Operator与优化
Relation
关系这个词跟映射有点相似,对于一个关系\(R\),其是\((x, y)\)的一个集合集合。其中\(\text{dom }R=\{x|(x,y)\in R\}\),\(R(x)=\{y\vert (x,y)\in R\}\),其零集合是\(\{x| (x,y)\in R, y=0\}\)。
Operations on Relation
inverse. \(R^{-1}=\{(y, x)\vert (x,y)\in R\}\)composition. \(RS=\{(x, y)\vert (x,z)\in R, (z,y)\in S\}\)scalar multiplication. \(\alpha R=\{(x, \alpha y)\vert (x,y)\in R\}\)addition. \(R+S=\{(x, y+z)\vert (x,y)\in R, (x,z)\in S\}\)resolvent operator. \(S=(I+\lambda R)^{-1}\)
通过以上的运算可以看出,relation有点类似于凸函数中epigraph的那种集合定义。
Monotone Operations
对于一个单调的relation \(F\),其定义为
对于任意的\((x, y), (u,v)\in R\). 一个最大单调\(F\)的定义为,没有其他单调relation包含\(F\)。
\(F\)是最大单调当且仅当\(F\)是一个连接的曲线,其斜率不存在负值。
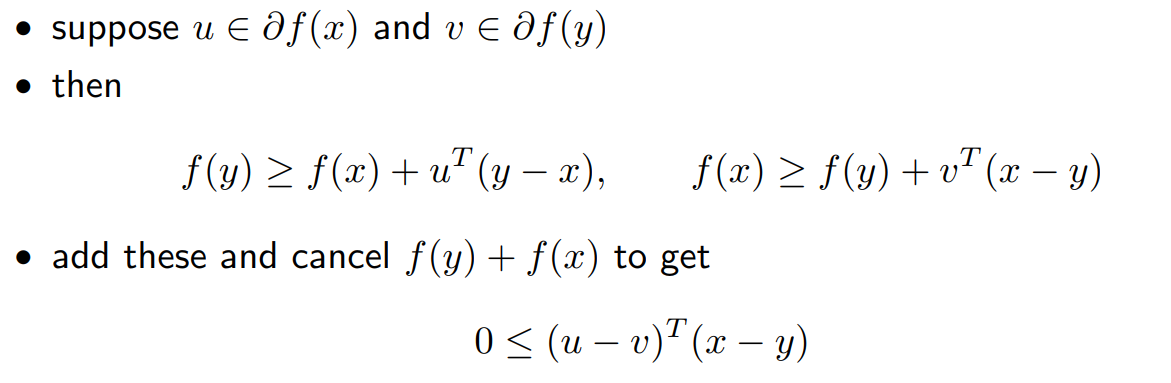
Case: Subgradient \(F=\partial f(x)\)
Nonexpansive and contractive operator
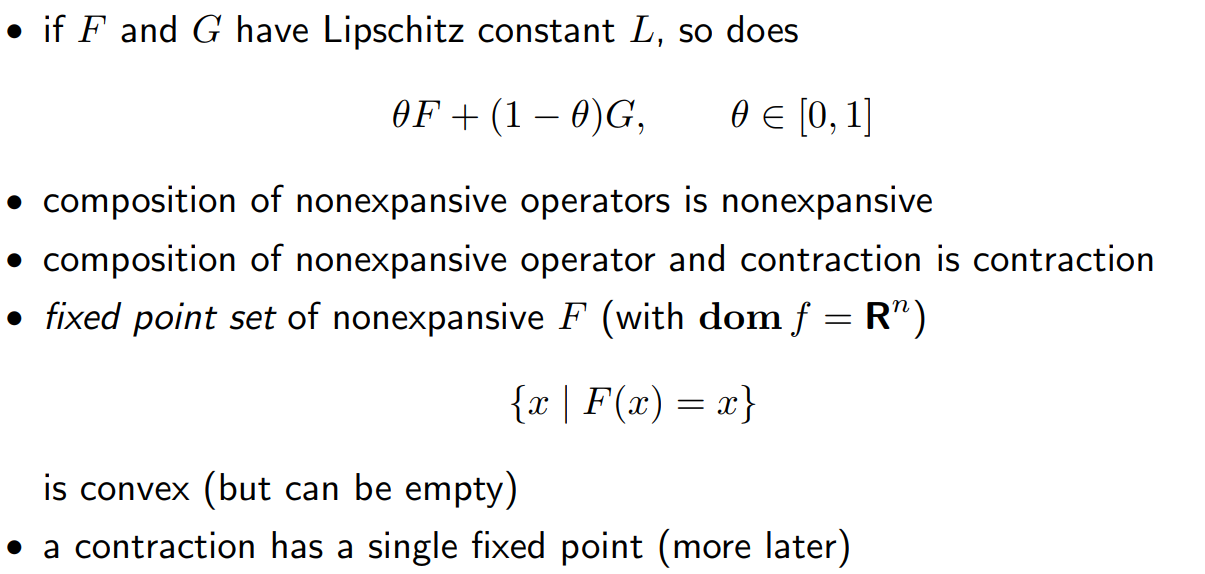
对于一个\(L-\)Lipschitz连续的operator \(F\),其nonexpansive和contraction的定义分别为\(L=1\)和\(L<1\)。
