
学习老算法,争做老东西
带撤销并查集
只是来贴个板子,没什么好讲的。
带撤销并查集
struct DSU
{
int n=0,tot=0,fa[MAXN],siz[MAXN],s[MAXN];
void ins() { n++,fa[n]=n,siz[n]=1; }
int get(int x) { return fa[x]==x?x:get(fa[x]); }
void merge(int x,int y)
{
x=get(x),y=get(y);
if (x==y) return;
if (siz[x]<siz[y]) swap(x,y);
s[++tot]=y,fa[y]=x,siz[x]+=siz[y];
}
void undo()
{
if (!tot) return;
int y=s[tot--];
siz[fa[y]]-=siz[y];
fa[y]=y;
}
void back(int t=0) { while (tot>t) undo(); }
};
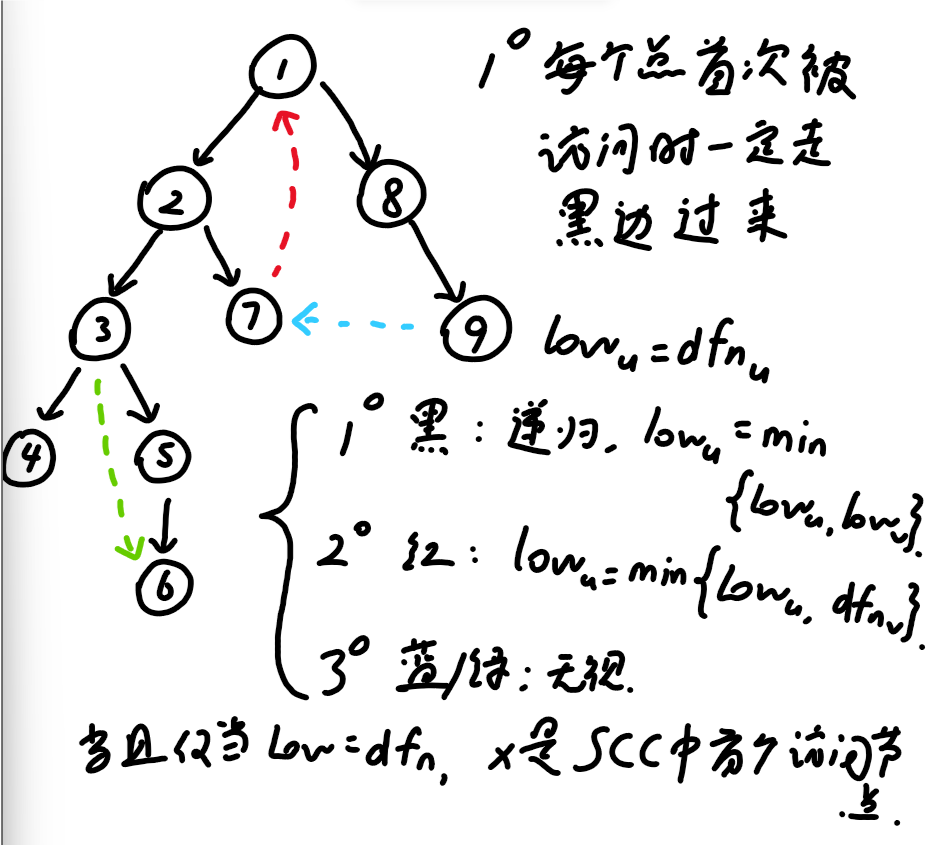
Tarjan
SCC
SCC
struct SCC
{
int n,cur,cnt;
vector<vector<int>> adj;
vector<int> stk,dfn,low,bel;
SCC() {}
SCC(int n) { init(n); }
void init(int n)
{
this->n=n;
adj.assign(n,{});
stk.clear();
dfn.assign(n,-1);
low.resize(n);
bel.assign(n,-1);
cur=cnt=0;
}
void add(int u,int v) { adj[u].push_back(v); }
void dfs(int x)
{
dfn[x]=low[x]=cur++;
stk.push_back(x);
for (auto y:adj[x])
{
if (dfn[y]==-1)
{
dfs(y);
low[x]=min(low[x],low[y]);
}
else if (bel[y]==-1) low[x]=min(low[x],dfn[y]);
}
if (dfn[x]==low[x])
{
int y;
do
{
y=stk.back();
bel[y]=cnt;
stk.pop_back();
} while (y!=x);
cnt++;
}
}
vector<int> work()
{
for (int i=0;i<n;i++)
if (dfn[i]==-1) dfs(i);
return bel;
}
};
线性筛积性函数
这一做法仅限于能在 \(\mathcal{O}(\ln n)\) 时间内计算任意一个 \(f(p^m)\) 的数论函数。
维护这样一个函数 \(g\),欧筛中筛去 i*pri[j] 时:
-
若
i%pri[j]==0则g[i*pri[j]]=g[i]*pri[j]。 -
否则,
g[i*pri[j]]=p。
那么当且仅当 \(n\) 为某质数的幂时,\(n=g_n\),这些位置的 \(f\) 我们在 \(\mathcal{O}(\ln{n})\) 时间内计算,其余位置根据积性函数性质计算,即可在 \(\mathcal{O}(n)\) 时间内得到 \(f\) 的前 \(n\) 项。
数论分块
考虑这样一个问题:求 \(\sum_{i=1}^nf(i)\lfloor\frac{n}{i}\rfloor\),我们默认此处的 \(f(i)\) 已知。
暴力做是 \(\mathcal{O}(n)\) 的,但题目中往往需要一个 \(\mathcal{O}(\sqrt{n})\) 的做法。
当 \(1 \leq i \leq \sqrt{n}\) 时,这部分我们暴力解决即可。
