stm32之PWM学习
下图是一个STM32普通PWM形成的图形原理说明
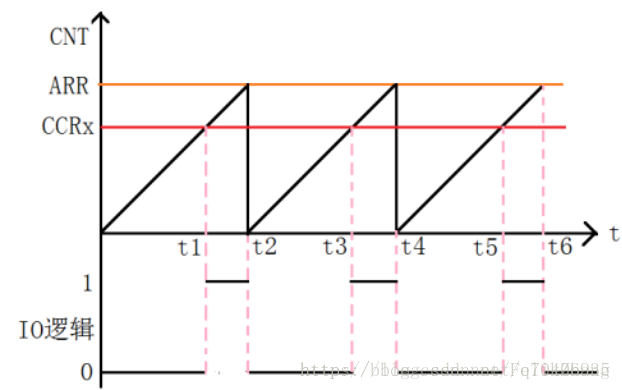
自动重装载寄存器(ARR)用于确定波形的频率(即周期)、捕获比较寄存器(CCRx)(用于确定占空比的)
PWM的工作过程如下:首先ARR寄存器里面的值确定了一个PWM周期,就是我们上面举的那两个例子中的“1秒”(注意这个周期是在PWM系统初始化的时候写入ARR寄存器的,写入以后一般就不再改动了)。然后CCR寄存器里面的值是PWM工作过程中确定的,它可以为一个定值,也可以是一个变化的值。
当它是一个定值时(就像图片里的那样),占空比就是一个定值,如果放到上面那个LED灯的例子,那么实验现象就不是灯会渐亮渐灭,而是始终维持一个比较暗的亮度,如果CCR里面的值设定得越靠近ARR寄存器里面的值(只是靠近,但不大于),那么按照图上来看,就是每个周期内高电平持续的时间越短,至于灯到底是更亮了还是更暗了就得实际情况具体分析了。
当它是一个变化的值的时候,在程序里就可以设置一个变量,让这个变量按照一定规律递增(或递减)。然后把这个值写入到CCR寄存器中,这样每个周期中PWM的占空比就是不同的。宏观上,就能看到上面的LED灯的渐亮渐灭的过程。
--------------------- 以上来自 FelikZhang 的CSDN 博客 ,全文地址请点击:https://blog.csdn.net/FelikZhang/article/details/79237573?utm_source=copy
计数器值TIMx_CNT与捕获比较寄存器值CCRx比较后,最终输出高电平还是低电平,。
如图为向上计数:
定时器重装载值为ARR,比较值CCRx
t时刻对计数器值和比较值进行比较
如果计数器值小于CCRx值,输出低电平
如果计数器值大于CCRx值,输出高电平
PWM的一个周期
定时器从0开始向上计数
当0-t1段,定时器计数器TIMx_CNT值小于CCRx值,输出低电平
t1-t2段,定时器计数器TIMx_CNT值大于CCRx值,输出高电平
当TIMx_CNT值达到ARR时,定时器溢出,重新向上计数...循环此过程
至此一个PWM周期完成
影响因素
ARR : 决定PWM周期(在时钟频率一定的情况下,当前为默认内部时钟CK_INT)
CCRx : 决定PWM占空比(高低电平所占整个周期比例)下图是一个spwm的图形

一. STM32F103通用定时器简介:
- 通用定时器是一个可编程预分频器驱动的16位自动装载计数器
- 适用于: 测量输入信号的脉冲长度(输入捕获)、产生输出波形(输出比较和PWM)。
- 每个定时器都是完全独立的,都可以同步操作。
-----------------------------------------------------以下为复制粘贴---------------------------------------------------------
STM32 的通用 TIMx (TIM2、TIM3、TIM4 和 TIM5)定时器功能特点包括:
①位于低速的APB1总线上(APB1)
②16 位向上、向下、向上/向下(中心对齐)计数模式,自动装载计数器(TIMx_CNT)。
③16 位可编程(可以实时修改)预分频器(TIMx_PSC),计数器时钟频率的分频系数 为 1~65535 之间的任意数值。
④4 个独立通道(TIMx_CH1~4),这些通道可以用来作为:
输入捕获
输出比较
PWM 生成(边缘或中间对齐模式)
单脉冲模式输出
⑤可使用外部信号(TIMx_ETR)控制定时器和定时器互连(可以用 1 个定时器控制另外一个定时器)的同步电路。
如下事件发生时产生中断/DMA(6个独立的IRQ/DMA请求生成器):
①更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
②触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
③输入捕获
④输出比较
⑤支持针对定位的增量(正交)编码器和霍尔传感器电路
⑥触发输入作为外部时钟或者按周期的电流管理
STM32 的通用定时器可以被用于测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和 PWM)等。
使用定时器预分频器和 RCC 时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。STM32 的每个通用定时器都是完全独立的,没有互相共享的任何资源。
二. PWM是什么
OK,首先PWM全称为“Pulse Width Modulation”。中文翻译为:脉冲宽度调制。
脉冲宽度指的是 脉冲持续的时间,既高电平或低电平保持(持续)的时间。
而PWM通俗的说就是人为的(通过微处理器)去控制电平高低保持的时间。
好的,这里引出一个新名词,占空比:在一个脉冲的循环中,通电时间相对于总时间所占的比例。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号