梯度值gradient(损失函数关于特定参数Θ的偏导数)。
逻辑回归中,先写出损失函数的形式,然后调用高级的优化算法(这里是fminunc)。将损失函数、初始参数向量Θ(theta)、迭代要求作为参数输入,然后返回处理后的最优参数向量Θ。但是在神经网络中Θ是矩阵形式而不是向量形式,因此需要转换形式。
举个具体的例子:
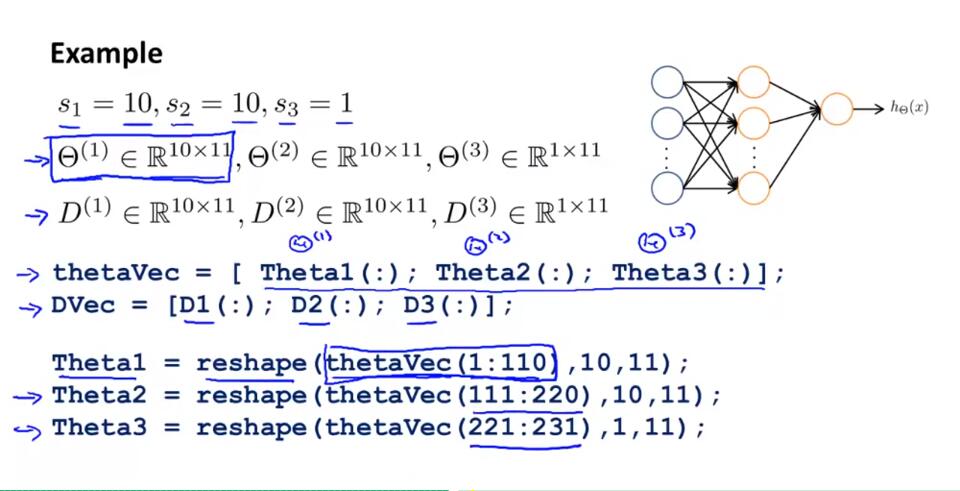
上图是一个4层的神经网络系统(图中画错)。
将矩阵形式的Theta参数展开成向量形式thetaVec:thetaVec=[Theta1(:);Theta2(:);Theta3(:)]
将向量形式的thetaVec的前1-110个元素恢复成矩阵形式10*11的Theta1:Theta1=reshape(thetaVec(1:110),10,11)
基本算法综述:
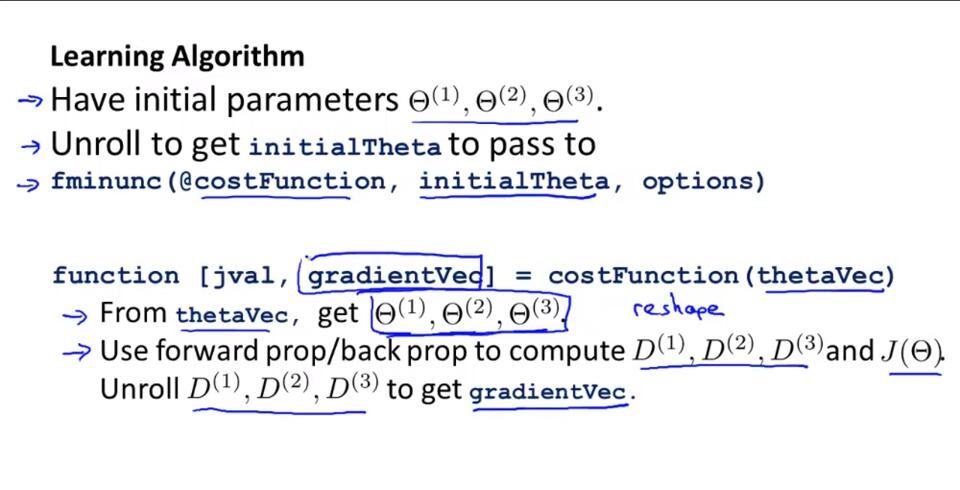
