


我发现我好菜啊,带点正经数学的东西就会寄...
1. 三角函数:
1.1 三角函数的定义:
首先是锐角三角函数:
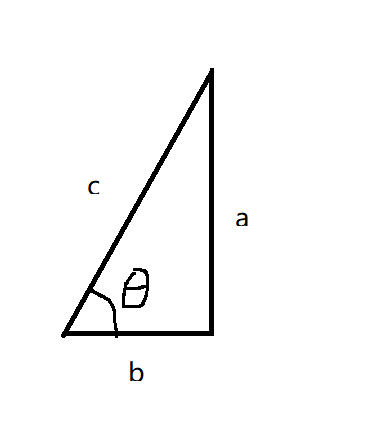
定义:
-
\(\sin \theta=\frac{a}{c}\),即“对边比斜边”。
-
\(\cos \theta=\frac{b}{c}\),即“邻边比斜边”。
-
\(\tan \theta=\frac{a}{b}\),即“对边比邻边”。
我们可以把三角函数扩充到任意角:
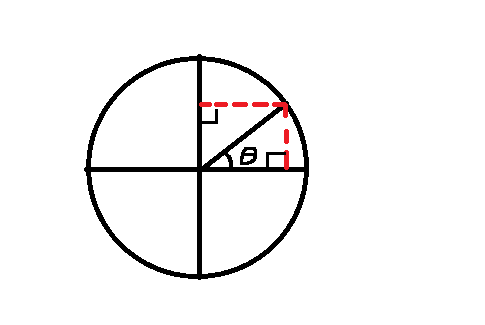
我们把角放在单位圆(半径为 \(1\) 的圆)上。
然后角 \(\theta\) 的上面那条射线,和单位圆的交点,我们记作 \(A(x,y)\),那么 \(\sin \theta=y,\cos \theta=x,\tan \theta=\frac{y}{x}\)。
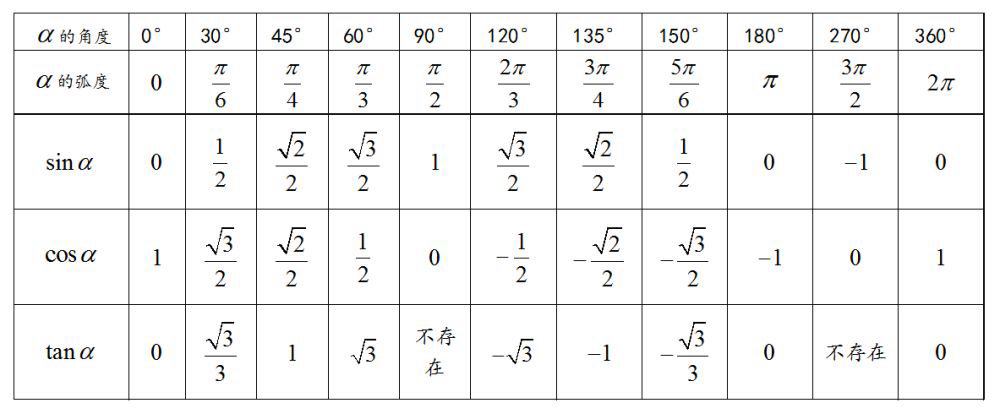
1.2 常用的三角函数值:
不多说了,贴图:
1.3 三角函数的性质与运算:
1.3.1
根据三角函数的定义可知,\(\tan \theta=\frac{\sin \theta}{\cos \theta}\),另外,\(\sin -\theta=-\sin \theta,\cos -\theta=\cos \theta\)。
另外,根据勾股定理可得(看上面的图那个单位圆):\(\sin^2 \theta+\cos^2\theta=1\)。
1.3.2 诱导公式
口诀:“奇变偶不变,符号看象限”(都被玩烂了...)