当 \(i \geq \sqrt{n}\) 时,有 \(1 \leq \lfloor\frac{n}{i}\rfloor \leq \sqrt{n}\),如果我们对 \(f(i)\) 先做前缀和,便可以对 \(\lfloor\frac{n}{i}\rfloor\) 相同的 \(i\) 打包整块求和。
现在问题是,怎样 \(\mathcal{O}(1)\) 地找到当前块的终点/下一块的起始点。
幸运地,我们有下面的发现:
-
\(\lfloor\frac{n}{\lfloor\frac{n}{\lfloor\frac{n}{i}\rfloor}\rfloor}\rfloor \geq \lfloor\frac{n}{\frac{n}{\lfloor\frac{n}{i}\rfloor}}\rfloor = \lfloor\frac{n}{i}\rfloor \geq \lfloor\frac{n}{\lfloor\frac{n}{\frac{n}{i}}\rfloor}\rfloor \geq \lfloor\frac{n}{\lfloor\frac{n}{\lfloor\frac{n}{i}\rfloor}\rfloor}\rfloor \to \lfloor\frac{n}{\lfloor\frac{n}{\lfloor\frac{n}{i}\rfloor}\rfloor}\rfloor = \lfloor\frac{n}{i}\rfloor\)
-
\(i = \lfloor\frac{n}{\frac{n}{i}}\rfloor \leq \lfloor\frac{n}{\lfloor\frac{n}{i}\rfloor}\rfloor\)
所以 \(i\) 与 \(\lfloor\frac{n}{\lfloor\frac{n}{i}\rfloor}\rfloor\) 同块,且后者是块的右端点。
$f(i)=1$ 的模板
int H(int n)
{
int ret=0;
for (int l=1,r;l<=n;l=r+1)
{
r=n/(n/l);
ret+=(r-l+1)*(n/l);
}
return ret;
}
数论分块问题往往要注意:是否需要开 long long。
做多维复杂度不变,但要注意 l 上界只能取到 min(n,m),偷懒写 n 在 \(n \leq m\) 时会 RE。
实际上对上述问题一个更加自然的想法是:根号两边的值会相等,我们只算根号内的那部分,翻倍后减去重合的部分(即容斥处理)。
考虑更一般的情况,比如计算一个平凡的 \(\text{Dirichlet}\) 卷积。
我们只需各取两维在 \(\mathcal{\sqrt{n}}\) 内的贡献,再减去重复部分。这种做法也叫 \(\text{Dirichlet}\) 双曲线法,后面在杜教筛中会提到,它与数论分块仅仅相差一个分部求和。
多维数论分块
int H(int n)
{
int ret=0;
for (int l=1,r;l<=min(n,m);l=r+1)
{
r=min(n/(n/l),m/(m/l));
ret+=(r-l+1)*(n/l)*(m/l);
}
return ret;
}
莫比乌斯反演
狄利克雷说:$ \mu \ast 1 = \varepsilon $,然后便有了莫比乌斯反演。
若 \(f(n)=\sum_{d|n}g(d)\),称 \(f(n)\) 是 \(g(n)\) 的莫比乌斯变换。
由 \(g=g \ast \varepsilon=g \ast 1 \ast \mu=f \ast \mu\) 知,\(g(n)=\sum_{d|n}\mu(d)f(\frac{n}{d})\),称 \(g(n)\) 是 \(f(n)\) 的莫比乌斯反演。
通常还是直接使用 \(\mu \ast 1 = \varepsilon\) 将 \([n=1]\) 转为 \(\sum_{d|n}\mu(d)\),下面是一个例子。
预处理后便可 \(\mathcal{O}(\sqrt{n})\) 应答上式。
欧拉反演