1.fminunc函数中,将初始权重矩阵参数Θ(1)、Θ(2)、Θ(2)展开成向量形式的initialTheta。将initialTheta作为形参传入fminunc函数。
2.代价函数中,向量形式的thetaVec转换为矩阵形式的Θ(1)、Θ(2)、Θ(2),利用前向/后向传播计算D(1)、D(2)、D(3)和J(Θ)。展开D(1)、D(2)、D(3)形成gradientVec返回。
矩阵形式的好处是在进行前向传播和反向传播的时候,会觉得更加方便,充分利用了向量化的实现过程。向量形式的好处是有像thetaVec或者DVec这样的矩阵,当你使用一下高级的优化算法的时候,这些算法通常要求所有参数要展开成一个长向量的形式。
5.5节 Gradient Checking
反向传播作为一个有很多细节的算法,在实现的时候会有点复杂。而且在实现反向传播的时候会遇到很多细小的错误,所以如果你把它和梯度下降法或者其他优化算法一起运行时,可能看起来它运行正常,并且你的代价函数J(Θ)最后在每次梯度下降法迭代时都会减小,但是可能你最后得到的神经网络误差比没有错误的要高,而且你很可能就是不知道是这些小错误导致的。
这里有个可以及时验证是否出错的方法:梯度检验。这个方法适用于比较复杂的模型,用于验证算法实现是否出错。
在这里,梯度检验:用来区别反向传播实现是否正确的方法。
先看导数的近似值的求解:
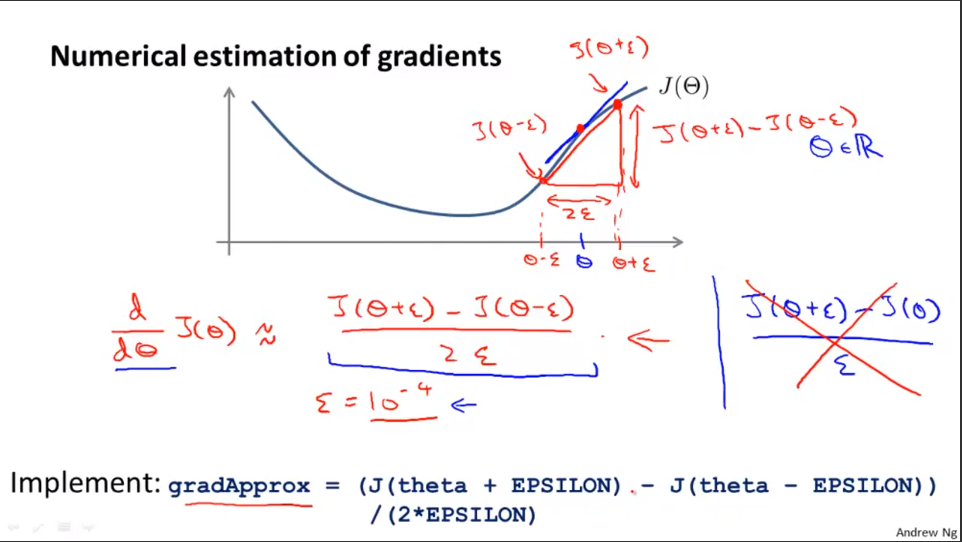
单侧差分和双侧差分,这里用双侧差分。
一个课后练习:
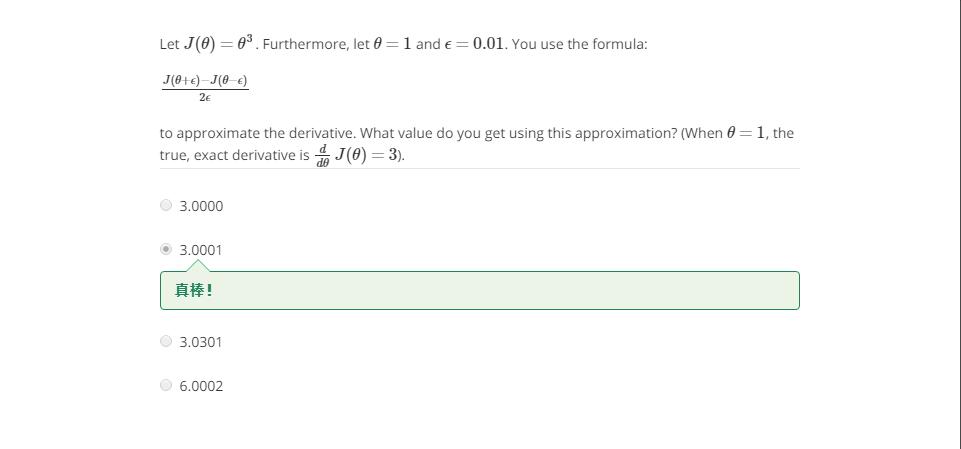
梯度检验的思想是计算偏导数的数值近似值向量gradApprox,然后和用便捷方法求出的DVec进行比较,如果结果差不多,之前的求解就是正确的。
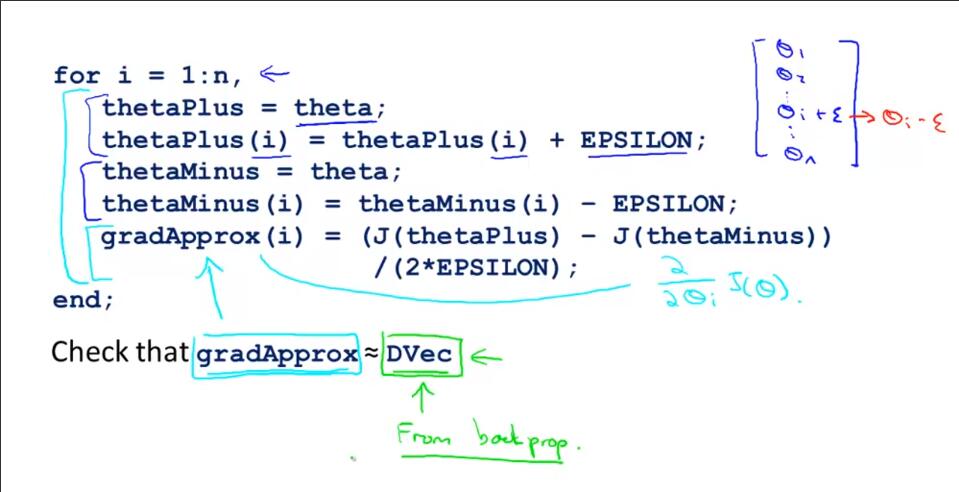
数学形式: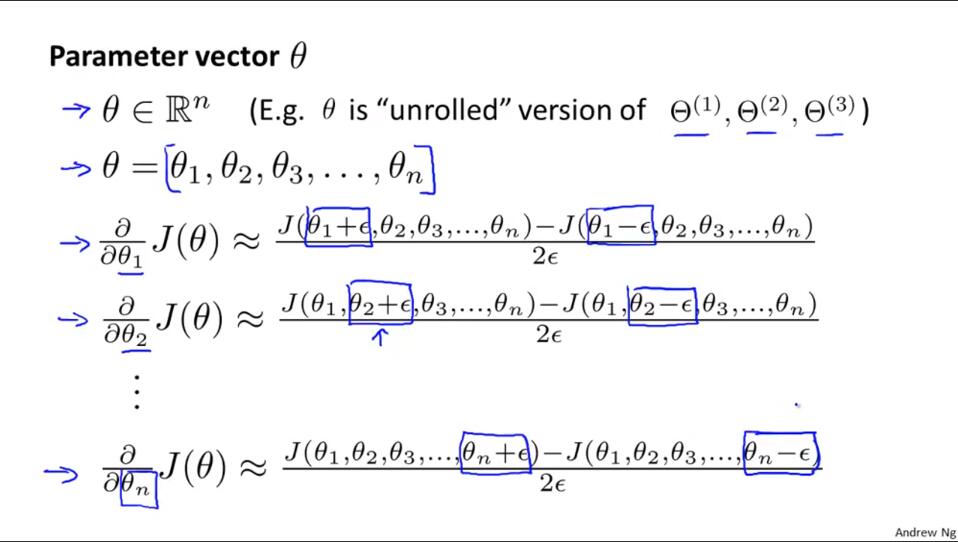
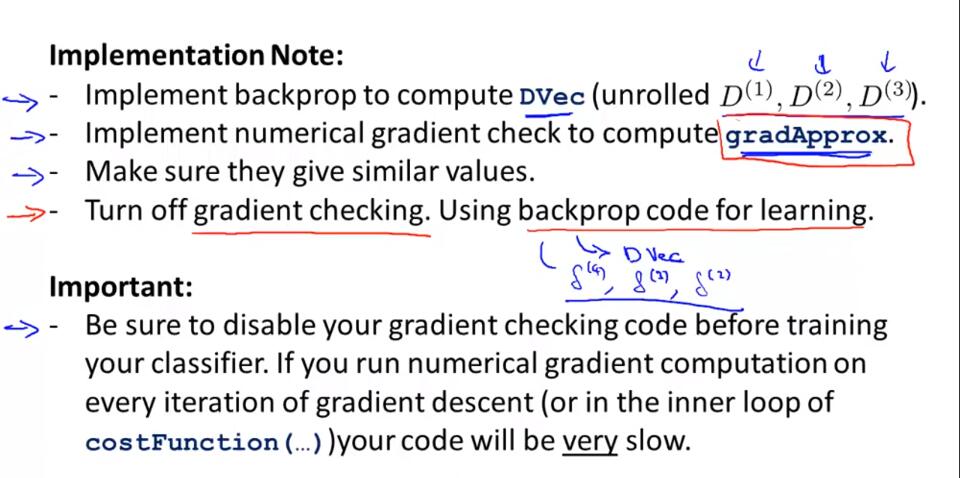
总结:
1.使用反向传播计算DVec。
2.利用梯度检验计算gradApprox。
3.比较DVec和gradApprox数值大小。
