
基于图像处理和tensorflow实现GTA5的车辆自动驾驶——第八节伪AI驾驶
代码已放到码云
综述
- 上节实现了在理想环境下给道路画线的功能
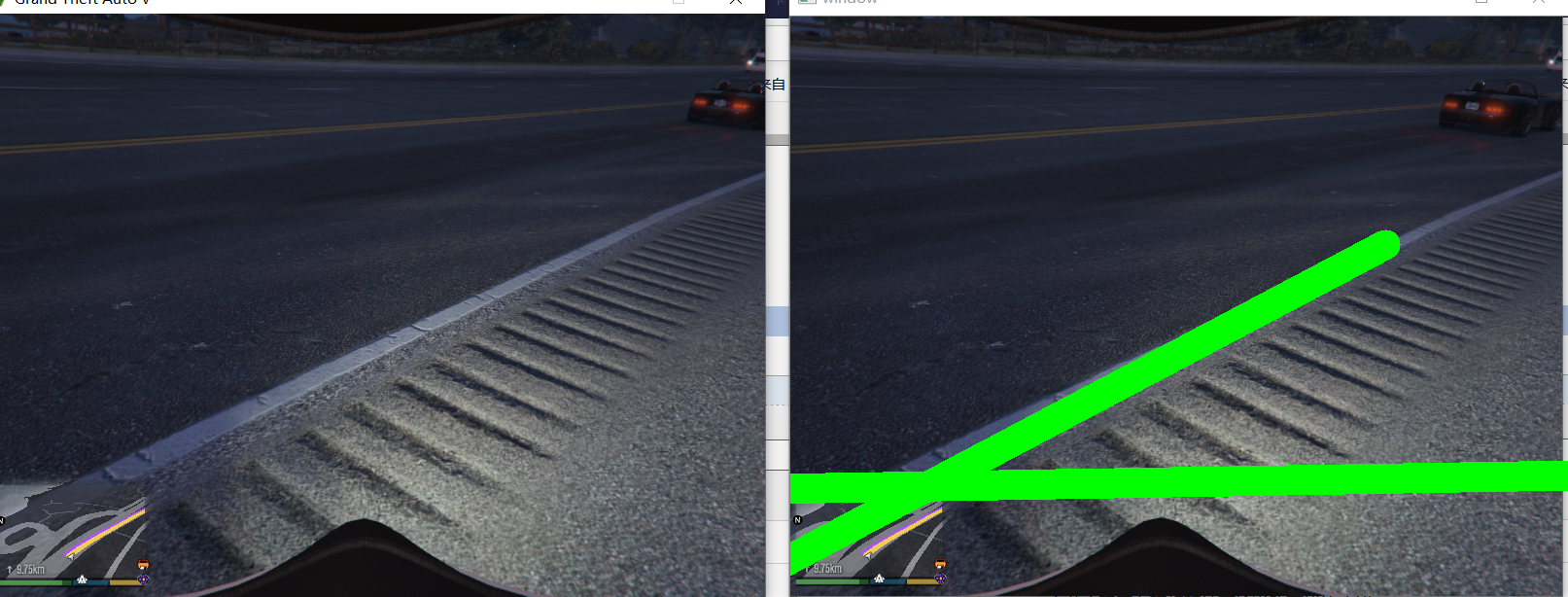
- 不理想的环境1:如果不在道路中间,而靠近道路右边,会出现下面的情况(直线的斜率同号,且直线的斜率为负)
![]()
- 不理想的环境2:如果不在道路中间,而靠近道路左边,会出现下面的情况(直线的斜率同号,且直线的斜率为正)
![]()

方法
正确行驶

- 即保持在两条直线的中间
- 如果太偏左(两条直线的斜率都为正),那么让人物向右开
- 如果太偏右(两条直线的斜率都为负),那么让人物向左开
获取斜率
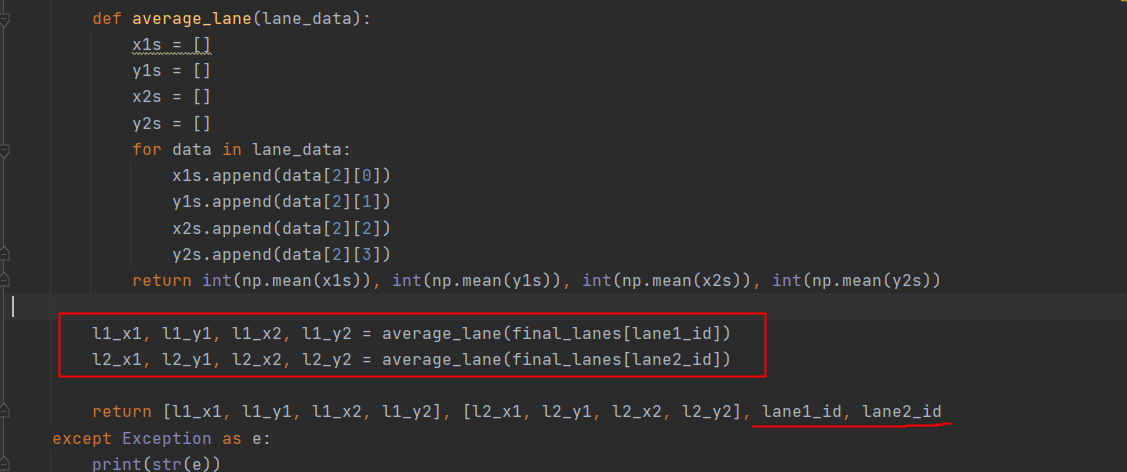
在函数compare_lines()里,只是没有返回,找到斜率(我红色框框起来的地方)让其返回即可
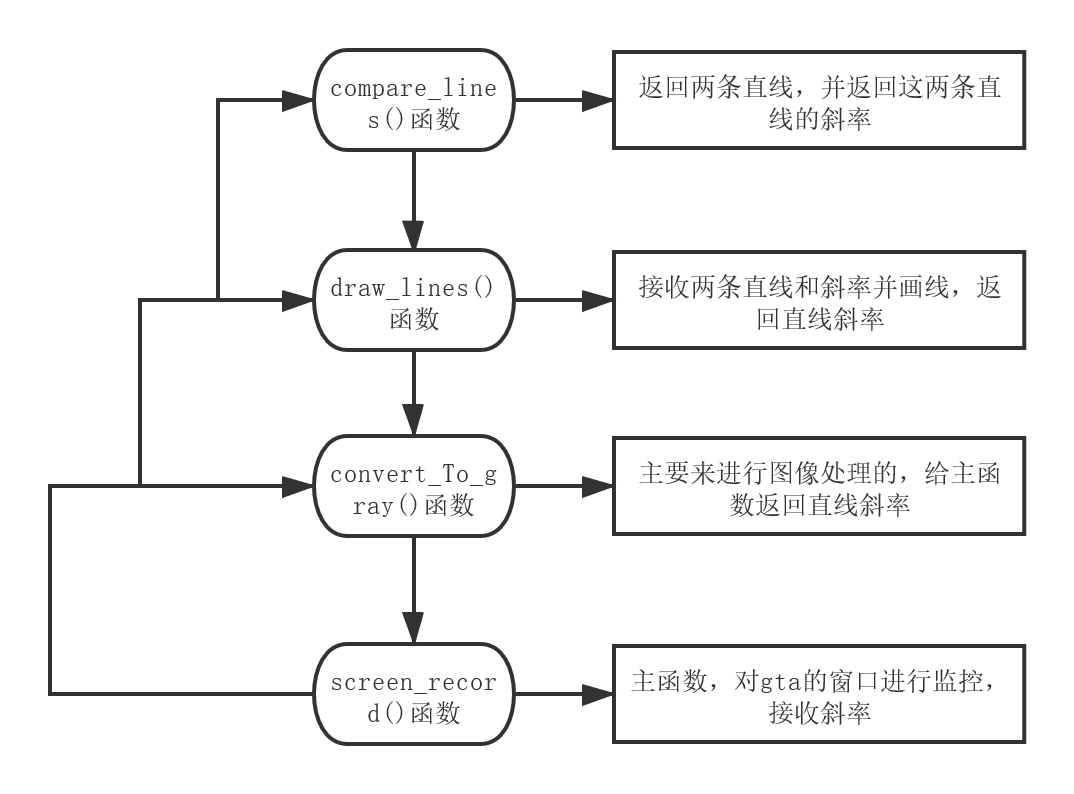
接收斜率
在函数draw_lines()里,调用了compare_lines(),增加变量接收数据即可

在函数convert_To_gray()里,调用了draw_lines()
- 先让draw_lines()返回斜率
- convert_To_gray()接收斜率
- convert_To_gray()返回斜率给主函数
听起来比较麻烦, 我画图解释一下把
![]()
主文件
import numpy as np
from PIL import ImageGrab
import cv2
import time
def compare_lines(lines, color=[0, 255, 255], thickness=3):
'''
try:
for line in lines:
coords = line[0]
cv2.line(img=img, pt1=(coords[0], coords[1]),
pt2=(coords[2], coords[3]), color=[255, 255, 255], thickness=3
)
except:
pass
'''
lane1_id = 0
lane2_id = 0
# if this fails, go with some default line
try:
# finds the maximum y value for a lane marker
# (since we cannot assume the horizon will always be at the same point.)
ys = []
for i in lines:
for ii in i:
ys += [ii[1], ii[3]]
min_y = min(ys)
max_y = 600
new_lines = []
line_dict = {}