狄利克雷又说:\(\mu \ast \text{id} = \varphi\),便有了欧拉反演。
于是我们可以对一些 \(\gcd\) 相关的式子进行化简,下面是一个例子:
预处理后便可 \(\mathcal{O}(\sqrt{n})\) 应答上式。
常用结论
\[\lfloor\frac{\lfloor\frac{n}{i}\rfloor}{j}\rfloor=\lfloor\frac{n}{ij}\rfloor\ \ \ (n,i,j \in \mathbb{Z}^{+}) \]
\[d(ij)=\sum_{x|i}\sum_{y|j}[(x,y)=1] \]
\[\ln(n+1)-\ln{n} < \frac{1}{n} < \ln{n}-\ln(n-1) \]\[\mathcal{O}(\sum_{i=1}^{n}\frac{n}{i})=\mathcal{O}(n \ln{n}) \]
杜教筛
杜教筛、PN 筛、Min_25 筛、洲阁筛均用于筛出一些复杂的数论函数。
对已知块筛的函数 \(f,g\),杜教筛可以在 \(\mathcal{O}(n^{\frac{2}{3}})\) 时间内得到 \(f / g\) 的块筛。
如果你是第一次接触杜教筛,恐怕你也不知道块筛是什么,我想我们还是有必要进行一些前置知识的介绍。
整除集合
对一个正整数 \(n\),我们称 \(D_n=\{\lfloor\frac{n}{m}\rfloor|m \in \mathbb{Z}^{+}\}\) 为它的整除集合,它的基数是 \(\mathcal{O}(\sqrt{n})\) 的。
块筛
对数论函数 \(f\),它在所有 \(x \in D_n\) 位置上的前缀和称为它在 \(n\) 处的块筛,即 \(\{Sf(x)|x \in D_n\}\)。
有时我们只需要求某个 \(Sf(n)\),但 \(n\) 可能会很大,以至于我们不能接受线性的时间复杂度。
而 \(Sf(n)\) 不能凭空得到,我们便退而求其次,试着求 \(f\) 的块筛,因为 \(Sf(n)\) 往往与 \(n\) 整除集合内其他位置的 \(Sf\) 存在递推关系。
Dirichlet 双曲线法
考虑这样一个问题:
已知 \(f,g\) 块筛,求 \(f \ast g\) 块筛。
最后一步就像求 \(\int_{0}^{+\infty}\frac{k}{x}dx\) 时,可以先对 \(\sqrt{k}\) 以内的部分积分,翻倍后减去 \(k\)(即那个边长为 \(\sqrt{k}\) 的正方形)一样。
我想这就是他叫“双曲线法”的原因。(感觉更像是二元的容斥)
取 \(x=y=\sqrt{n}\),暴力求块筛,时间复杂度为:
若对 \(m\) 以内部分线性预处理,复杂度将变为 \(\mathcal{O}(m+\frac{n}{\sqrt{m}})\)。
故常取 \(m=n^{\frac{2}{3}}\),使得总时间复杂度同样为 \(\mathcal{O}(n^{\frac{2}{3}})\)。
有一说一,不如数论分块。
但在另一个问题上,它将大显身手。
杜教筛
考虑这样一个问题:
已知 \(g,h\) 块筛,求 \(h / g\) 块筛。
注意前面我们得到了这样一个式子:
令 \(j=1\) 并移项可得:
从小到大枚举整除集合位置即可求得 \(f\) 的块筛,把 \(h\) 视为 \(f \ast g\),即得到 \(h / g\) 的块筛。
本质还是对整除集合位置使用 \(\text{Dirichlet}\) 双曲线法,时间复杂度同上。
杜教筛模板
#include <bits/stdc++.h>
using namespace std;
#define ll long long
const int N=2e6,MAXN=N+7;
int tot,mu[MAXN],smu[MAXN],Smu[MAXN],p[MAXN];
bool vis[MAXN];
void init()
{
mu[1]=1;
for (int i=2;i<=N;i++)