4.关闭梯度检验。将反向传播代码用于学习。
注意关掉梯度检验。因为梯度检验要比反向传播更慢。
5.6节 Random Initialization
这里要介绍随机初始化。
在逻辑回归中,设定theta初始值为0是可行的的,但是在神经网络中是不可行的。如果初始值相同,到最后所有的theta都相同,没有训练的意义。实际上,对于第l层,Θ(l)为矩阵,该矩阵所有权重初始值相同就会出现问题。这个问题也称为对称权重。
比如下图的例子:
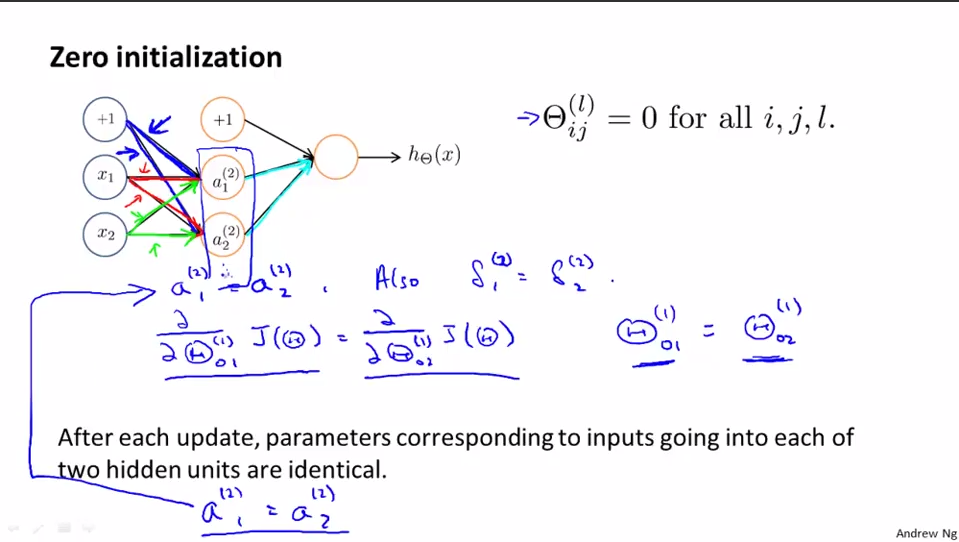
如果Θ(l)ij都初始化为同一个值,在图中可以看到,前向传播中,a(2)2=a(2)1;后向传播中,δ(2)1=δ(2)2,从而∂J(Θ)/∂(Θ(1)11)=∂J(Θ)/∂(Θ(1)21)。那么使用梯度下降时,Θ(1)11=Θ(1)11-α*∂J(Θ)/∂(Θ(1)11),Θ(1)21=Θ(1)21-α*∂J(Θ)/∂(Θ(1)21)。于是,最后Θ(1)11=Θ(1)21。