
机器学习线性模型
线性模型
最小二乘法(LMS)
数理推导
给定数据 \(D={(x^{(1)},y^{(1)}),(x^{(2)},y^{(2)}),...,(x^{(N)},y^{(N)})}\) ,\(h_{\theta}(x)=\theta^T x=\theta_0x_0+\theta_1x_1+...+\theta_nx_n=\theta_0+\theta_1x_1+...+\theta_nx_n\)
给定 \(N\) 组数据:
求解 \(\theta\),使得输入 \(x\),得到 \(\widehat{y}\)与\(y\)尽可能相似。求解线性方程组。
\(\Rightarrow 求解A \theta = Y\),使得\(A \theta\)尽可能拟合\(Y\)
最优解即:
因为 \(\frac{d(u^Tv)}{dx}=\frac{du^T}{dx}v+\frac{dv^T}{dx}u\)
所以 \(\frac{d(x^Tx)}{dx}=\frac{dx^T}{dx}x+\frac{dx^T}{dx}x=2x\)
进一步 \(\frac{d(x^TBx)}{dx}=\frac{dx^T}{dx}Bx+\frac{dx^TB^T}{dx}x=Bx+B^Tx=(B+B^T)x\quad B是方阵\)
应用到方程中,将 \(A^TA\) 对应方阵 \(B\),则 \(\frac{\partial S}{\partial \theta}=2A^TA\theta-2A^TY=0\quad \Rightarrow A^TA\theta = A^TY\)
- 数据较小时(不超百万)用最小二乘法代替梯度下降可以取得不错的结果。
- 求矩阵的逆是最消耗时间的
- 用梯度下降会存在收敛问题,步长\(\alpha\) 选不好还会震荡
几何意义推导
-
假设普通二维方程,有解的情况
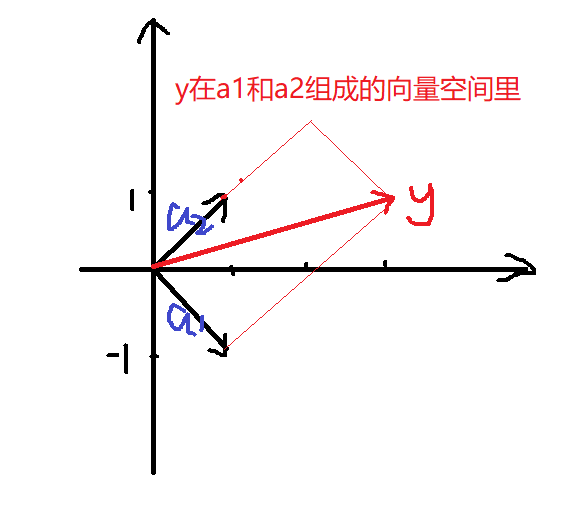
\[\begin{cases}x_1+x_2=3\\-x_1+x_2=1\end{cases} \]写成矩阵形式
\[\left[\begin{matrix}1&1\\-1&1\end{matrix}\right]\left[\begin{matrix}x_1\\x_2\end{matrix}\right]=\left[\begin{matrix}3\\1\end{matrix}\right] \]记列向量\(\left[\begin{matrix}1\\-1\end{matrix}\right]\)为\(a_1\),列向量\(\left[\begin{matrix}1\\1\end{matrix}\right]\)为\(a_2\),转化为
\[a_1x_1+a_2x_2=y \]即在向量\(a_1\)和向量\(a_2\)张成的空间里表示出向量\(y\)。
![1.png]()
-
推广至方程无解的情况
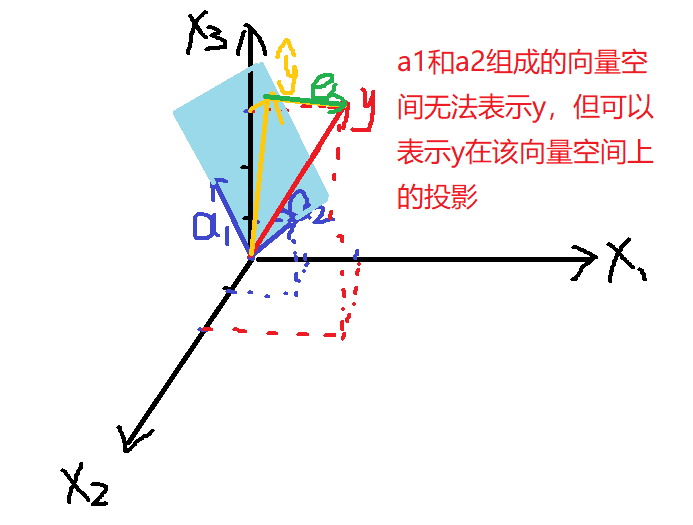
假设有三个点(0,2)(1,2)(2,3),求函数\(y=ax+b\)拟合这三个点。
写成函数形式
\[\begin{cases}a\cdot0+b=2\\a\cdot1+b=2\\a\cdot2+b=3\end{cases} \]写成矩阵形式
\[\left[\begin{matrix}0&1\\1&1\\2&1\end{matrix}\right]\left[\begin{matrix}x_1\\x_2\end{matrix}\right]=\left[\begin{matrix}2\\2\\3\end{matrix}\right] \]记列向量\(\left[\begin{matrix}0\\1\\2\end{matrix}\right]\)为\(a_1\),列向量\(\left[\begin{matrix}1\\1\\1\end{matrix}\right]\)为\(a_2\)
![2.png]()
在向量\(a_1\)和向量\(a_2\)张成的空间里无法表示出向量\(y\),只能表示出向量\(y\)在该平面上的投影\(\widehat{y}\),记向量\(y-\widehat{y}=e\),其中
