【从0开始编写webserver·基础篇#01】为什么需要线程池?写一个线程池吧
线程池
参考:
1、游双Linux高性能服务器编程
注:虽然是"从0开始",但最好对(多)线程、线程同步等知识点有所了解再看,不然可能有些地方会理解不到位(但也有可能是我没说明到位,水平有限,见谅)
Web服务器与线程池的关系
Web服务器需要同时处理多个客户端请求,并且每个请求可能需要花费很长时间来处理,如数据库查询、文件读写等操作。
因此Web服务器不太可能是单线程的,要实现并发操作就必须引入多线程技术
使用线程池的服务器属于多线程服务器。线程池本质上是一种多线程技术,通过在程序启动时创建一定数量的工作线程,并将所有请求任务加入到任务队列中,以便线程池中的多个工作线程可以同时处理请求任务。
在Web服务器中,线程池的作用是有效地处理并发请求,提高服务器的并发能力和性能。
具体地,Web服务器通过线程池实现以下几个方面的功能:
- 提高并发性能:线程池可以在同一时刻处理多个请求,从而提高服务器的并发处理能力,减少请求响应时间。
- 控制线程数量:线程池可以控制同时执行的线程数量,从而避免线程数目过多导致系统资源耗尽。
- 管理线程状态:线程池可以对工作线程进行管理,并监测工作线程的状态,如是否空闲、是否存活等。
- 避免线程创建销毁开销:使用线程池可以避免频繁地创建和销毁线程,从而减少系统开销,提高服务器的性能。
实现一个线程池
前置知识:互斥锁、信号量、C++模板编程
(注:代码中使用的)
线程池在代码实现上是一个模板类,使用模板的原因是方便进行复用
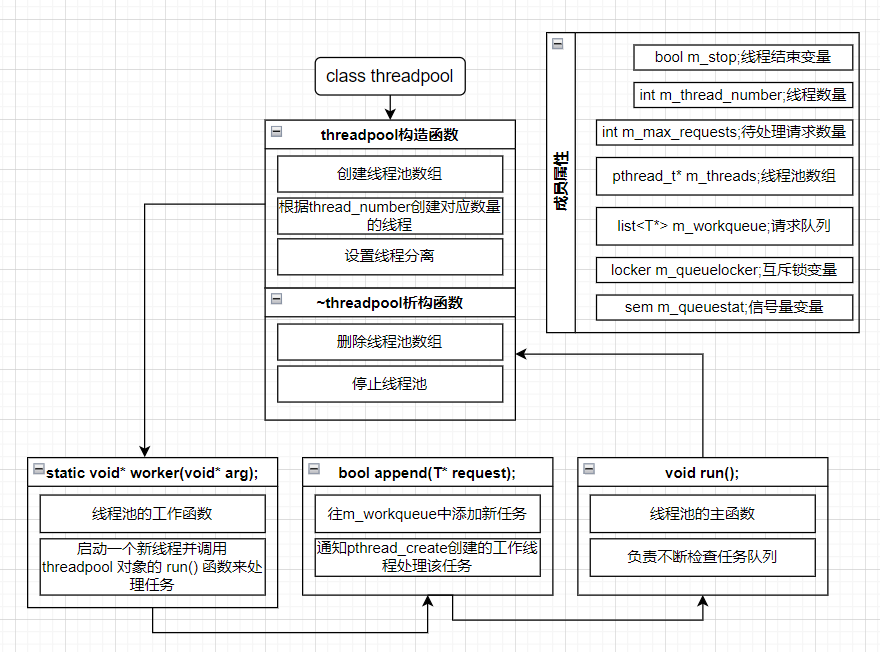
线程池模板类,主要用于管理多个线程并处理任务。其中包含以下主要成员变量和函数:
- 成员变量:线程数量(m_thread_number)、最大请求数(m_max_requests)、线程池数组(m_threads)、请求队列(m_workqueue)、互斥锁(m_queuelocker)、信号量(m_queuestat)和是否停止标志(m_stop)。
- 成员函数:构造函数(threadpool())、析构函数(~threadpool())、添加任务(append())、子线程中要执行的工作函数(worker())和启动线程池中的一个或多个线程进行任务处理的函数(run())。
下面是该代码的工作流程和原理:
1、创建线程池
创建时,会先判断线程数和最大请求数是否小于等于0。之后,会创建一个大小为 m_thread_number 的线程池数组,并将其设置为线程脱离状态,即在创建完线程之后就可以将其与当前的进程分离,避免线程阻塞主线程和其他相关线程的运行。如果创建时失败,则抛出异常。
2、添加任务
往任务队列中添加请求时,会先加锁(使用互斥锁),以确保多个进程不会争抢。之后,会判断任务队列中的请求数是否超过 m_max_requests,如果队列大小大于最大请求数,则解锁并返回 false。否则,将请求添加到队列中,解锁并增加信号量,通知线程池中的线程,有新任务需要处理。最终返回 true。
3、线程工作函数