Characters:
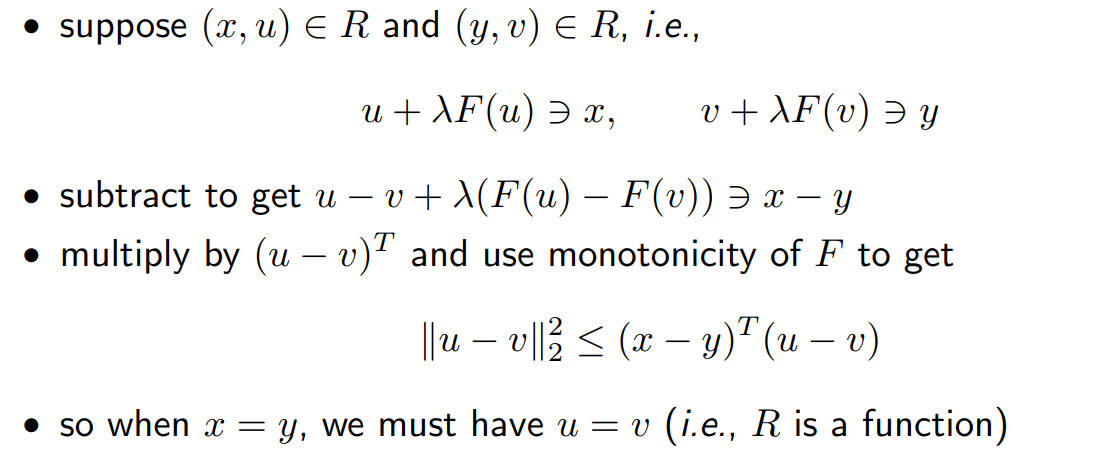
Resolvent operation and Cayley operator
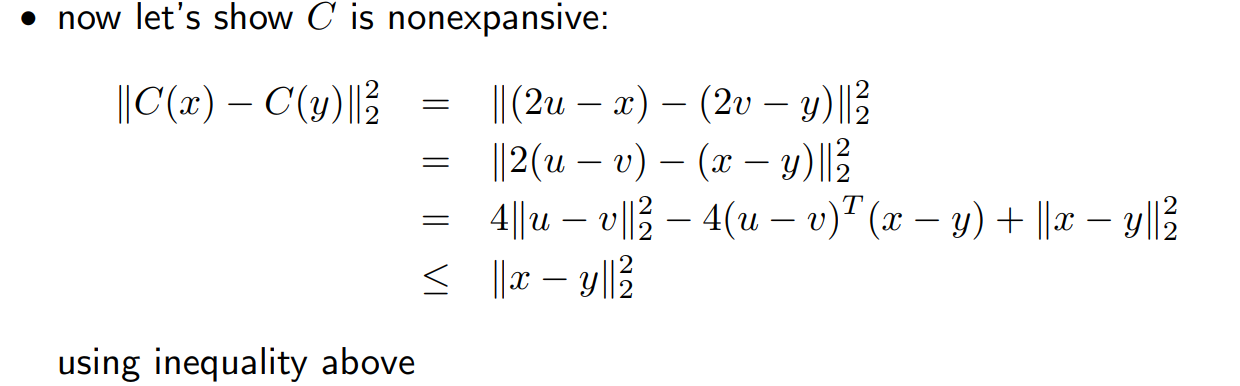
对于一个relation \(F\),当\(F\)是单调且nonexpansive时,\(R\) operator是contractive的。\(F\)的cayley operator定义为
同样当F是单调的时候,其cayley operator \(C\)是nonexpansive。
Proof:
Case:
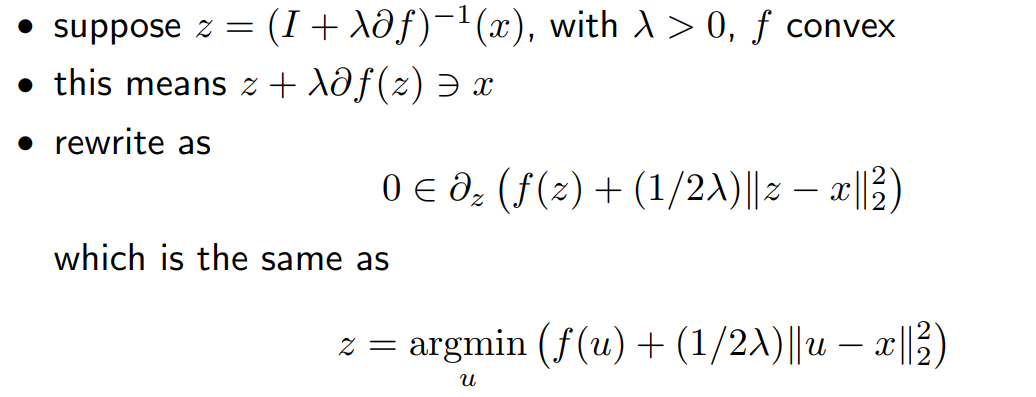
- Proximal
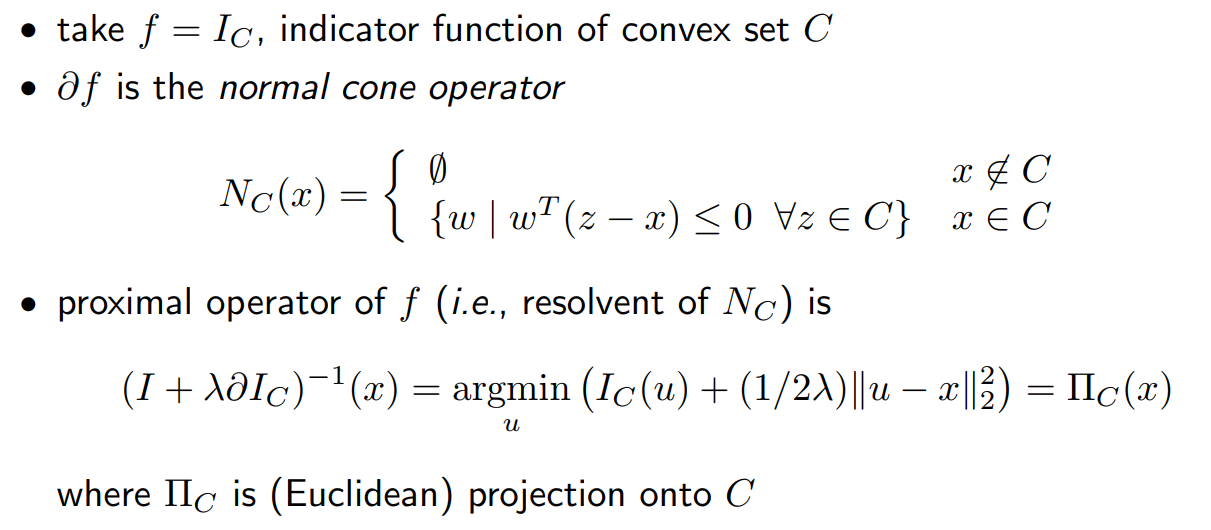
- Indicator
Fixed point of operators & zero set of \(F\)