for idx, i in enumerate(lines):
for xyxy in i:
# These four lines:
# modified from http://stackoverflow.com/questions/21565994/method-to-return-the-equation-of-a-straight-line-given-two-points
# Used to calculate the definition of a line, given two sets of coords.
x_coords = (xyxy[0], xyxy[2])
y_coords = (xyxy[1], xyxy[3])
A = np.vstack([x_coords, np.ones(len(x_coords))]).T
m, b = np.linalg.lstsq(A, y_coords)[0]
# Calculating our new, and improved, xs
x1 = (min_y - b) / (m)
x2 = (max_y - b) / m
line_dict[idx] = [m, b, [int(x1), min_y, int(x2), max_y]]
new_lines.append([int(x1), min_y, int(x2), max_y])
final_lanes = {}
for idx in line_dict:
final_lanes_copy = final_lanes.copy()
m = line_dict[idx][0]
b = line_dict[idx][1]
line = line_dict[idx][2]
if len(final_lanes) == 0:
final_lanes[m] = [[m, b, line]]
else:
found_copy = False
for other_ms in final_lanes_copy:
if not found_copy:
if abs(other_ms * 1.2) > abs(m) > abs(other_ms * 0.8):
if abs(final_lanes_copy[other_ms][0][1] * 1.2) > abs(b) > abs(
final_lanes_copy[other_ms][0][1] * 0.8):
final_lanes[other_ms].append([m, b, line])
found_copy = True
break
else:
final_lanes[m] = [[m, b, line]]
line_counter = {}
for lanes in final_lanes:
line_counter[lanes] = len(final_lanes[lanes])