当收到信号量后,线程会先上锁(使用互斥锁),以确保多个线程不会同时访问队列。之后,会判断任务队列是否为空。如果队列为空,则解锁并继续等待下一次信号量的到来。否则,取出队列顶部的请求,并将其弹出队列。最后,解锁,并调用任务函数(request->process())。
4、析构函数
执行析构函数时,将 m_stop 设置为 true,供线程判断是否要停止。
定义线程池类
先来定义一下线程池类
template<typename T> threadpool {
private:
int m_thread_number;//线程数
int m_max_requests;//最大请求数
bool m_stop;//停止符
pthread_t* m_thread;//线程池数组
std::list<T*> m_workqueue;//任务队列
locker queuelocker;//互斥锁,locker是对系统提供的mutex方法的封装,位于locker.h中
sem m_queuestat;//信号量
private:
static void* worker(void* arg);//工作函数
void run(); //线程池的主函数,用于检查任务队列中的请求
public:
threadpool(int m_thread_number = 8, int m_max_requests = 1000);//构造
~threadpool();//析构
bool append();//将请求加入m_workqueue中
}
其实也没有很复杂,但是有以下几个点需要注意:
1、线程池数组m_thread和任务队列m_workqueue是没有直接联系的
在线程池类初始化时,线程池数组就会根据指定的 线程数m_thread_number 来创建对应数量的线程
这些线程会被阻塞(一直调用 run函数 检查 m_workqueue 中有无请求),直到 **外部调用线程池对象的代码 **通过调用threadpool<T>类的对象的append()方法 向任务队列中添加新的任务
这时,append()才会定义模板类中声明的 任务队列m_workqueue(也就是往队列中push请求任务)
此时,之前被创建的某个线程检查到队列中有任务,于是其获取到了锁
将队列中的请求弹出,调用对应的任务函数进行处理
综上,虽然线程池数组和任务队列没有直接联系,但是他们具有协作关系,实现服务器对于请求的监听和处理操作
2、工作函数为什么要定义为静态的,并且其返回值为什么是void*?
在C语言中,函数的返回值只能是一个类型。但是有些时候,我们需要从一个函数中返回多个值或者不同类型的值。
在这种情况下,我们可以使用指针或者void指针来达到这个目的。
在这里,worker被定义为static void*,其中void*表示一个指向内存地址的指针,但是它没有指定具体的数据类型。
这意味着worker函数可以返回任何类型的指针,这使得worker函数具有更大的灵活性,并且可以处理各种不同类型的数据。
同时,通过将worker函数声明为static,它只能在当前文件中使用,可以避免与其他文件中的函数名称重复的问题。
好了,线程池模板类定义完了,现在需要在类外分别实现各个成员函数
按顺序来:构造函数->析构函数->...