\[\widehat{y}=A\theta \]则向量\(e\)垂直于向量\(a_1\)和向量\(a_2\)张成的空间。
\[\begin{cases}a_1\cdot e=0\\a_2\cdot e=0\end{cases} \]即 \(A^Te=0\)
代入得
\[A^T(y-A\theta)=0\\A^Ty-A^TA\theta=0\\A^Ty=A^TA\theta\\\theta=(A^TA)^{-1}A^Ty \]
极大似然 ( MLE )
极大似然:“最像”、“最大似然”
利用已知观察数据反推模型参数值,调整\(\theta\) 使得样本出现概率最大。
求最大似然函数估计值的一般步骤:
(1)写出似然函数;
(2)对似然函数取对数,并整理;
(3)求导数,令导数为0,得到似然方程;
(4)解似然方程,得到的参数即为所求;
Logistic回归(LR,逻辑回归模型,对数几率回归,二分类)
-
(0,1) 的连续函数
-
构造这样的连续函数,使得函数对于输出大于 0.5 时判为一类,小于 0.5时判为另一类。
- Sigmoid Function:\(\phi(z)=\frac{1}{1+e^{-z}}\)
- 把 Sigmoid Function 里的变量 z,构造成线性组合
-
Equations:\(P(y=1|x)=\frac{1}{1+exp( - \theta^Tx)}\)
- 把线性关系通过 Sigmoid 函数映射到 (0,1)
- 线性关系映射为非线性的,还是拟合函数点,但最终结果是做分类
-
定义几率 odds
统计和概率论中,定义一个事件的发生比 (Odds) 是该事件发生和不发生的比率。
\[odds(p)=\frac{p}{1-p} \]对 \(odds\) 取对数,也就是 \(log\frac{p}{1-p}=logp-log(1-p)\)
\(log\frac{P(y=1|x)}{P(y=0|x)}=log\frac{1}{1+exp(-\theta^Tx)}-log(1-\frac{1}{1+exp(-\theta^Tx)})=-\theta^Tx\)
- 几率 odds 还是线性的
-
定义损失函数
\[J(\theta)=-\frac{1}{N}[\sum_{i=1}^N\sum_{j=0}^1 I(y^{(i)}=j)logP(y^{(i)}=j|x^{(i)},\theta)]\\=-\frac{1}{N}[\sum_{i=1}^N y^{(i)}logh_{\theta}(x^{(i)})+(1-y^{(i)})log(1-h_{\theta}(x^{(i)}))] \]- 累加分对了的部分,加了负号,分得越对函数值越小
- 使用 log,由乘积形式转为加和形式
-
梯度下降求最优值
\[\theta \leftarrow \theta - \alpha \frac{\partial J(\theta)}{\partial \theta} \]
Softmax Regression ( Logistic 多分类引申 )
引申为多分类情况
岭回归 (Ridge Regression)
前言:回归分析中常用最小二乘法,由 \(A\theta=y\) 采用最小二乘法,定义损失函数为残差的平方,最小化损失函数 \(||A\theta-y||^2\) ,采用梯度下降法求解,也可直接用公式 \(\theta=(A^TA)^{-1}A^Ty\) 求解,若矩阵 \(A\) 不能求逆该如何解决问题。
岭回归
对损失函数加一些正则项 ( regularization ),对系数加一些条件
-
下角标 2 表示 L-2 norm:\(||\theta||_2=\sqrt{\theta_1^2+\theta_2^2+...+\theta_n^2}\)
-
加入正则项 \(\frac{1}{2}\alpha ||\theta||_2^2\) ,新的损失函数 \(J(\theta)\) 既满足 \(x\theta\) 与 \(y\) 尽可能逼近,又限制 \(\theta\) 取得过大的值。
-
\(\alpha\) 值像是一个权重,调整逼近程度与 \(\theta\) 值之间的关系
梯度下降