top_lanes = sorted(line_counter.items(), key=lambda item: item[1])[::-1][:2]
lane1_id = top_lanes[0][0]
lane2_id = top_lanes[1][0]
def average_lane(lane_data):
x1s = []
y1s = []
x2s = []
y2s = []
for data in lane_data:
x1s.append(data[2][0])
y1s.append(data[2][1])
x2s.append(data[2][2])
y2s.append(data[2][3])
return int(np.mean(x1s)), int(np.mean(y1s)), int(np.mean(x2s)), int(np.mean(y2s))
l1_x1, l1_y1, l1_x2, l1_y2 = average_lane(final_lanes[lane1_id])
l2_x1, l2_y1, l2_x2, l2_y2 = average_lane(final_lanes[lane2_id])
return [l1_x1, l1_y1, l1_x2, l1_y2], [l2_x1, l2_y1, l2_x2, l2_y2], lane1_id, lane2_id
except Exception as e:
print(str(e))
def draw_lines(image, gray_img, lines):
slope1 = 0
slope2 = 0
try:
l1, l2, slope1, slope2 = compare_lines(lines)
cv2.line(image, (l1[0], l1[1]), (l1[2], l1[3]), [0, 255, 0], 30)
cv2.line(image, (l2[0], l2[1]), (l2[2], l2[3]), [0, 255, 0], 30)
return slope1, slope2
except Exception as e:
print(str(e))
pass
try:
for coords in lines:
coords = coords[0]
try:
cv2.line(gray_img, (coords[0], coords[1]), (coords[2], coords[3]), [255, 0, 0], 3)
except Exception as e:
print(str(e))
except Exception as e:
pass
def roi(img, vertices):
mask = np.zeros_like(img)
cv2.fillPoly(mask, vertices, 255)
masked = cv2.bitwise_and(img, mask)