实现线程池构造函数
构造函数负责根据给定的thread_number来创建线程
首先,我们需要判断所给的参数范围是否合法
然后创建线程池数组,大小为thread_number,最后调用pthread_create函数创建线程,使用pthread_detach函数将线程设置为脱离状态
template<typename T> //通过参数列表进行初始化
threadpool<T>::threadpool(int thread_number, int max_requests):m_thread_number(thread_number),m_max_requests(max_requests),
m_stop(false), m_threads(NULL){
//异常判断,线程数和最大请求数小于0,报错
if((thread_number <= 0) || (max_requests <= 0)){
throw std:: exception();
}
m_threads = new pthread_t[m_thread_number];//创建线程池数组
if(!m_threads){
throw std:: exception();
}
for(int i = 0; i < thread_number; ++i){
printf("创建第 %d 个线程\n", i);
if(pthread_create(m_threads + i, NULL, worker, this) != 0){
delete[] m_threads;
throw std::exception();//创建失败
}
if(pthread_detach(m_threads[i])){//在调用pthread_detach()函数之后,线程将进入“分离”状态,这意味着它不能再被其他线程或主线程等待和加入。
}
}
}
从构造函数可知,线程是在线程池创建时就被创建的,并且数量是固定的
有以下注意点:
1、pthread_create函数的传入参数
pthread_create()函数需要四个输入参数,分别是:
1.线程标识符指针(pthread_t *),用于存储新创建线程的标识符;
2.线程属性指针(const pthread_attr_t *),用于设置新线程的属性。如果不需要设置,则可以将该参数设置为NULL;
3.指向函数的指针(void (start_routine) (void *)),用于作为新线程的入口点。新线程开始执行时会从该函数开始执行;
4.传递给新线程入口点函数的参数指针(void *),该参数可以是任意类型的指针,它会被传递给新线程入口点函数。
在本代码中,pthread_create()函数的第一个参数是一个pthread_t类型的指针,该指针用于存储新创建线程的标识符。
第二个参数设置为NULL,因为我们不需要设置新线程的属性。
第三个参数是一个指向worker函数的指针,作为新线程的入口点。
最后一个参数是一个指向当前threadpool对象的指针,它被传递给worker函数作为参数,让worker函数能够访问到threadpool对象的所有
成员。
m_threads + i 表示将 m_threads指针 向后偏移 i 个 pthread_t类型的长度,即指向线程池中第i个工作线程的标识符。
m_threads 是一个指向pthread_t类型的数组,当使用 m_threads[i] 时,实际上是对m_threads数组中第i个元素进行访问。
因此,m_threads + i 表示对 m_threads数组 进行偏移,使其指向第i个元素的地址。
在pthread_create()函数中,需要传递一个指向线程标识符的指针作为参数,来保存新建线程的标识符。
因此,可以使用 m_threads + i 作为该参数,表示将指向第i个工作线程的标识符的地址传递给pthread_create()函数。
worker是一个静态成员函数,它作为线程执行的入口点,用于处理任务队列中的请求。
this指针是一个指向当前threadpool对象的指针,它被传递给worker函数作为参数。
由于worker函数是静态的,因此无法访问threadpool对象的非静态成员。
(为了防止重名所以设为静态)
因此,需要将threadpool对象的指针作为参数传递给worker函数,以便让worker函数能够访问threadpool对象的所有成员。
在pthread_create()函数中,需要将worker函数的指针作为参数传递,而this指针则用于向worker函数传递threadpool对象的指针。
通过这种方式,就可以让worker函数访问到threadpool对象的所有成员变量和成员函数。
析构函数
主要作用就是停止线程池。删除线程池数组,并回收资源
//实现析构函数
template<typename T>
threadpool<T>::~threadpool(){
delete[] m_threads;//用完之后就把线程池数组删除
m_stop = true;//执行析构函数时将其置为true,供线程判断是否要停止
}
实现工作函数worker
从上面的分析可知,worker函数 会在线程池初始化时被构造函数调用
template<typename T>
void* threadpool<T>::worker(void* arg){
threadpool* pool = (threadpool* )arg;
pool->run();
return pool;
}
该函数主要做的事情就是就是接收一个线程池对象
具体来说, worker函数 从 pthread_create()函数 中得到了一个void类型的指针作为输入参数。
这个指针可以通过 pthread_create() 的最后一个参数(也就是 this )进行传递,即线程创建时调用的arg参数。
什么意思呢?