来解释一下含义,就是研究 \(\frac{k\pi}{2}+\theta\) 的三角函数和 \(\theta\) 的三角函数之间的关系。
-
奇变偶不变:当 \(k\) 是奇数,那么如果以前是 \(\sin \theta\),就会等于 \(\cos \frac{k\pi}{2}+\theta\),反之亦然。
-
符号看象限:我们默认 \(\theta\) 为第一象限角,然后看它转 \(\frac{k\pi}{2}\) 度后所在的那个象限。比如说如果是 \(\sin\),然后 \(k=2\),那么最后在第一象限,纵坐标是相反的,所以有 \(\sin \pi+\theta=-\sin \theta\)。
这两条结合在一起,前半部分决定 \(+\frac{k\pi}{2}\) 后是 \(\sin\) 还是 \(\cos\),后半部分决定符号。
1.3.3 和差角公式:
我老是背了又忘...直接放公式吧:
-
\(\sin (\alpha + \beta)=\sin \alpha \cos \beta+\cos \alpha \sin \beta\)。
-
\(\cos (\alpha + \beta)=\cos \alpha \cos \beta-\sin \alpha \sin \beta\)。
-
\(\tan (\alpha + \beta)=\frac{\tan \alpha + \tan \beta}{1-\tan \alpha\tan \beta}\)。
这三个只能记了,没有别的方法,刷熟练度。至于差角,把 \(-\beta\) 看作 \(+(-\beta)\) 然后根据 1.3.1 去套和角公式就好(不用记符号的变化了嘿嘿)。
有了这个你可以做一道水题:区间加区间sin和
1.4 三角形上的三角函数:
对于 \(\triangle ABC\),我们记角 \(A,B,C\) 的对边分别为 \(a,b,c\)。
-
\(S_{\triangle ABC}=\frac{1}{2}ab\cdot \sin C\)。
-
正弦定理: \(\frac{a}{\sin A}=\frac{b}{\sin B}=\frac{c}{\sin C}=2R\),其中 \(R\) 是 \(\triangle ABC\) 的外接圆半径。
-
余弦定理: \(a^2=b^2+c^2-2bc\cdot \cos A\)(变形:\(\cos A=\frac{b^2+c^2-a^2}{2bc}\))。
2. 向量:
2.1 基本性质:
\(\vec{AB}=\vec{CB}-\vec{CA}\)(通过 \(\vec{CA}+\vec{AB}=\vec{CB}\) 得到)
判定两向量共线:两向量 \(\alpha,\beta\) 共线,当且仅当,存在实数 \(\lambda\),满足 \(\alpha=\lambda\beta\)。
判定三点共线:三点 \(A,B,C\) 共线,当且仅当,存在实数 \(\lambda\),满足 \(\vec{OA}=\lambda\vec{OB}+(1-\lambda)\vec{OC}\)。
平面向量基本定理:一个平面上,两个不共线的向量的线性组合可以表示出该平面上全体向量,这两个向量称为该平面上的一组基(其实是线代的基本理论吧)。
如果两个平面向量垂直,那么他们正交。用一组正交向量构成积去表示向量,就是正交分解。
我们可以用 \([a,b]\) 表示一个从 \((0,0)\rightarrow (a,b)\) 的平面向量,显然平面上向量和实数对一一对应。
2.2 向量乘法:
2.2.1 向量点乘(内积):
定义 \(a=[a_1,a_2],b=[b_1,b_2]\),则向量点积定义为 \(a\cdot b=a_1b_1+a_2b_2\),我们发现内积是一个标量,不是一个向量。