循环求解 ( Iterative Learning ) ,寻找使得 \(J(\theta)\) 最小的 \(\theta\)
- \(\alpha\) 是求解的步长
- \(GD\) 就是一个求解的方向
-
二维线性拟合
\[h(\theta) =\theta_1x+\theta_0 \]\[\begin{cases}\theta_0 \leftarrow \theta_0-\alpha \frac{\partial J}{\partial \theta_0}\\\theta_1 \leftarrow \theta_1-\alpha \frac{\partial J}{\partial \theta_1}\end{cases} \]- 迭代一定是同时更新 \(\theta_0、\theta_1\),\(\alpha\) 有自动修正性能,只要不是太大且沿着正确方向迭代,一定能找到最小值。
\[\frac{J}{\partial \theta_0}=\frac{\partial}{\partial \theta_0}(\frac{1}{2N}\sum_{i=0}^N (h_{\theta}(x^{(i)})-y^{(i)})^2)=\frac{1}{N}\sum_{i=0}^N(h_{\theta}(x^{(i)})-y^{(i)}) \]\[\frac{J}{\partial \theta_1}=\frac{\partial}{\partial \theta_1}(\frac{1}{2N}\sum_{i=0}^N (h_{\theta}(x^{(i)})-y^{(i)})^2)=\frac{1}{N}\sum_{i=0}^N(h_{\theta}(x^{(i)})-y^{(i)})x^{(i)} \]- \(h(\theta) =\theta_1x+\theta_0\) 写成 \(h(\theta) =\theta_1x_1+\theta_0x_0(x_0=1)\),\(\frac{1}{N}\sum_{i=0}^N(h_{\theta}(x^{(i)})-y^{(i)})\) 相当于 \(\frac{1}{N}\sum_{i=0}^N(h_{\theta}(x^{(i)})-y^{(i)})x_0\)
- \(\frac{1}{N}\sum_{i=0}^N(h_{\theta}(x^{(i)})-y^{(i)})x^{(i)}\)相当于\(\frac{1}{N}\sum_{i=0}^N(h_{\theta}(x^{(i)})-y^{(i)})x_1^{(i)}\)
-
高维线性拟合
\[h(\theta) =\theta^Tx=\sum_{i=1}^n \theta_j x_j =\theta_1x_1+\theta_2x_2+...+\theta_nx_n+\theta_0 \]- \(\theta\) 更像每个特征的权重
\[\theta_j \leftarrow \theta_j-\alpha \frac{\partial J(\theta)}{\partial \theta_j}=\theta_j-\alpha(\frac{1}{N}\sum_{i=0}^N(h_{\theta}(x^{(i)})-y^{(i)})x_j^{(i)}) \]
求解岭回归的损失函数
梯度下降法
因为加了惩罚项,所以梯度下降迭代公式为
- 梯度下降中用 \(\alpha\) 表示步长,为了区分使用 \(\lambda\) 表示正则项的系数
- 正则项 \(\frac{1}{2}\lambda ||\theta||_2^2\) 对 \(\theta\) 求导正好等于 \(\lambda \theta\)
- \(\alpha(\frac{1}{N}\sum_{i=1}^N(h_{\theta}(x^{(i)})-y^{(i)})x_j^{(i)}\) 部分每次更新是不变的
- \((1-\frac{\alpha \lambda}{N})\) 中,$ \alpha $ 学习速率一般 0.1~0.5,$ \lambda$ 相对权重一般也比较小,但 \(N\) 一般特别大,所以 \(\frac{\alpha \lambda}{N}\) 是一个很小的小数。每次迭代使得 \(\theta_j\) 缩小。