我们要调用pthread_create()函数创建一个线程,此时我们需要提供线程的存储位置、线程属性参数、新线程的入口函数以及该入口函数所需的参数的指针
在创建线程时,需要传入一个入口函数的指针,用于告诉操作系统新线程应该从哪里开始执行程序代码。在这里,我们将worker函数作为入口函数,以便启动一个新线程,并且让该线程执行线程池的工作函数run()。
也就是说,我们在实例化一个线程池类的时候(假设为A),同时也把一个指向A的指针作为参数传给了worker函数(通过pthread_create()函数),worker函数再调用A中的成员函数run()用于处理任务
由于run()函数被定义为非静态成员函数,无法直接作为入口函数使用,因此我们选择了worker函数作为入口函数,并在其中调用run()函数。在C++中,可以将任何函数作为新线程的入口函数,只要它符合线程函数的格式要求(即返回值为void*类型,参数为void*类型)。在实际编程中,通常会选择一个适当的函数作为入口函数,以实现所需的功能。
实现任务处理函数run
新线程以worker函数为入口进行执行后,会通过指针去调用run()函数,通过循环不断检查任务队列来获取任务(如果有的话)
取到任务之后会调用相应的处理函数进行处理(这里是process(),还没定义)
template<typename T>
void threadpool<T>::run(){
while(!m_stop){
//阻塞等待捕获sem信号量
m_queuestat.wait();
//拿到信号量之后上锁
m_queuelocker.lock();
if(m_workqueue.empty()){
m_queuelocker.unlock();//若队列为空就解锁
continue;
}
//取出队列头部的请求
T* request = m_workqueue.front();
m_workqueue.pop_front();
m_queuelocker.unlock();//解锁
if(!request) continue;//没有东西就继续循环
request->process();//有就调用对应的处理函数
}
}
这里用到了互斥锁与信号量
上锁是为了保证在多线程的情况下,不会出现资源争夺的情况,保证线程安全
信号量的使用则涉及到了服务器整体的设计结构,后面再说(面试重点)
实现添加任务函数append
到目前为止,一个所谓的"线程池"已经基本完工
这个"池"可以创建一个数组存放创建好的线程对象,并维护一个任务队列,从队列中不断检查是否有新任务(外界对服务器的请求)到来
从代码来看,run函数只有在收到信号量时才会去检查队列
那么是谁负责发送(改变)信号量呢?那肯定是负责将任务加入队列的那个部分,也就是append函数了
template<typename T>
void threadpool::append(T* request){
//触发append就意味着有新请求来了,此时需要有线程来处理,所以为了安全要上锁
m_queuelocker.lock();
//判断当前队列中的任务是否已经达到最大请求上限
if(m_workqeue.size() > m_max_requests){
m_queuelocker.unlock();//是就解锁
return false;//添加失败
}
m_workqueue.push_back(request);//往任务队列添加一个请求
m_queuelocker.unlock();
m_queuestat.post();//修改信号量
return true;
}
在向队列添加任务后,append修改了信号量m_queuestat,使得阻塞在wait()处的run函数开始检查队列,获取刚被加入到队列中的任务
至此,线程池的全部功能实现完毕
完整代码
threadpool.h
#ifndef THREADPOOL_H
#define THREADPOOL_H
#include <pthread.h>
#include <list>
#include <stdio.h>
#include "locker.h"
//线程池类,将其定义为模板类是为了代码的复用
//模板参数T就是任务类
template<typename T>
class threadpool {
private:
//线程数量
int m_thread_number;
//线程池数组,大小为m_thread_number
pthread_t * m_threads;//使用pthread_t一是为了性能,二是为了线程安全(相对于vector来说)
//请求队列中最多允许的待处理请求数
int m_max_requests;
//请求队列
std::list<T*> m_workqueue;
//互斥锁
locker m_queuelocker;
//信号量,用于判断是否有任务需要处理
sem m_queuestat;
//是否结束线程
bool m_stop;
private:
//子线程中要执行的代码
static void* worker(void* arg);
void run();
public:
threadpool(int thread_number = 8, int max_request = 10000);
~threadpool();
bool append(T* request);
};
//模板外实现线程池构造函数
template<typename T>//参数列表初始化
threadpool<T>::threadpool(int thread_number, int max_requests):