{
if (!vis[i]) mu[i]=-1,p[++tot]=i;
for (int j=1;(j<=tot)&&(i*p[j]<=N);j++)
{
vis[i*p[j]]=1;
if (i%p[j]==0) break;
mu[i*p[j]]=-mu[i];
}
}
for (int i=1;i<=N;i++) smu[i]=smu[i-1]+mu[i];
}
inline ll Sg(int x) { return (x+1ll)*x>>1; }
void solve(int n)
{
int sq=sqrt(n);
for (int i=n/N+1;i<=sq;i++) Smu[i]=smu[n/i];
for (int i=n/N;i;i--)
{
int m=sqrt(n/i),ret;
ret=1+smu[m]*m-n/i;
for (int j=2;j<=m;j++)
{
int x=i*j,y=n/i/j;
ret-=y*mu[j];
if (x>sq) ret-=smu[y];
else ret-=Smu[x];
}
Smu[i]=ret;
}
ll Sphi=-Sg(sq)*smu[sq];
for (int i=1;i<=sq;i++) Sphi+=1ll*i*Smu[i]+mu[i]*Sg(n/i);
cout<<Sphi<<' '<<Smu[1]<<'\n';
}
int main()
{
init();
int T;
cin>>T;
while (T--)
{
int x;
cin>>x;
solve(x);
}
return 0;
}
Dancing Links
考虑这样一个问题:
给定一个 \(N\) 行 \(M\) 列的矩阵,矩阵中每个元素要么是 \(1\),要么是 \(0\)。
你需要在矩阵中挑选出若干行,使得对于矩阵的每一列 \(j\),在你挑选的这些行中,有且仅有一行的第 \(j\) 个元素为 \(1\)。
我们容易得到如下所示的一个想法:
-
枚举选择一行,并将其从矩阵中删除。(不重复决策)
-
对上一步删除的行内的每个 \(1\),将其所在列删除。(对应列为 \(1\) 的行已确定,可以剪枝)
-
对上一步删除的列内的每个 \(1\),将其所在行删除。(避免决策出现某列有多个 \(1\) 的情形)
-
若操作后矩阵不为空,回到步骤 1。
-
若操作后矩阵为空,但最后一次决策行中元素不全为 \(1\),回溯并回到步骤 1。
-
若操作后矩阵为空,且最后一次决策行中元素全为 \(1\),则找到问题的一组解。
不难发现,每个 \(1\) 都是对问题的一个约束;但 \(0\) 只是对矩阵形式上的补足,缺乏实际意义。
所以在实际的精确覆盖问题中,\(0\) 的数量往往远多于 \(1\) 的数量。(以数独问题为例,一个决策中 \(0\) 的个数是数独边长的平方级,而 \(1\) 总是仅有四个)
如果直接使用二维数组模拟这个过程,每个 \(0\) 都要占据空间,空间复杂度通常很糟糕。
所以我们想到,可以用一个动态开点的数据结构,仅维护 \(1\) 的相关信息。
放心,这里并没有什么扫兴的根号和 \(\log\),我们用链表就够了。(大概是高德纳最平易近人的想法)
对每个 \(1\),它沿一个链表遍历过所有与它同列的 \(1\),沿另一个链表遍历过所有与它同行的 \(1\),也就是双向十字链表。(其实可以看成略去那些 \(0\) 之后的网格图,但首尾相接以便遍历)
最后加上一个重要剪枝:总是先解决 \(1\) 最少的状态。剩下的其实就是对上述流程的模拟了。
DLX 模板
#include <bits/stdc++.h>
using namespace std;
const int MAXN=250007;
int n,m,cnt,ans,seq[MAXN],dcs[MAXN],sta[MAXN],siz[MAXN],first[MAXN];
int U[MAXN],D[MAXN],L[MAXN],R[MAXN];
