网络流学习笔记
FBI Warning:本文全部抄自 OIwiki、蓝书、或其他博客,毫无自己的思考,没有什么学习价值。
零、基本概念
直接走 OIwiki 或者看蓝书吧。
一、最大流
1. Ford-Fulkerson 增广
“该方法运用贪心的思想,通过寻找增广路来更新并求解最大流。”
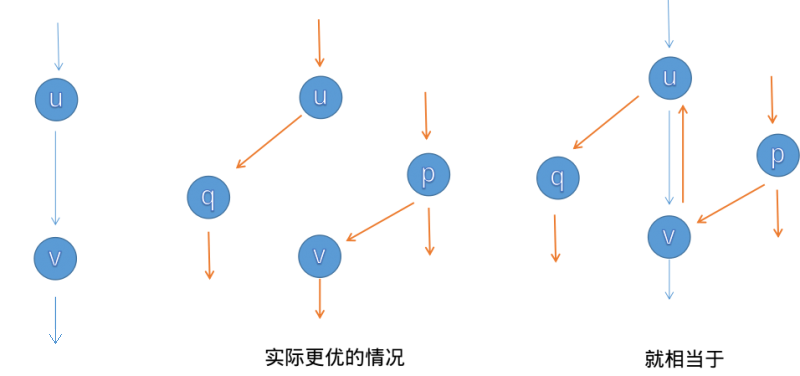
主要流程就是每次选一些增广路,以来更新最大流。但这个贪心思路不一定能保证正确性。Ford-Fulkerson 增广的核心技术是通过设置 反向边 来实现 反悔贪心。
反向边的特性:流量与正向边互为相反数,且始终不大于零。
以下的 Edmonds-Karp、Dinic 和 ISAP 都是基于 Ford-Fulkerson 增广的算法。
2. Edmonds-Karp
基本流程:每次用 Bfs 选择边数最少的一条增广路,如此反复,直到没有增广路。
时间复杂度:可以证明,增广总轮数的上界为
点击查看代码
#include<bits/stdc++.h>
#define ll long long
using namespace std;
const int MAXN = 205, MAXM = 5005;
int n, m, s, t, head[MAXN], pre[MAXN];
ll f[MAXN], maxflow;
bool vst[MAXN];
struct node{
int to, nxt;
ll wi;
} edge[MAXM*2];
inline void Add_edge(int i, int from, int to, int wi){
edge[i].to = to;
edge[i].wi = wi;
edge[i].nxt = head[from];
head[from] = i;
return;
}
inline bool Bfs(){
memset(vst, false, sizeof(vst));
memset(f, 0x3f3f, sizeof(f));//f:到当前节点为止,增广路上的最小边
queue<int> que; que.push(s); vst[s] = true;
while(!que.empty()){
int cur = que.front(); que.pop();
for(int i = head[cur]; i; i = edge[i].nxt){
if(!edge[i].wi) continue;
int to = edge[i].to;
if(vst[to]) continue;
f[to] = min(f[cur], edge[i].wi);
pre[to] = i;
vst[to] = true;
que.push(to);
if(to == t) return true;
}
}
return false;
}
inline void Update(){
for(int x = pre[t]; x; x = pre[edge[x^1].to])
edge[x].wi -= f[t], edge[x^1].wi += f[t];
maxflow += f[t];
return;
}
int main(){
scanf("%d%d%d%d", &n, &m, &s, &t);
for(int i = 1; i <= m; i++){
int ui, vi, wi; scanf("%d%d%d", &ui, &vi, &wi);
Add_edge(i*2, ui, vi, wi); Add_edge(i*2+1, vi, ui, 0);
}
while(Bfs()) Update();
cout<<maxflow;
return 0;
}
3. Dinic 算法
基本思想:注意到每次 EK 算法都在试着找一条边数最少的增广路。那么假如说现在有一个图,它到
基本流程:增广直到不存在增广路。每次增广时,先使用 Bfs 在残量网络上求出一个“分层图”(就是一个 DAG,满足每条边仅指向 Bfs 的下一层,满足上面所说的每条路径等长最小),然后用 EK 求分层图最大流,顺便就可以更新剩余容量。
优化:
-
后继完全增广完毕的点不访问。【常数优化】
-
当前弧优化:去掉已经增广过了的出边(代码中的 now 数组)。【复杂度优化】
-
Dfs 代替 EK 找分层图最大流:由于分层图的特殊性,这里使用 Dfs 可以得到一个常数更小、复杂度也一样的算法。
点击查看代码
#include<bits/stdc++.h>
#define ll long long