有趣的是,点积还有一种写法:\(a\cdot b=|a||b|\cdot \cos \theta\),其中 \(\theta\) 是 \(a,b\) 两向量夹角。
换言之我们得到 \(a_1b_1+a_2b_2=|a||b|\cdot \cos \theta\)。所以我们有时候求 \(\cos \theta\),可以尝试把 \(\theta\) 写成两个向量的夹角。
向量的内积是有几何意义的:\(a\cdot b\) 的几何意义是向量 \(a\) 在向量 \(b\) 上的投影乘上向量 \(b\) 的模长(或向量 \(b\) 在向量 \(a\) 上的投影乘上向量 \(a\) 的模长)。什么叫投影:
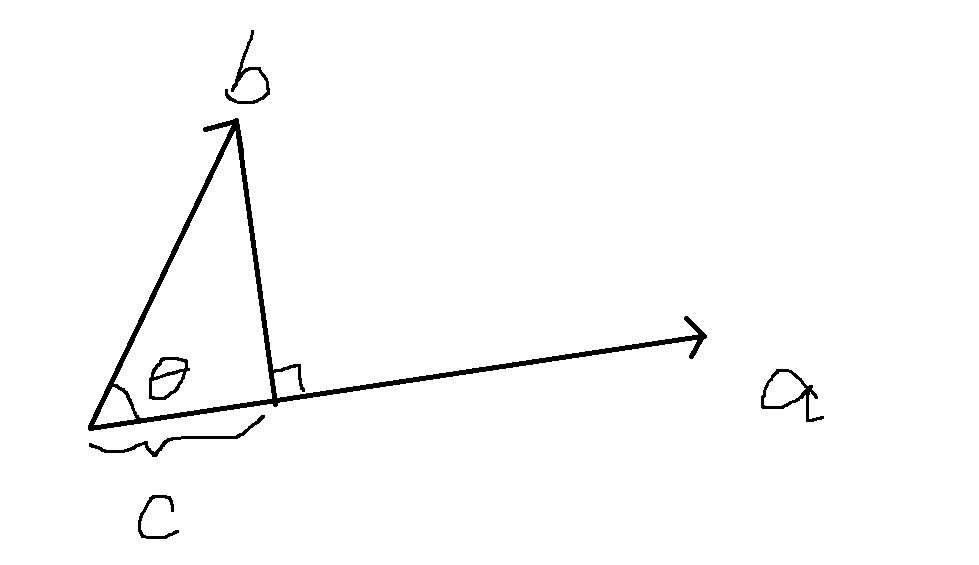
\(c\) (注意 \(c\) 是个标量)就是 \(b\) 在 \(a\) 上的投影。
那么我们注意到 \(\cos \theta=\frac{c}{|b|}\),所以 \(c=|b|\cos \theta\)。那么 \(a\cdot b=|a||b|\cos \theta\) 就是 \(a\) 的模长乘上 \(b\) 在 \(a\) 上的投影。
我们发现研究投影的正负,可以判断夹角 \(\theta\) 是锐角、直角、还是钝角,而 \(|b|\) 是正数,乘上后不影响正负性质,换言之我们可以直接通过 \(a\cdot b\) 的值判断 \(a,b\) 夹角 \(\theta\) 的类别:
-
\(a\cdot b\gt 0\Leftrightarrow 0\lt \theta\lt \frac{\pi}{2}\)。
-
\(a\cdot b=0\Leftrightarrow \theta=\frac{\pi}{2}\)。
-
\(a\cdot b\lt 0\Leftrightarrow \frac{\pi}{2}\lt \theta \lt \pi\)。
另外,通过向量点乘可以推出 \((\vec{c})^2=|\vec{c}|^2\),即向量平方数值上就是模长平方。
2.2.2 向量叉乘(外积):
感觉这个以我水平理解还是有点困难。
定义向量叉积 \(\vec{c}=\vec{a}\times \vec{b}\)。\(\vec{c}\) 的模长是 \(\vec{a}\) 和 \(\vec{b}\) 所围成的平行四边形面积,即 \(|\vec{a}||\vec{b}|\cdot\sin \theta\)。
\(\vec{c}\) 会与 \(a,b\) 所在平面垂直(因为都从原点出发,所以不可能异面)。而具体那个方向是遵守右手法则的。就是右手四根手指对向 \(\vec{a}\),然后你看能否通过弯曲让这四根手指弯向 \(\vec{b}\),如果不行就把手上下转一下。最后拇指朝向的方向就是叉积向量的方向。
内积的运算,该有的乘法运算律都满足,而叉积不一样:
-
\(\vec{a}\times \vec{b}=-\vec{b}\times \vec{a}\)。
-
\(\vec{a}\times (\vec{b}+\vec{c})=\vec{a}\times \vec{b}+\vec{a}\times \vec{c}\)。
-
\((\lambda\vec{a})\times \vec{b}=\lambda(\vec{a}+\vec{b})=\vec{a}\times(\lambda\vec{b})\)。
发现没有结合律,特别需要注意。
另外,还有一个著名的性质:
\(\vec{a}\times(\vec{b}\times\vec{c})+\vec{b}\times(\vec{c}\times\vec{a})+\vec{c}\times(\vec{a}\times\vec{b})=\vec{0}\)。
