opencv-学习笔记(2)
opencv-学习笔记(2)
这章记录了
- 获取像素点,改变像素点
- 获取图像的属性(行,列,通道数,数据类型)
- roi感应区
- 拆分以及合并图像通道
- 边缘扩充
opencv获取像素点,改变像素点
----下面是一般方法
获取像素很简单只需要img[x,y]就可以获取像素
img[x,y,0/1/2]就可以获取brg中某一值
修改也很简单img[100,100]=[255,255,255]即可
----优化
我们用item获取元嵩
itemset改变元素
代码如下
import numpy as np
import cv2
img=cv2.imread('1.jpg',1)
print(img.item(10,10,2))
img.itemset((10,10,2),100)
print(img.item(10,10,2))
opencv获取图像的行列和通道数
用函数img.shape即可
img.size获取像素数目
img.dtype获取图像数据类型
opencv里面一般是##uint8

图像感应ROI
简单获取感应区只需要
img[100:200,0:200]#获取100列到200列,0行到200行
import numpy as np
import cv2
img=cv2.imread('new.jpg',1)
ball=img[100:200,0:200]#100列到200列,0行到200行
img[400:500,400:600]=ball
cv2.imshow('fuck',img)
cv2.waitKey(0)
效果如下

opencv拆分以及合并图像通道
cv2.namedWindow('bgr')
img=cv2.imread('1.jpg',1)
img[:,:,2]=0
cv2.imshow('bgr',img)
cv2.waitKey(0)
这段代码把所有红色设为0
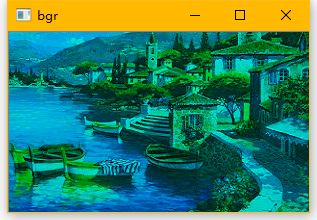
得到蓝绿图

红蓝img[:,:,1]=0
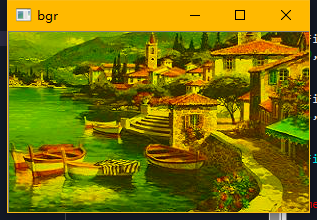
最后是红绿图。
图像边缘扩充

cv2.copyMakeBorder(图像对象,上下左右四个边界的扩充像素,扩充方式)
扩充方式有
cv2.BORDER_REPLICATE
cv2.BORDER_REFLECT
cv2.BORDER_REFLECT_101
cv2.BORDER_WRAP
cv2.BORDER_CONSTANT,value=BLUE
这里不放图了
转载请标明出处


 浙公网安备 33010602011771号
浙公网安备 33010602011771号