void build()
{
for (int i=0;i<=m;i++)
{
L[i]=i-1,R[i]=i+1;
U[i]=D[i]=i;
}
L[0]=m,R[m]=0,cnt=m;
}
void ins(int d,int s)
{
cnt++,siz[s]++;
dcs[cnt]=d,sta[cnt]=s;
U[cnt]=s,D[cnt]=D[s];
U[D[s]]=cnt,D[s]=cnt;
if (!first[d]) first[d]=L[cnt]=R[cnt]=cnt;
else
{
L[cnt]=first[d],R[cnt]=R[first[d]];
L[R[first[d]]]=cnt,R[first[d]]=cnt;
}
}
void remove(int s)
{
L[R[s]]=L[s],R[L[s]]=R[s];
for (int i=D[s];i!=s;i=D[i])
for (int j=R[i];j!=i;j=R[j])
U[D[j]]=U[j],D[U[j]]=D[j],siz[sta[j]]--;
}
void recover(int s)
{
for (int i=U[s];i!=s;i=U[i])
for (int j=L[i];j!=i;j=L[j])
U[D[j]]=D[U[j]]=j,siz[sta[j]]++;
L[R[s]]=R[L[s]]=s;
}
bool dance(int dep)
{
if (!R[0])
{
ans=dep;
return 1;
}
int s=R[0];
for (int i=s;i!=0;i=R[i])
if (siz[i]<siz[s]) s=i;
remove(s);
for (int i=D[s];i!=s;i=D[i])
{
seq[dep]=dcs[i];
for (int j=R[i];j!=i;j=R[j])
remove(sta[j]);
if (dance(dep+1)) return 1;
for (int j=L[i];j!=i;j=L[j])
recover(sta[j]);
}
recover(s);
return 0;
}
int main()
{
cin>>n>>m;
build();
for (int i=1;i<=n;i++)
for (int j=1;j<=m;j++)
{
int x;
cin>>x;
if (x) ins(i,j);
}
if (dance(1))
for (int i=1;i<ans;i++)
cout<<seq[i]<<' ';
else puts("No Solution!");
return 0;
}
我们对上面形式化的题意具体化:
-
原来矩阵中的横行代表一个决策。
-
原来矩阵中的竖列代表一个状态。
-
问题等价于:选择部分决策,使其精确覆盖每个状态。(即每个状态对应一个决策)
这便是这类问题的共性,故我们将其统称为精确覆盖问题。
对于常见的数独游戏,实际上也能通过适当的建模将其转化为精确覆盖问题:
-
三元组 \((行,列,数)\) 代表一个决策。
-
二元组 \((行,数),(列,数),(宫,数),(行,列)\) 均代表状态,对应数独规则:
每行中每个数都恰好出现一次。
每列中每个数都恰好出现一次。
每宫中每个数都恰好出现一次。
每格中恰好填一个数。
口算一下,对于 \(9 \times 9\) 数独,决策数有 \(9^3=729\) 个,状态数有 \(4 \times 9^2=324\) 个。
而每个决策中,\(1\) 的数目固定为四个,\(0\) 的数目为 \(324-4=320\) 个,也应证了前面对 \(0/1\) 数量规模的分析。
至于时间复杂度,很抱歉,尽管它做了许多优化,这依然是一个指数级时间复杂度的算法。
但精确覆盖问题是一个 NPC 问题,这意味着除去对矩阵精心构造的情形(矩阵极小且 \(1\) 占比极大),DLX 基本是这个问题下的最优解。