好像研究代数结构的时候这个性质很有用。先咕了。
另外我们来讲讲怎么计算叉乘(三维向量):
就是我们设 \(x,y,z\) 方向的单位向量是 \(i,j,k\),那么实际上就是计算行列式:
\(\left |\begin{array}{cccc} i &j &k \\ a_1 & a_2 & a_3 \\ b_1 & b_2 & b_3 \\ \end{array}\right|=(a_2b_3-a_3b_2)i+(a_3b_1-a_1b_3)j+(a_1b_2-a_2b_1)k\)。
然后这个东西可以自然地放在二维去考虑:\(\vec{a}\times\vec{b}=|\vec{a}|\vec{b}|\cdot \sin \theta\) 是我们众所周知的,但是这不意味着二维向量叉乘得到的就是标量,它本质上还是一个向量:只不过两个向量的第三维都为 \(0\),所以得到的结果向量的前两维都是 \(0\),所以那个虚假的标量实际上代表的是结果向量的 \(z\) 坐标(而 \(x,y\) 坐标就是 \((0,0)\))。
3. 矩阵
基础的矩阵加法、乘法,还有高斯消元的内容不再赘述。
3.1. 左行右列定理:
首先,一般地我们记 \(n\) 阶单位矩阵为 \(I_{n}\)。考虑一个 \(n\times m\) 矩阵 \(A\),容易发现,\(I_n\times A=A\times I_{m}=A\)。
我们考虑一个矩阵 \(A\):
我们已经知道了它左边乘上 \(I_{2}\),或者右边乘上 \(I_{3}\),得到的还是 \(A\)。我们现在把 \(I_{2}\) 的两行交换一下,然后左乘 \(A\),看看会发生什么事情:
我们发现,结果矩阵中,\(A\) 的两行也被交换了。我们再把 \(I_{3}\) 的前两列交换,然后右乘 \(A\):
我们发现,结果矩阵中,\(A\) 的前两列被交换了。
发现了没有,乘上单位矩阵是不变的,当我交换单位矩阵的行/列的时候,结果矩阵也变成了 \(A\) 交换行/列的结果。
我们还可以进行类似的尝试,比如把单位矩阵上某个 \(1\) 改为 \(\lambda\),然后左乘 \(A\),那么你会发现对应行是原来 \(A\) 中这一行的 \(\lambda\) 倍。或者说在第 \(2\) 行第 \(1\) 列也写上一个 \(1\),变成 \(\left(\begin{array}{ll}1 & 0 \\ 1 & 1 \end{array}\right)\) 然后左乘 \(A\),那么我们会发现第一行还是 \(A\) 的第一行,而第二行变成了原本 \(A\) 的第一行加上第二行。
我们可以根据矩阵乘法的定义得到结论,当 \(A\) 左乘一个矩阵后,结果矩阵的每一行,都是 \(A\) 的各行的线性组合;同理当 \(A\) 右乘一个矩阵后,结果矩阵的每一列,都是 \(A\) 的各列的线性组合,也就是所谓的“左行右列”定理。我们试举一个例子,更好地说明这个事实(这个定理非常重要,一定要理解):
设 \(A=\left(\begin{array}{ll}1&1&4\\5&1&4\end{array}\right),B=\left(\begin{array}{ll}1&9\\1&9\\8&10\end{array}\right)\),那么考虑 \(A\times B\) 的结果:
结果的第一行满足:
同理,结果的第二行满足:
换言之,如果 \(A\) 有 \(n\) 行,结果矩阵 \(C\) 就有 \(n\) 行,而第 \(i\) 行就是以 \(A_{i,1},A_{i,2},...,A_{i,m}\) 为权的 \(B\) 的 \(m\) 个行向量的线性组合。
