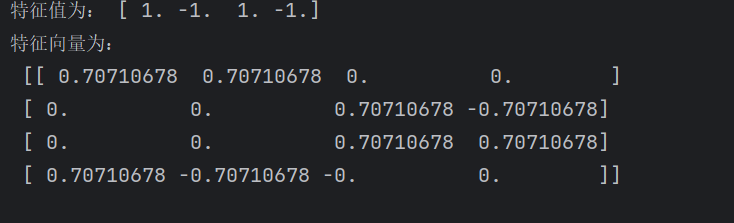
import numpy as np a = np.eye(4) b = np.rot90(a) c, d = np.linalg.eig(b) print('特征值为:', c) print('特征向量为:\n', d)