m_thread_number(thread_number),m_max_requests(max_requests),
m_stop(false), m_threads(NULL){
//异常判断,线程数和最大请求数小于0,报错
if((thread_number <= 0) || (max_requests <= 0)){
throw std:: exception();
}
m_threads = new pthread_t[m_thread_number];//创建线程池数组
if(!m_threads){
throw std:: exception();
}
//创建thread_number个线程,并将它们设置为线程脱离
//线程脱离指的是在一个多线程程序中,某个线程完成了它原本需要执行的任务之后,
//并不立即结束自己的执行,而是继续保持运行状态,直到其他线程也完成了它们的任务之后才退出。
//这种情况下,该线程被称为“脱离线程”(detached thread)
/*线程脱离通常用于需要长时间运行的后台任务,通过将这些任务单独分配给脱离线程来处理,可以避免阻塞主线程和其他相关线程的运行。*/
for(int i = 0; i < thread_number; ++i){
printf("创建第 %d 个线程\n", i);
//C++里面的woker是静态的,所以要传入this来访问类里变量
/*在C++中,对指针进行加减操作会根据指针类型的大小进行调整。
因此,m_threads + i表示将m_threads指针向后偏移i个pthread_t类型的长度,即指向线程池中第i个工作线程的标识符。
m_threads是一个指向pthread_t类型的数组,当使用m_threads[i]时,实际上是对m_threads数组中第i个元素进行访问。
m_threads + i表示对m_threads数组进行偏移,使其指向第i个元素的地址。
在pthread_create()函数中,需要传递一个指向线程标识符的指针作为参数,来保存新建线程的标识符。
因此,可以使用m_threads + i作为该参数,表示将指向第i个工作线程的标识符的地址传递给pthread_create()函数。*/
if(pthread_create(m_threads + i, NULL, worker, this) != 0){//为了让worker访问非静态成员,传入this
delete[] m_threads;
throw std::exception();//创建失败
}
if(pthread_detach(m_threads[i])){//在调用pthread_detach()函数之后,线程将进入“分离”状态,这意味着它不能再被其他线程或主线程等待和加入。
}
}
}
//实现析构函数
template<typename T>
threadpool<T>::~threadpool(){
delete[] m_threads;//用完之后就把线程池数组删除
m_stop = true;//执行析构函数时将其置为true,供线程判断是否要停止
}
//实现append
template<typename T>
bool threadpool<T>::append(T* request){//往队列中添加任务,要保证线程同步
m_queuelocker.lock();//添加互斥锁
if(m_workqueue.size() > m_max_requests){//任务队列大小大于最大请求数
m_queuelocker.unlock();//解锁并报错,此时的任务数已经超出上限
return false;
}
m_workqueue.push_back(request);//往队列中增加一个请求
m_queuelocker.unlock();//解锁
//将请求加入工作队列的操作是需要保证其原子性的,因此需要互斥锁保证多个进程不会争抢
m_queuestat.post();//增加信号量,通知线程池中的线程,有新任务需要处理
return true;
/*当一个新的任务被添加到队列中时,会调用 m_queuestat.post() 增加信号量。
在线程池初始化时,每个工作线程都被创建并阻塞在 m_queuestat.wait() 上等待信号量的触发。
一旦 m_queuestat 的值大于 0,其中的一个线程就会从阻塞状态唤醒并开始处理队列中的请求。*/
}
template<typename T>//线程池的工作函数,其中模板参数T未被使用。该函数是作为新线程启动时调用的入口函数
void* threadpool<T>::worker(void* arg){
// 传入void 类型指针 arg
/*arg 是在启动线程时传递给该线程函数的参数。
以下代码中,它被转换为 threadpool* 类型,因为它实际上是一个指向 threadpool 结构体的指针。
然后,将这个指针赋值给名为 pool 的变量,以便在该函数中访问和操作 threadpool 结构体的成员。*/
threadpool* pool = (threadpool* ) arg;//在pthread_create中传入worker
pool->run();//启动线程池中的一个或多个线程,并将待处理任务提交给线程池进行处理
return pool;
}
template<typename T>
void threadpool<T>::run(){
while(!m_stop){
m_queuestat.wait();//等待append函数传过来的信号量,收到表示需要运行线程池,使用其中的线程处理来处理任务