这里有个很重要的定理就是Cayley和resolvent的Fixed point等价于\(F\) relation的zero set。也就是
Theorem: Banach fixed point theorem
当\(F\)是contraction,dom \(F=R^n\),那么\(F(x)\)会收敛到一个唯一的fixed point。
Damped iteration of a nonexpansive operator
相对于
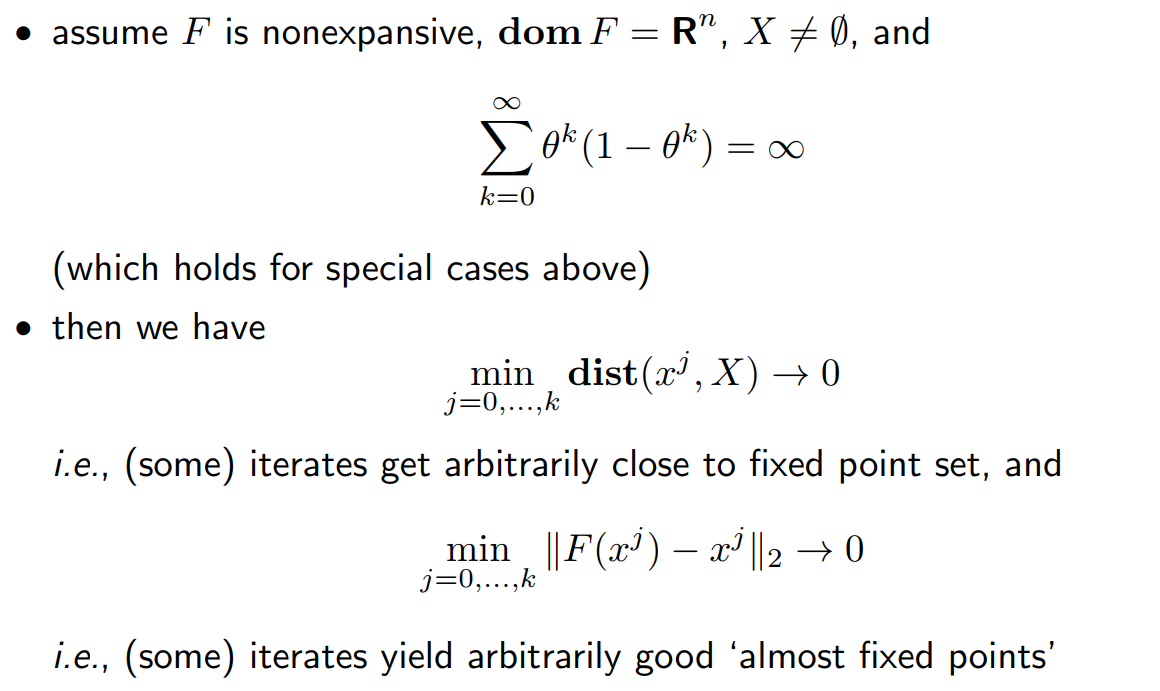
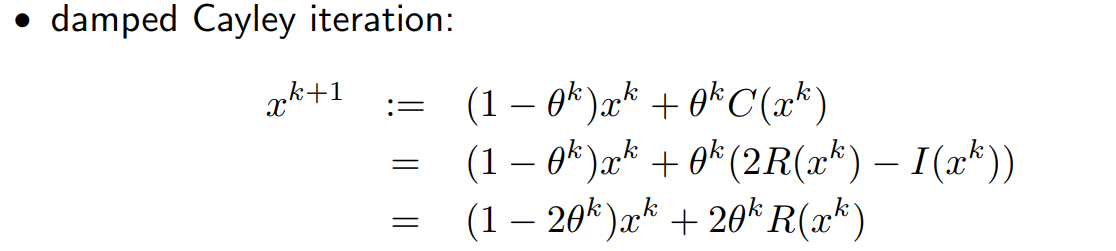
Damped iteration为一个\(x^k\)和\(F(x^k)\)的组合
Proof:
Case:
Operator Splitting
这里要解决的问题是一个relation \(F=A+B\),单独队\(F\)进行求解可能比较麻烦而分开对\(A\)和\(B\)求解更简单。