同理,Θ(1)10=Θ(1)20,Θ(1)12=Θ(1)22。也就是说,经过梯度下降算法后,仍然有a(2)2=a(2)1,就好像第一层隐藏层所有单元都在计算相同的特征,所有的隐藏单元都在计算相同的输入函数,最后输出层每个单元输出值相同。所以,初始化参数Θ时,对第l层的权重矩阵Θ(l),不能将Θ(l)ij元素都初始为同一值。
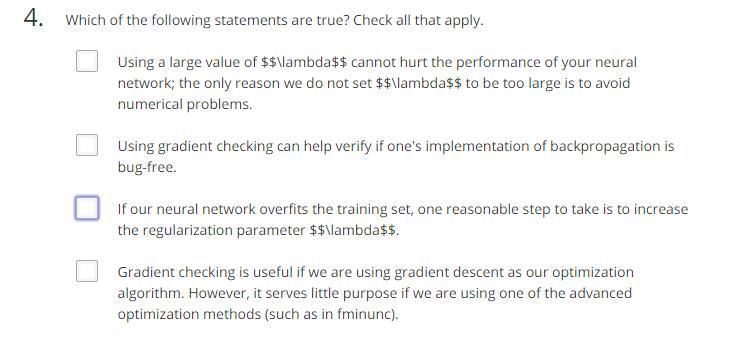
这里做题:
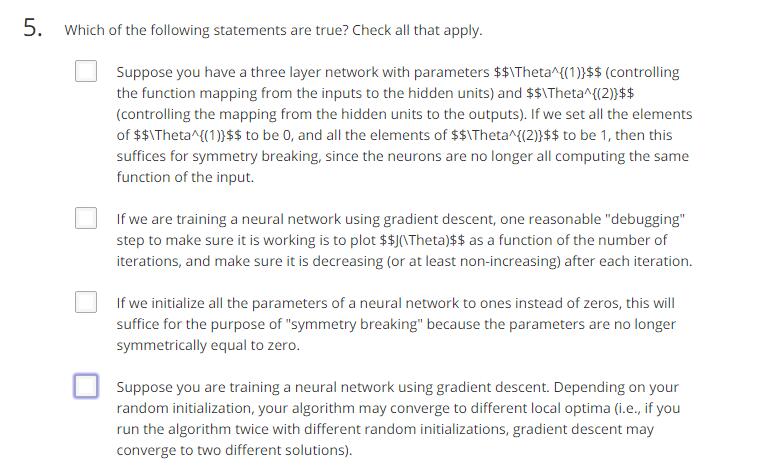
答案:BD
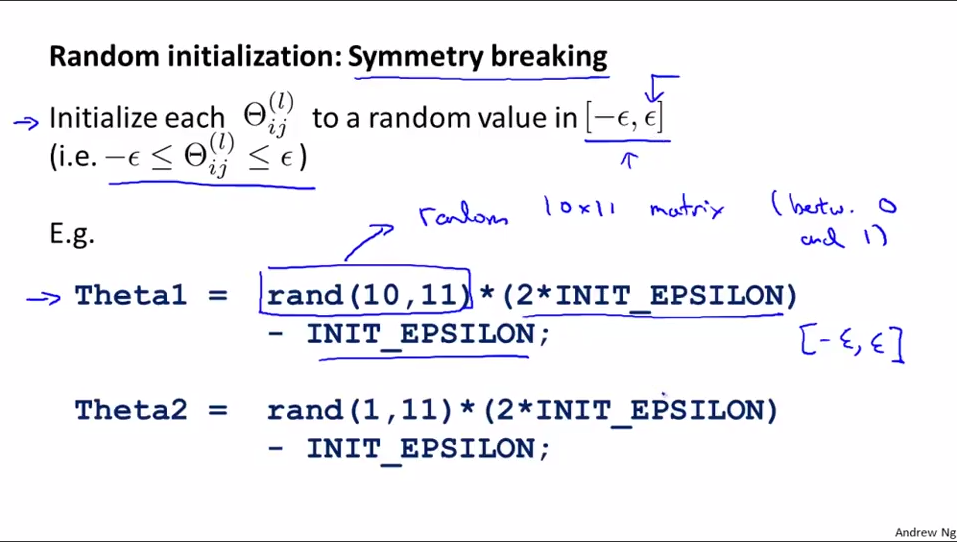
rand(a,b) 申请一个a*b的矩阵,矩阵元素大小在(0,1)。
总体来说,对权重进行随机初始化,然后反向传播,再执行梯度检查(使用梯度下降或者高级的优化算法)
5.7节 Putting It Together
对神经网络算法的所有的内容做一个总体的回顾。
神经网络的第一步是构建大体的框架:
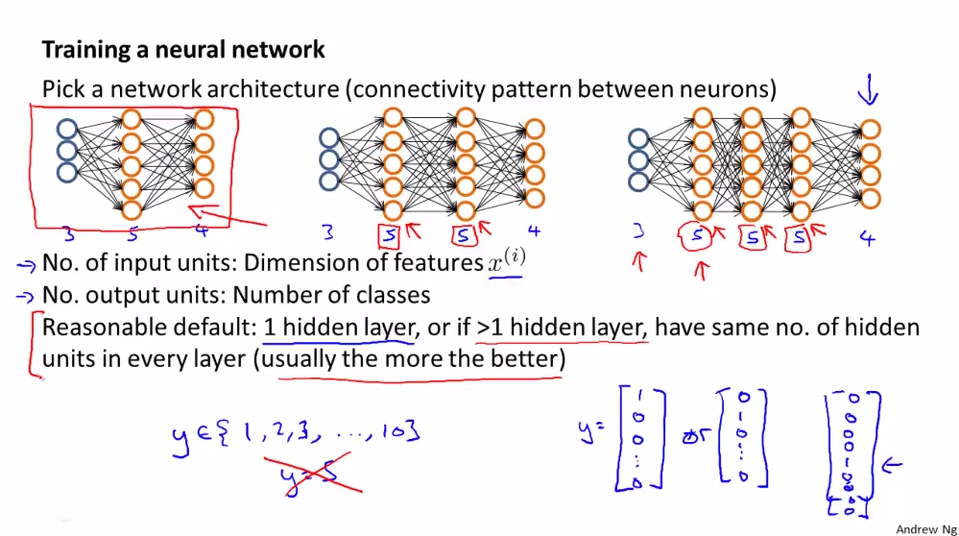