最小二乘法
最小二乘原始写法:$$\theta=(ATA)A^TY$$
加上岭回归:$$\widehat{\theta}=(A^TA+\lambda I){-1}ATY $$
- \(A^TA\) 是(n+1)*(n+1)的
- \(I\) 也必须是 (n+1)*(n+1),但对角线并不全是1,而是 \(diag(0,1,1...)\),不算是标准的单位矩阵。因为 \(\theta_0\) 不需要加惩罚项部分。
- 对于非满秩矩阵加上惩罚项就可以求逆了
- 一般应用最小二乘都是加上岭回归的最小二乘
LASSO回归 ( Least Absolute Shrinkage and Selection Operator)
正则项加的是\(L-1norm\)
- 对特征 \(\theta_j\) 有选择功能,相当于选择出非 0 的特征
- 希望 \(h_{\theta}(x)=\theta_0+\theta_1x_1+\theta_2x_2+...+\theta_nx_n\) 中特征向量\(\theta^T\)中有尽可能多的 0,即 \(L-0 norm\) 尽可能小
- 但是\(L-0norm\)不是一个凸函数甚至不是一个连续函数,很难优化
- 使用 \(L-1norm\) 逼近 \(L-0norm\)
- \(L-1norm\) 可减少复杂度
- 1范数连续且是凸函数,但在一些点不可导,所以不可用梯度下降优化
LASSO优化
参考:[Lasso回归算法: 坐标轴下降法与最小角回归法小结]
一. Coordinate Descent ( 坐标轴梯度下降 )
先求任何给定 $\theta_j $,在该维度找到最小值,在 \(\theta_j\) 维度将最小值固定;选取另外一个维度 \(\theta_k\),从 \(\theta_j\) 维度最小值出发,寻找 $\theta_k $ 维度最小值,不断调整。
- 先求 \(\theta\) 与 \(Y\) 之间的距离,选取相似度最大的 \(\theta_i\) 作为起始维度 ( 影响有限 )
- 每个维度都要搜索
二.Forward Selection ( 前向选择 )
求 \(y\) 在特征维度组成的平面的投影 $\widehat{y} $
- 导出最小二乘法计算公式
- 在每一个维度方向求一个 $\theta_i $,使得向量加和等于 $\widehat{y} $
- 只需要执行一次操作,效率高,速度快。但当自变量不是正交的时候,由于每次都是在做投影,所有算法只能给出一个局部近似解
三.Forward Strategy ( 前向梯度 )
- 基于计算的形式,求 \(y\) 在特征维度组成的平面的投影 $\widehat{y} $。
- 在平面内沿着 cost function 减少的方向移动。
- 每一次更新同时计算 \(\varepsilon x_i\) , 计算在哪个维度损失最小,就往哪个维度走 \(\varepsilon\)。
- 当算法在 \(\varepsilon\) 很小的时候,可以很精确的给出最优解,迭代次数也大大的增加。和前向选择算法相比,前向梯度算法更加精确,但是更加复杂。
四.Least Angle Regression ( 角回归,LARS )
- 先一步找到最合适的 \(\theta_1x_1\)
- 找到 \(x_2\) 与 \(\theta_1x_1\) 的角平分线
- 在角分线上不断加 \(\varepsilon\) 使得损失函数最小
- 最小角回归法对前向梯度算法和前向选择算法做了折中,保留了前向梯度算法一定程度的精确性,同时简化了前向梯度算法一步步迭代的过程
线性模型总结
- 线性模型就是在高维空间里用线性方程拟合数据
- 维度过高时添加约束项,约束项使用 \(L-2norm\) 可直接优化,使用 \(L-1 norm\) 就需要角回归等特殊优化方法
- 对于如何选择合适系数 \(\theta^T\) 使得 \(\widehat{y}\) 更逼近期望结果,一般使用损失函数衡量。损失函数一般是 \(L-2norm\)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号