//可能有数据到了,上锁
/*关于为什么这里要上锁:
收到信号量时,任务队列 m_workqueue 可能为空,也可能不为空,这取决于在等待信号量之前是否有新任务被添加到了队列中。
如果没有新任务被添加,那么 m_workqueue 仍然为空。如果有新任务被添加,那么 m_workqueue 将不为空。
需要注意的是,在多线程编程中,一个线程在等待信号量时,另一个线程可能会往任务队列中添加新任务,因此需要通过加锁(比如互斥锁)来保证对任务队列的访问是线程安全的。
这样可以避免出现竞态条件(race condition,也就是线程不同步),从而确保程序的正确性。
*/
m_queuelocker.lock();
/*在等待信号量的线程执行之前,如果没有任何其他线程向任务队列中添加新的任务,那么收到信号量时 m_workqueue 可能为空。这种情况可以出现在以下几种情况下:
在初始化程序时,创建了一个空的任务队列并等待信号量,此时 m_workqueue 为空。
所有的任务都已经被处理完毕,并且等待信号量的线程尚未收到新的任务添加进来。
等待信号量的线程刚刚完成了处理该任务队列中的所有任务,然后又立即等待信号量,此时 m_workqueue 为空。
*/
if(m_workqueue.empty()){
m_queuelocker.unlock();//解锁
continue;//继续循环,查看队列中是否有数据
}
//取出队列顶部的请求,并将其弹出队列
T* request = m_workqueue.front();
m_workqueue.pop_front();
//取完请求后,解锁
m_queuelocker.unlock();
if(!request){
continue;//没获取到就继续循环
}
//调用任务函数
request->process();
}
}
#endif
locker.h
#ifndef LOCKER_H //没定义就定义一个LOCKER_H
#define LOCKER_H
#include <pthread.h>//互斥锁相关
#include <exception>
#include <semaphore.h>//信号量相关
//线程头部机制的封装类
//互斥锁类
class locker{
private:
pthread_mutex_t m_mutex;//创建一个互斥锁
public:
locker(){//构造函数
if(pthread_mutex_init(&m_mutex, NULL) != 0){//初始化一个互斥锁,默认属性
throw std::exception();//抛出异常
}
}
~locker(){//析构函数,销毁
pthread_mutex_destroy(&m_mutex);
}
bool lock(){//上锁
return pthread_mutex_lock(&m_mutex) == 0;//判断当前线程是否成功获取到了互斥锁 m_mutex。如果返回值为0,则表示当前线程已经成功获取到了该互斥锁;如果返回值不为0,则表示当前线程未能获取到该互斥锁。
}
bool unlock(){
return pthread_mutex_unlock(&m_mutex) == 0;
}
pthread_mutex_t * get(){//获取互斥量
return &m_mutex;
}
};
//条件变量类
//判断队列中有无数据,没有就让线程停着,有就唤醒线程
class cond {
private:
pthread_cond_t m_cond;//创建一个条件变量
public:
cond(){//构造函数
if (pthread_cond_init(&m_cond, NULL) != 0) {
throw std::exception();
}
}
~cond() {//析构函数
pthread_cond_destroy(&m_cond);
}
bool wait(pthread_mutex_t *m_mutex) {
int ret = 0;
ret = pthread_cond_wait(&m_cond, m_mutex);
return ret == 0;
}
bool timewait(pthread_mutex_t *m_mutex, struct timespec t) {//超时
int ret = 0;
ret = pthread_cond_timedwait(&m_cond, m_mutex, &t);
return ret == 0;
}
bool signal() {//唤醒一个或多个线程
return pthread_cond_signal(&m_cond) == 0;
}
bool broadcast() {//唤醒所有线程
return pthread_cond_broadcast(&m_cond) == 0;
}
};
//信号量类
class sem{
private:
sem_t m_sem;
public:
sem(){
if(sem_init(&m_sem, 0, 0) != 0){
throw std:: exception();
}
}
~sem(){
sem_destroy(&m_sem);
}
//等待信号量
bool wait(){
return sem_wait(&m_sem) == 0;
}
//增加信号量
bool post(){
return sem_post(&m_sem) == 0;
}
};
#endif

 浙公网安备 33010602011771号
浙公网安备 33010602011771号