Theorem: 如果A和B是maximal monotone,那么
\[0\in A(x)+B(x) \Leftrightarrow C_AC_B(z)=z \]其中\(x=R_B(z)\)
Proof:
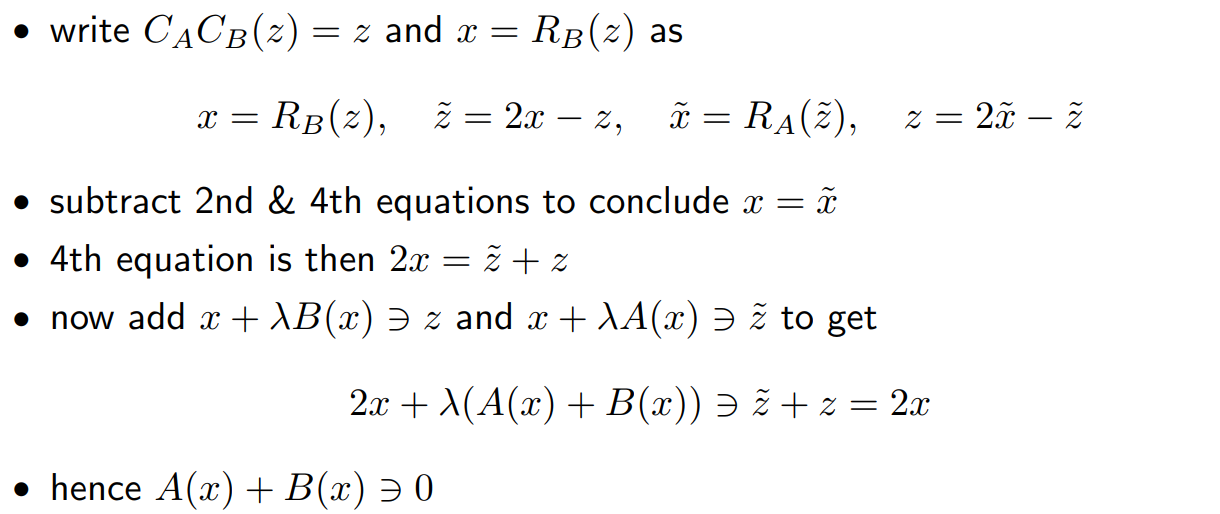
证明也是比较简单,使用定义就可以得到。
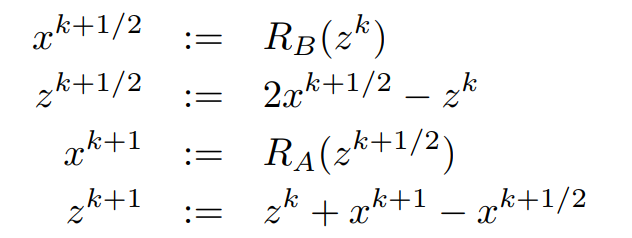
Peaceman-Rachford & Douglas-Rachfold Splitting
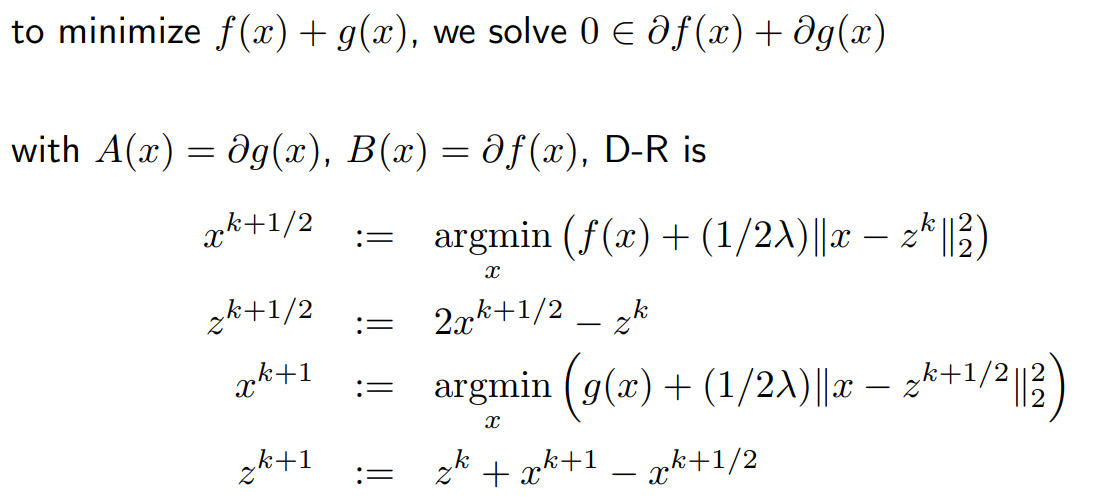
- Douglas-Rachfold updating
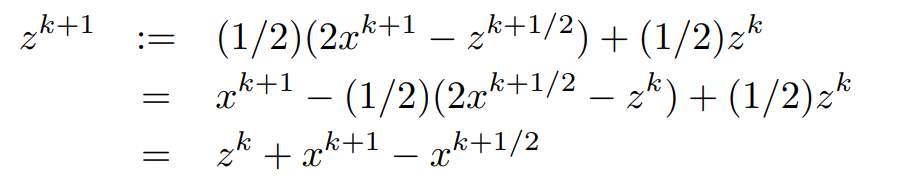
The last equation:
Case: Alternating direction method of multipliers