return masked
def convert_To_gray(image):
# to gray
gray_img = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# canny
gray_img = cv2.Canny(gray_img, threshold1=100, threshold2=200)
# 高斯模糊
gray_img = cv2.GaussianBlur(gray_img, ksize=(5, 5), sigmaX=0)
# mask img 只取红色区域的数据
vertices = np.array([[10, 500], [10, 300], [300, 200], [500, 200], [800, 300], [800, 500],
], np.int32)
gray_img = roi(gray_img, [vertices])
# 划线
slope1 = 0
slope2 = 0
lines = cv2.HoughLinesP(gray_img, rho=1, theta=np.pi / 180, threshold=180, lines=np.array([]), minLineLength=150,
maxLineGap=5)
try:
slope1, slope2 = draw_lines(image=image, gray_img=gray_img, lines=lines)
except:
pass
return slope1, slope2
from Keys import PressKey, ReleaseKey, Key_Mapping
def go_forward():
# 按w键 把其他键松开
PressKey(Key_Mapping.w)
def go_left():
# 按a键 把其他键松开
PressKey(Key_Mapping.a)
ReleaseKey(Key_Mapping.w)
ReleaseKey(Key_Mapping.a)
def go_right():
# 按d键 把其他键松开
PressKey(Key_Mapping.d)
ReleaseKey(Key_Mapping.w)
ReleaseKey(Key_Mapping.d)
def depressAll():
# 按w键 把其他键松开
ReleaseKey(Key_Mapping.w)
ReleaseKey(Key_Mapping.a)
ReleaseKey(Key_Mapping.s)
ReleaseKey(Key_Mapping.d)
def screen_record():
i = 3
while i != 0:
print("time:", i)
time.sleep(0.5)
i -= 1
last_time = time.time()
while True:
# 800x600 windowed mode for GTA 5, at the top left position of your main screen.
# 40 px accounts for title bar.
printscreen = np.array(ImageGrab.grab(bbox=(0, 40, 800, 640)))
print('loop took {} seconds'.format(time.time() - last_time))
last_time = time.time()
slope1, slope2 = convert_To_gray(printscreen)
# 判断靠左还是靠右
if slope1<0 and slope2<0:
go_right()
print("right"*10)
elif slope1>0 and slope2>0:
go_left()
print("left"*10)
else:
go_forward()
print('go'*10)
# cv2.imshow('window', gray_img)
cv2.imshow('window', cv2.cvtColor(printscreen, cv2.COLOR_BGR2RGB))
if cv2.waitKey(25) & 0xFF == ord('q'):
cv2.destroyAllWindows()
break
screen_record()
按键映射文件 Keys.py (不要改名)
import ctypes
import time
SendInput = ctypes.windll.user32.SendInput
# C struct redefinitions
PUL = ctypes.POINTER(ctypes.c_ulong)
class KeyBdInput(ctypes.Structure):
_fields_ = [("wVk", ctypes.c_ushort),
("wScan", ctypes.c_ushort),
("dwFlags", ctypes.c_ulong),
("time", ctypes.c_ulong),
("dwExtraInfo", PUL)]
class HardwareInput(ctypes.Structure):
_fields_ = [("uMsg", ctypes.c_ulong),
("wParamL", ctypes.c_short),
("wParamH", ctypes.c_ushort)]
class MouseInput(ctypes.Structure):
_fields_ = [("dx", ctypes.c_long),
("dy", ctypes.c_long),
("mouseData", ctypes.c_ulong),
("dwFlags", ctypes.c_ulong),
("time", ctypes.c_ulong),
("dwExtraInfo", PUL)]
class Input_I(ctypes.Union):
_fields_ = [("ki", KeyBdInput),
("mi", MouseInput),
("hi", HardwareInput)]
class Input(ctypes.Structure):
_fields_ = [("type", ctypes.c_ulong),
("ii", Input_I)]
# Actuals Functions
def PressKey(hexKeyCode):
extra = ctypes.c_ulong(0)
ii_ = Input_I()
ii_.ki = KeyBdInput(0, hexKeyCode, 0x0008, 0, ctypes.pointer(extra))
x = Input(ctypes.c_ulong(1), ii_)
ctypes.windll.user32.SendInput(1, ctypes.pointer(x), ctypes.sizeof(x))
def ReleaseKey(hexKeyCode):
extra = ctypes.c_ulong(0)
ii_ = Input_I()
ii_.ki = KeyBdInput(0, hexKeyCode, 0x0008 | 0x0002, 0, ctypes.pointer(extra))
x = Input(ctypes.c_ulong(1), ii_)
ctypes.windll.user32.SendInput(1, ctypes.pointer(x), ctypes.sizeof(x))
class Key_Mapping:
num1 = 0x02
num2 = 0x03
num3 = 0x04
num4 = 0x05
num5 = 0x06
num6 = 0x07
num7 = 0x08
num8 = 0x09
num9 = 0x0a
num0 = 0x0b
escape = 0x01
equal = 0x0d
backspace = 0x0e
tab = 0x0f
q = 0x10
w = 0x11
e = 0x12
r = 0x13
t = 0x14
y = 0x15
u = 0x16
i = 0x17
o = 0x18
p = 0x19
enter = 0x1c
lcontrol = 0x1d
a = 0x1e
s = 0x1f
d = 0x20
f = 0x21
g = 0x22
h = 0x23
j = 0x24
k = 0x25
l = 0x26
z = 0x2c
x = 0x2d
c = 0x2e
v = 0x2f
b = 0x30
n = 0x31
m = 0x32
shift = 0x36
multiply = 0x37
space = 0x39
capital = 0x3a
f1 = 0x3b
f2 = 0x3c
f3 = 0x3d
f4 = 0x3e
f5 = 0x3f
f6 = 0x40
f7 = 0x41
f8 = 0x42
f9 = 0x43
f10 = 0x44
numlock = 0x45
f11 = 0x57
f12 = 0x58
divide = 0xb5
home = 0xc7
up = 0xc8
prior = 0xc9
left = 0xcb
right = 0xcd
end = 0xcf
down = 0xd0
next = 0xd1
insert = 0xd2
delete = 0xd3
divide = 0xb5
home = 0xc7
up = 0xc8
prior = 0xc9
left = 0xcb
right = 0xcd
end = 0xcf
down = 0xd0
next = 0xd1
insert = 0xd2
delete = 0xd3

 浙公网安备 33010602011771号
浙公网安备 33010602011771号