图中最左边是最基本的神经网络结构:输入层、隐藏层、输出层。
注意,如果有多个隐藏层,默认每个隐藏层神经单元数量相同。一般输入层神经单元个数就是实例的维度,输出层神经单元个数就是类别的个数。一般而言,隐藏层神经单元个数越多越好,但是计算量也会相应的增加。隐藏单元的数量要和其他参数相匹配。
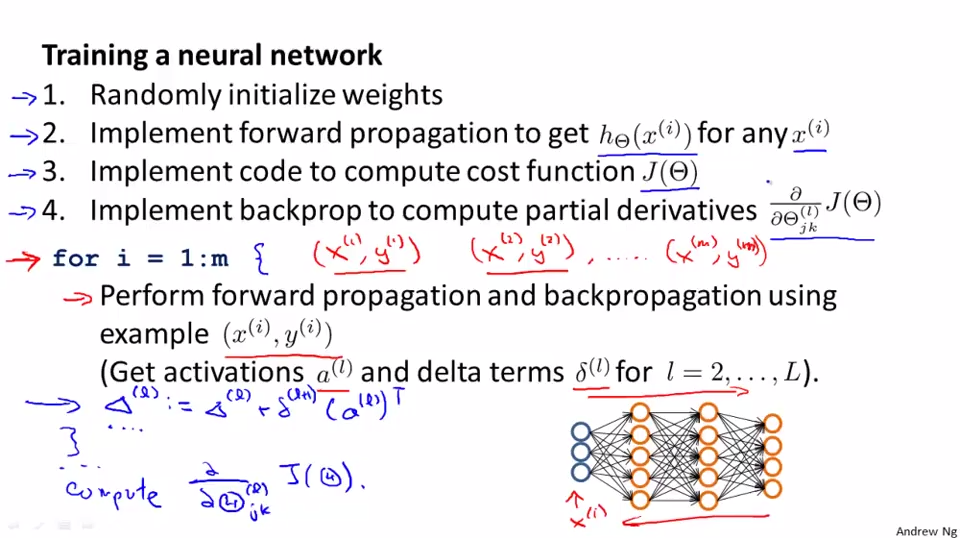
下面实现神经网络的训练过程,共6步:
1.随机初始化权重,初始化的权重值一般较小。
2.为每x(i)执行前向传播,算出hΘ(x(i))。
3.执行J(Θ)的计算代码。
4.执行反向传播,计算偏导数∂J(Θ)/∂(Θ(1)jk)。对m个测试实例,使用for循环,计算激励值a和Δ和δ。
5.对偏导数∂J(Θ)/∂(Θ(1)jk)进行梯度检验。偏导数代码没有问题后,关闭梯度检验部分代码。
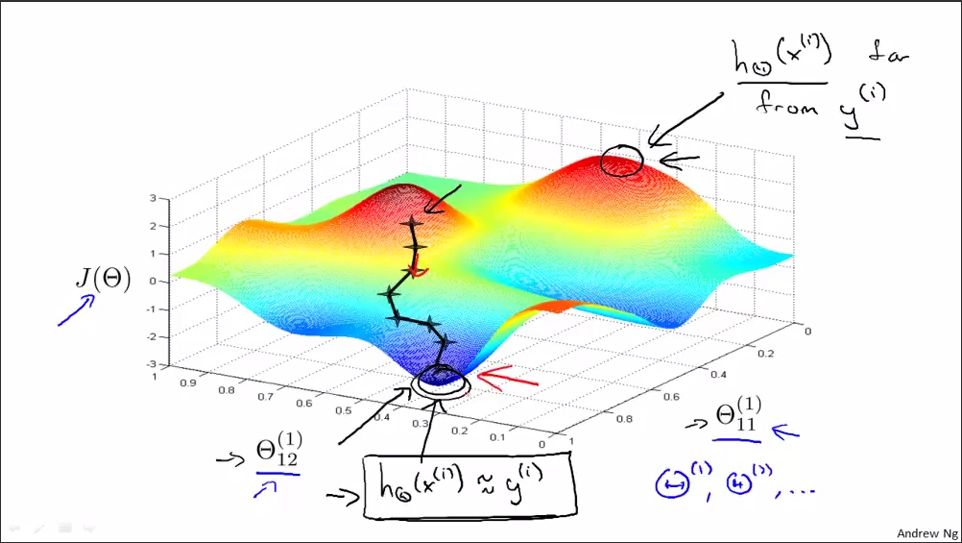
6.使用梯度下降或者其他高级算法执行反向传播,求出最小化J(Θ)时的各Θ值。