Case: Constrained optimization
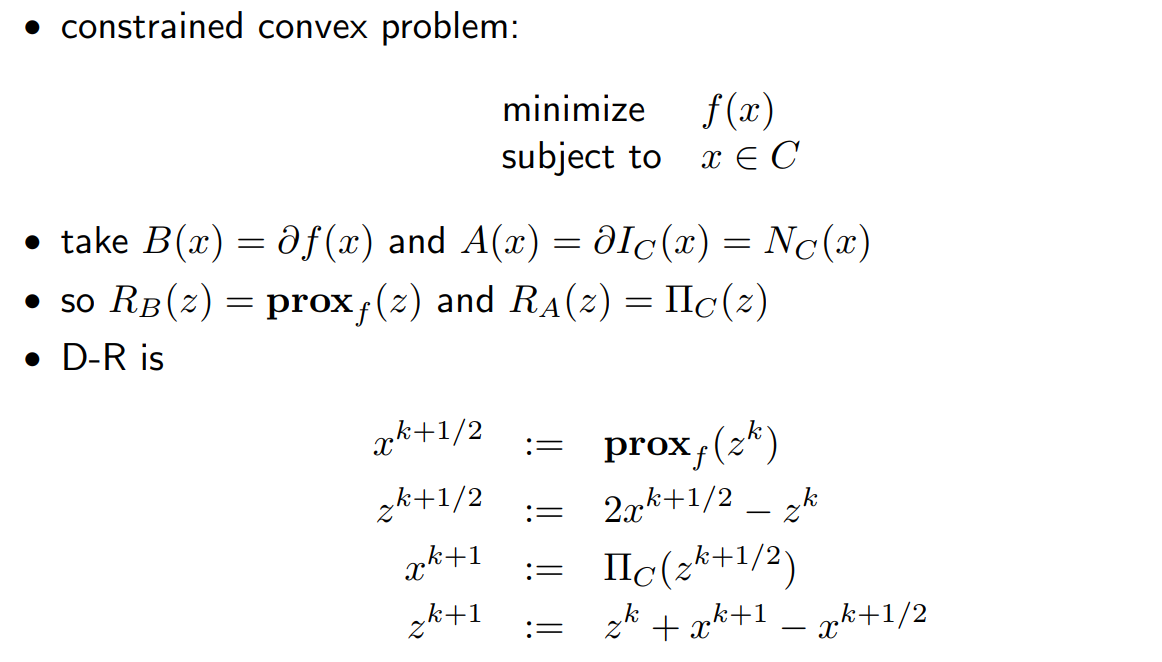
- Peaceman-Rachford updating
Case: FedSplit, a consensus problem
对于loss函数\(F\),以及consensus constrain,利用一阶方法求解最小值等价于
\[0\in \nabla F(x)+\mathcal{N}^{\bot} \]其中\(\mathcal{N}^{\bot}\)为其consensus的normal corn。
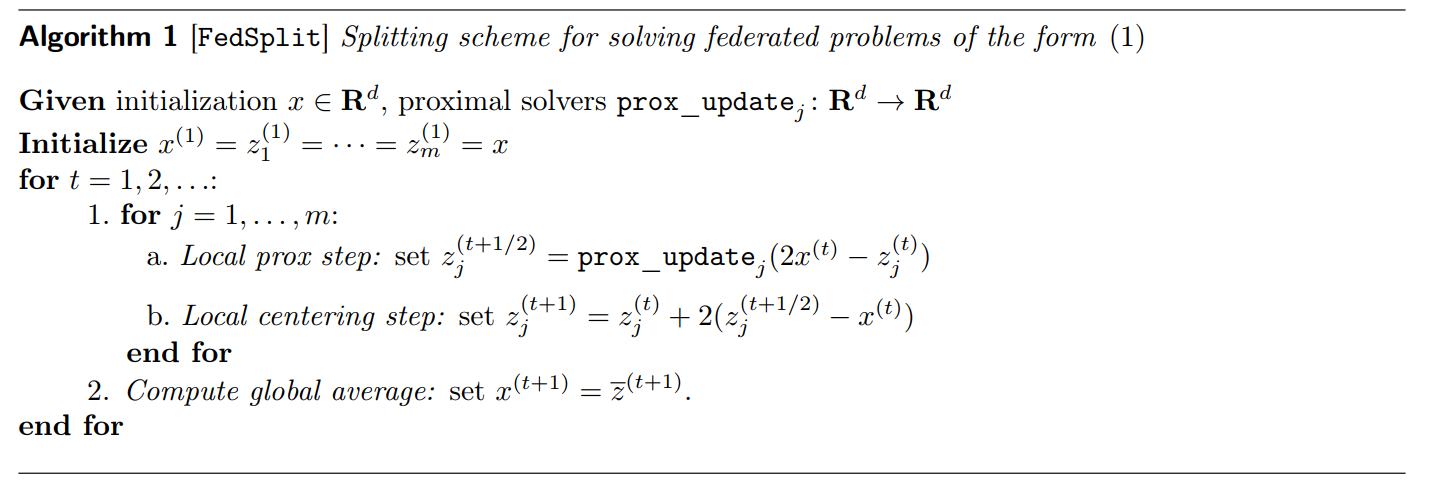
上图为其论文中的算法流程,这里的\(A\) operator为\(\mathcal{N}^{\bot}\),\(B\) operator为\(\nabla F\)而且由于\(x=\bar{z}\)在最后执行所以整个顺序都提前,并且算法中的第一步(a)直接整合了PR的中间两步。