using namespace std;
const int MAXN = 205, MAXM = 5005;
const ll INF = 0x3f3f3f3f3f3f3f3f;
int n, m, s, t, head[MAXN], now[MAXN], d[MAXN];
//d:用于记录 bfs 层数,以建立分层图
struct node{
int to, nxt;
ll wi;
} edge[MAXM<<1];
inline void Add_edge(int i, int from, int to, int wi){
edge[i].to = to;
edge[i].wi = wi;
edge[i].nxt = head[from];
head[from] = i;
return;
}
inline bool Bfs(){
memset(d, 0, sizeof(d));
for(int i = 1; i <= n; i++) now[i] = head[i];
queue<int> que; que.push(s); d[s] = 1;//注意给 d[s] 赋初值,以免下方 BFS 卡死
while(!que.empty()){
int cur = que.front(); que.pop();
for(int i = head[cur]; i; i = edge[i].nxt){
if(!edge[i].wi) continue;
int to = edge[i].to;
if(d[to]) continue;
d[to] = d[cur]+1;
que.push(to);
if(to == t) return true;
}
}
return false;
}
inline ll Dinic(int x, ll flow){
if(x == t) return flow;
ll rest = flow;
for(int i = now[x]; i and rest; i = edge[i].nxt){//注意要保持 rest > 0
now[x] = i;//当前弧优化(请格外注意这里,老版蓝书上的写法有误!)
int to = edge[i].to;
if(!edge[i].wi) continue;
if(d[to] != d[x]+1) continue;
ll tmp = Dinic(to, min(rest, edge[i].wi));
if(!tmp) d[to] = 0;//去掉接下来没有可增广的点
rest -= tmp;
edge[i].wi -= tmp;
edge[i^1].wi += tmp;
}
return flow-rest;
}
int main(){
scanf("%d%d%d%d", &n, &m, &s, &t);
for(int i = 1; i <= m; i++){
int ui, vi, wi; scanf("%d%d%d", &ui, &vi, &wi);
Add_edge(i*2, ui, vi, wi); Add_edge(i*2+1, vi, ui, 0);
}
ll maxflow = 0;
while(Bfs()) maxflow += Dinic(s, INF);
cout<<maxflow;
return 0;
}
时间复杂度:
-
一般情况:可证明单轮增广复杂度为
-
单位容量网络(边权都为 0/1):
-
单位容量网络 + 除了源、汇点外,出或者入度为 1(即求 二分图最大匹配 时的网络):
4. ISAP 算法
基本思想:ISAP 可看作对 Dinic 的常数优化。在 Dinic 中,每次求完分层图的最大流时,都需要 Bfs 一次。而 ISAP 的思想就是:每次增广时实时更新分层图,就只需要在开头进行一次 Bfs 即可。
基本流程:
-
进行第一次 Bfs,在反向图上,处理一个以 t 为起点的 d 数组。(因为)
-
执行 Dfs,直到 d[s] > n:
-
前面与 Dinic 一模一样。
-
如果当前节点 x 被完全增广了(即流入量还有剩余),那么尝试更新 d[x]:
访问 x 的每一条出边,求它后继的 d 数组最小值,并将 d[x] 设置为最小值加一。
-
如果找不到任何一个后继,将 d[x] 设置为 n+1。
-
否则更新 d[x],重置当前弧优化数组 now[x]。
-
-
点击查看代码
inline void Bfs(){
queue<int> que; que.push(t); d[t] = 1;
for(int i = 1; i <= n; i++) now[i] = head[i];