同理,如果 \(B\) 有 \(p\) 列,结果矩阵 \(C\) 就有 \(p\) 列,而第 \(i\) 列就是以 \(B_{1,i},B_{2,i},...,B_{m,i}\) 为权的 \(A\) 的 \(m\) 个列向量的线性组合。
“左行右列”是我们理解矩阵乘法的又一种方式。
我们回到初等行(列)变换,我们发现,一个矩阵 \(A\) 经过一次初等行变换得到的矩阵 \(B\),那么 \(B\) 的每一行显然可以都表示成 \(A\) 的行向量线性组合。同理如果矩阵 \(A\) 经过一次初等列变换得到的矩阵 \(B\),那么 \(B\) 的每一列都可以分别表示成 \(A\) 的所有列向量的线性组合。
所以我们可以通过 \(A\leftarrow C\times A\) 的方法,对 \(A\) 进行行变换。同理可以通过 \(A\leftarrow A\times C\) 的方法对其进行列变换。接下来我们仅讨论行变换:
首先,设 \(A\) 为 \(n\) 行 \(m\) 列,那么 \(C\) 应该基于 \(I_{n}\) 得到。如果我们想让 \(A\) 进行一次行变换,我们把这个行变换执行在 \(C\) 上然后去左乘 \(A\) 即可。
这样,我们设执行 \(k\) 次,每次的矩阵分别为 \(C_1,C_2,...,C_p\),那么 \(A\) 可以通过 \(p\) 次矩阵乘法实现 \(p\) 次初等行变换:
矩阵乘法具有结合律,可以重新改写成:
左乘一个 \(C_i\),相当于对被乘矩阵执行一次第 \(i\) 次的行变换。所以上式中那 \(p\) 个矩阵的乘积,相当于单位矩阵,依次执行 \(p\) 次行变换的结果。
说白了就是我们乘矩阵不一定只能达到“一次行变换”的效果,它可以拓展的,不管对 \(A\) 进行多少次初等行变换,你直接按操作的顺序,在 \(C=I_{n}\) 上执行相同的变换,最后 \(A\leftarrow C\times A\) 就是行变换后的结果。
这个技巧在 矩阵求逆 模板中就有用到。
应用:利用“左行右列”证明 \((AB)^{T}=B^T\times A^T\):
我们知道,转置的意思是,\(A\) 的第 \(i\) 行变成 \(A^T\) 的第 \(i\) 列,\(A\) 的第 \(i\) 列变成 \(A^T\) 的第 \(i\) 行。同时有 \((A^T)^T=A,(A+B)^T=A^T+B^T,(\lambda A)^T=\lambda(A^T)\) 三个性质成立,但是多个矩阵乘积的转置是不能直接拆开来的,它是倒过来的:\((\prod_{i=1}^{n}A_{i})^T=\prod_{i=n}^{1}A_{i}^T\),为了证明这个,我们只需要证明 \((AB)^T=B^T\times A^T\),然后利用矩阵乘法的结合律就可以推广了。
我们考虑研究 \((AB)^T\) 和 \(B^T\times A^T\) 的每一行是否相等,因为我们容易证明它们至少大小是一致的。
根据左行右列定理:\((AB)^T\) 的第 \(i\) 行 \(\Leftrightarrow\) \(AB\) 的第 \(i\) 列 \(\Leftrightarrow\) 以 \(B\) 的第 \(i\) 列为权,\(A\) 的各列的线性组合。
而 \(B^T\times A^T\) 的第 \(i\) 行 \(\Leftrightarrow\) 以 \(B^T\) 的第 \(i\) 行为权,\(A^T\) 各行的线性组合 $\Leftrightarrow $ 以 \(B\) 的第 \(i\) 列为权,\(A\) 的各列的线性组合。
所以 \((AB)^T\) 和 \(B^T\times A^T\) 的每一行都是相等的,它们自然相等。