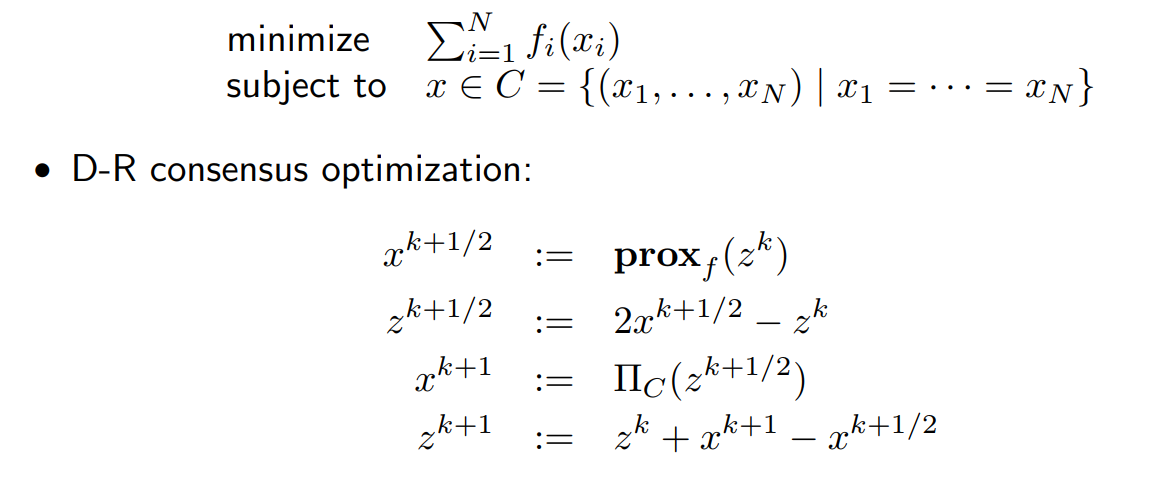
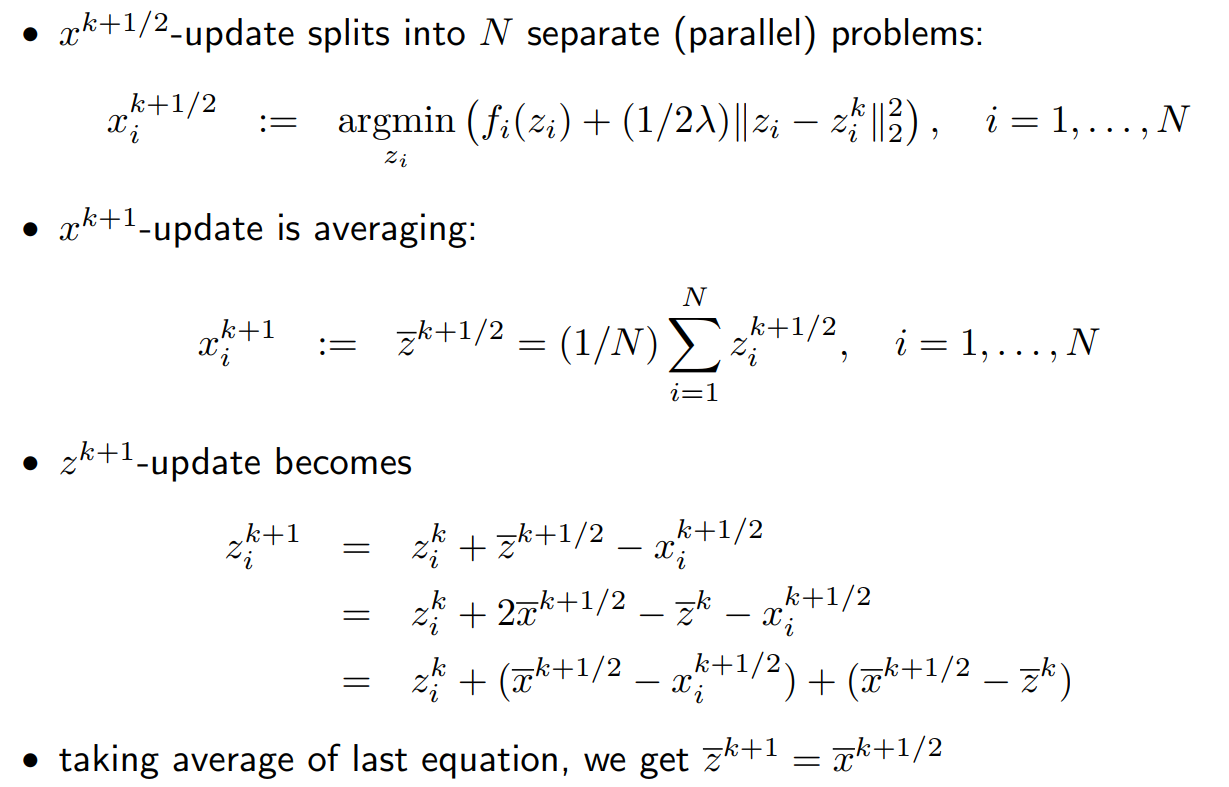
Consensus Optimization
% Solves the QP
% mininimze (1/2)||Ax - b||_2^2
% subject to Fx <= g
% using D-R consensus. Note that the code has not been optimized for
% runtime and is only presened to give an idea of D-R consensu. For better
% performance, the inner loop should be run in parallel and should use a
% fast QP solver for small problems (e.g., CVXGEN).