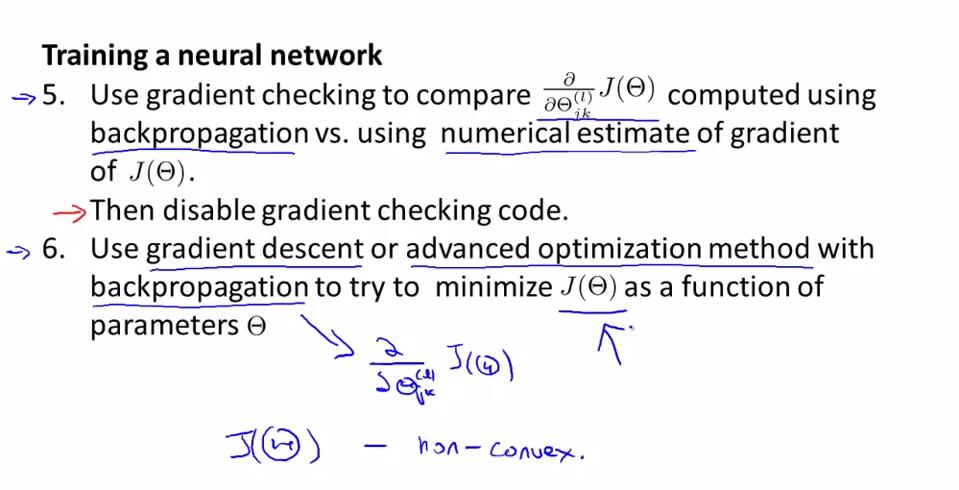
结合下图对神经网络中的梯度下降算法进行说明:从随机的初始点开始,一步一步地下降,直到取得局部最优值。像梯度下降这样的算法至少可以保证收敛到局部最优值。反向传播算法的目的是计算出梯度下降的方向,使代价函数不断减少至局部最优值。
5.8节 Autonomous Driving
介绍一个神经网络学习的重要例子:利用神经网络实现自动驾驶。

练习:
答案:BD
答案:AB
答案:BC
课程对应的作业不要忘记,对梳理知识很有帮助。
注意2点:
1.正则化代价函数中的正则化部分不能将偏差项引出的权重theta计算在内。
正则化公式: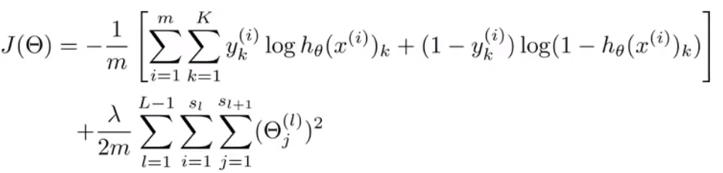
2.反向传播中,计算权重对应的偏导数时,所有由偏差项(偏差神经单元)引出的权重对应的δ都不必计算。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号