while(!que.empty()){
int cur = que.front(); que.pop();
for(int i = head[cur]; i; i = edge[i].nxt){
int to = edge[i].to;
if(d[to]) continue;
d[to] = d[cur]+1;
que.push(to);
}
}
return;
}
inline void Update(int x){
int nd = n+1;
for(int i = head[x]; i; i = edge[i].nxt)
if(edge[i].ci) nd = min(nd, d[edge[i].to]+1);
d[x] = nd;
now[x] = head[x];
return;
}
inline ll ISAP(int x, ll flow){
if(x == t) return flow;
ll rest = flow;
bool flag = false;
for(int i = now[x]; i and rest; i = edge[i].nxt){
if(!edge[i].ci) continue;
int to = edge[i].to;
if(d[to]+1 != d[x]) continue;
now[x] = i;
ll k = ISAP(to, min(rest, edge[i].ci));
edge[i].ci -= k;
edge[i^1].ci += k;
rest -= k;
}
if(rest) Update(x);
return flow-rest;
}
还有另一种写法,可以减少码量:在 update 函数中,只需要将 d[x]++ 即可。
这个时候就有人(比如我)要问了:为什么可以这样?按照原本来说,d[x] 不一定只增加 1 啊?
但若 d[x] 在此处的增加不合法的话,下一次迭代到 x,它会再次 +1,一直迭代直到合法为止。
这个时候又有人要问了:那这样常数好大啊!
但原本 update 函数的常数就很大啊:要访问 x 的每一条出边。因此不分伯仲罢了。
除了当前弧优化外,ISAP 还有一种优化:GAP 优化。记录每一种 d 数组的每一个值的数量 gap[d[x]]。当更新 d 时出现一个 gap[d[x]] 变成 0,那么说明出现了 “断层”,可以推断出增广已经结束。
inline void Update(int x){
if(--gap[d[x]] == 0) {END = true; return;}
++gap[++d[x]];
now[x] = head[x];
return;
}
5. 例题
- P2766 最长不下降子序列问题:点化边的技巧:拆为入点 & 出点,在二者之间的边权代表取次数的限制。
二、最小割
1. 定义 & 定理
一种点的划分方式(或者说边集):将所有的点划分为
割的容量:所有从
最小割:求得一个割使得该割容量最小。或者说,在一个网络中删去一些边使得该图
最大流最小割定理:最大流 = 最小割。感性地反证一下,最小割如果小于最大流,则删去最小割后仍存在增广路,那么最小割并没使图不连通,所以最小割大于等于最大流,相等时最大流取最大、最小割取最小。【详细证明:here,我会回来看的。】
构造最小割:在求完最大流之后,在剩下的残量网络中,源点能到达的点 与 不能到达的点 之间的所有边。(明显,这些边的和即为最大流。)
2. 例题
- 有线电视网:网络流建模的 边点互换 和 INF 防割断 技巧。点转边:拆为入点 + 出点,边转点:加一个点即可。还有求多源点多汇点最小割技巧:枚举源点汇点即可。
三、费用流
1. 概念
网络上每条边不但有容量限制
该网络中总费用最小的最大流称为 最小费用最大流,同理还有最大费用最大流,合称费用流。
注意,费用流一定是建立在最大流的基础上的。
2. 算法
费用流的主流算法为 SSP 算法,一般来说就已经够用了。【详见:关于网络流费用流算法复杂度】
SSP 仍旧是基于 Ford-Fulkerson 增广求最大流的,反边容量设置为 0、费用设置为相反数。只不过在寻找增广路时,它并不是像 EK、Dinic 那样选择边数最少的那一条,而是选择费用最少的一条。正确性是显然的。
所以,实现时只要把 EK 或 Dinic 的 Bfs 部分换成 SPFA 就可以了。(因为有反向边有负边权,就不能用 dijkstra。(关于为什么不会产生负环:【???我不道啊】))
由于失去了 Bfs 的复杂度保证,这里的复杂度只能做到 FF 增广任选路径时的复杂度:设最终求出最大流的值为