%
% EE364b Convex Optimization II, S. Boyd
% Written by Eric Chu, 04/25/11
%
close all; clear all
randn('state', 0); rand('state', 0);
%%% Generate problem instance
m = 1000;
n = 100;
k = 50;
xtrue = randn(n,1);
A = randn(m,n);
b = A*xtrue + randn(m,1);
F = randn(k,n);
g = F*xtrue;
%%% Use CVX to find solution
cvx_begin
variable x(n)
minimize ((1/2)*sum_square(A*x - b))
subject to
F*x <= g
cvx_end
xcvx = x;
fstar = cvx_optval;
%%% Douglas-Rachford consensus splitting
N = 10; % number of subproblems
MAX_ITERS = 50;
rho = 200;
z = zeros(n,N);
xbar = zeros(n,1);
for j = 1:MAX_ITERS,
% x = prox_f(z), could be done in parallel
for i = 1:N,
Ai = A(m/N*(i-1) + 1:i*m/N,:);
bi = b(m/N*(i-1) + 1:i*m/N);
Fi = F(k/N*(i-1) + 1:i*k/N,:);
gi = g(k/N*(i-1) + 1:i*k/N);
% use CVX to solve prox operator
zi = z(:,i);
cvx_solver sdpt3
cvx_begin quiet
variable xi(n)
minimize ( (1/2)*sum_square(Ai*xi - bi) + (rho/2)*sum_square(xi - zi) )
subject to
Fi*xi <= gi
cvx_end
x(:,i) = xi;
end
%% standard
%z_midterm = 2*x-z;
%xbar_prev = xbar;
%xbar = mean(z_midterm,2);
%infeas(j) = sum(pos(F*xbar - g));
%f(j) = (1/2)*sum_square(A*xbar - b);
%z = z + (xbar*ones(1,N) - x);
%% Boyd
xbar_prev = xbar;
xbar = mean(x,2);
% record infeasibilities
infeas(j) = sum(pos(F*xbar - g));
% record objective value
f(j) = (1/2)*sum_square(A*xbar - b);
% update
z = z + (xbar*ones(1,N) - x) + (xbar - xbar_prev)*ones(1,N);
end
%%% Make plots
subplot(2,1,1)
semilogy(1:MAX_ITERS, infeas);
ylabel('infeas'); set(gca, 'FontSize', 18); axis([1 MAX_ITERS 10^-2 10^2])
subplot(2,1,2)
plot(1:MAX_ITERS, f, [1 MAX_ITERS], [fstar fstar], 'k--');
xlabel('k'); ylabel('f'); axis([1 MAX_ITERS 300 2000]); set(gca, 'FontSize', 18);
print -depsc dr_consensus_qp.eps
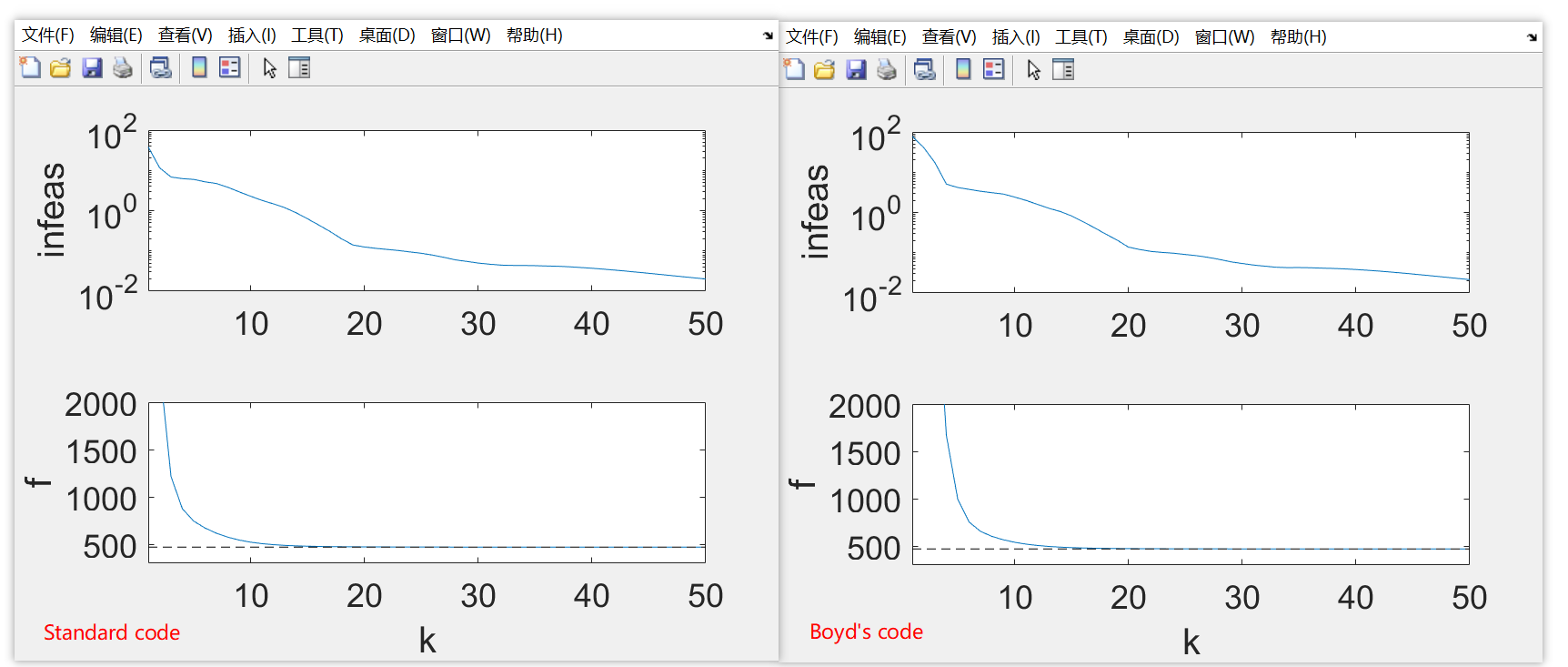
左边是我修改的,右边是Boyd的代码。看下来效果好像差不多,但是我还没搞懂他的代码为啥这样写。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号