具体实现建议直接以原本 EK 为框架,不用写 Dinic 了。因为反正都失去了 Bfs 的复杂度保证,EK、Dinic 实现的 SSP 版本实际复杂度没有什么区别。
点击查看代码
#include<bits/stdc++.h>
#define ll long long
using namespace std;
const int MAXN = 5005, MAXM = 5e4+5;
int n, m, s, t, head[MAXN], pre[MAXN];
bool inq[MAXN];
ll w[MAXN], c[MAXN], maxflow, mincost;
struct node{
int to, nxt;
ll ci, wi;
} edge[MAXM<<1];
inline void Add_edge(int i, int from, int to, int ci, int wi){
edge[i] = (node){to, head[from], ci, wi}, head[from] = i;
return;
}
inline bool SPFA(){
memset(c, 0x3f3f, sizeof(c));
memset(w, 0x3f3f, sizeof(w));
queue<int> que; que.push(s);
w[s] = 0, pre[t] = 0;//inq[s] 可以不标,pre[t] 用于判断有无解
while(!que.empty()){
int cur = que.front(); que.pop();
inq[cur] = false;
for(int i = head[cur]; i; i = edge[i].nxt){
int to = edge[i].to;
//怎么求出一条路径的最小费用?怎么找到一条最小费用路?
//直接相加费用就可以了
//因为增长流量在路上每一处都是相等的,满足分配律
if(!edge[i].ci or w[to] <= w[cur]+edge[i].wi) continue;
w[to] = w[cur]+edge[i].wi;
c[to] = min(c[cur], edge[i].ci);
pre[to] = i;
// if(to == t) return true;不能这么写,因为 SPFA 不能直接确定最短
if(!inq[to]) que.push(to), inq[to] = true;
}
}
return pre[t];
}
inline void Update(){
for(int i = pre[t]; i; i = pre[edge[i^1].to]){
edge[i].ci -= c[t], edge[i^1].ci += c[t];
mincost += edge[i].wi*c[t];
}
maxflow += c[t];
return;
}
int main(){
scanf("%d%d%d%d", &n, &m, &s, &t);
for(int i = 1; i <= m; i++){
int ui, vi, ci, wi; scanf("%d%d%d%d", &ui, &vi, &ci, &wi);
Add_edge(i*2, ui, vi, ci, wi); Add_edge(i*2+1, vi, ui, 0, -wi);
}
while(SPFA()) Update();
cout<<maxflow<<" "<<mincost;
return 0;
}
四、最小割树
1. 描述
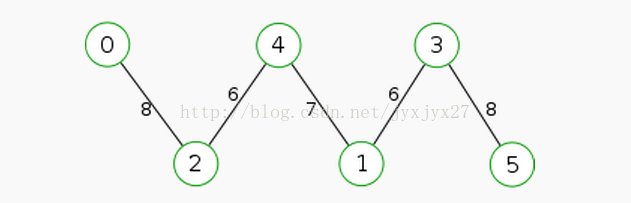
P4897 【模板】最小割树(Gomory-Hu Tree)
给定一个无向连通图,多次查询,询问不同源点汇点间的最小割。(既然能查询最小割,那肯定也可以查询最大流。)
2. Gomory-Hu Tree 算法
这个算法使用了两种思想:分治 + 最小割。
最小割树的定义:
对于任意树边
满足 为原图中 之间的最小割, 分开的两部分点为原图中 之间的最小割分开的两部分点。

如果代码按照某种特定写法写的话,建出来的树一定是一条链。
引理:
树上任意两点
的最小割,是二者在树上路径所经过边的最小值。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 地球OL攻略 —— 某应届生求职总结
· 周边上新:园子的第一款马克杯温暖上架
· Open-Sora 2.0 重磅开源!
· 提示词工程——AI应用必不可少的技术
· .NET周刊【3月第1期 2025-03-02】