激光雷达网络课程学习
第一章 绪论
激光雷达的原理
(1)脉冲测距
(2)相位测距:相位差
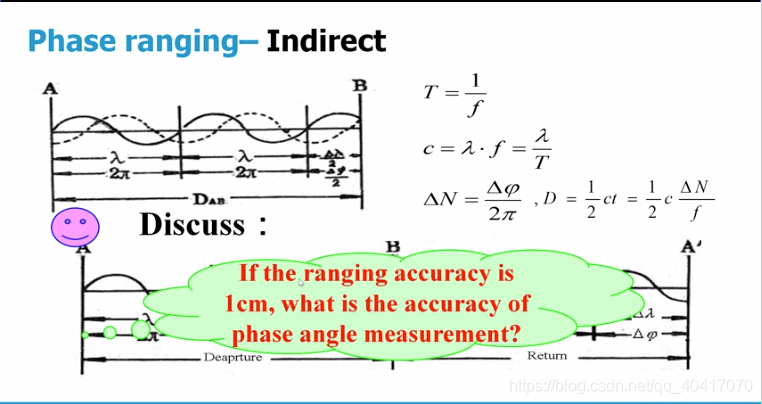
局限性:所测两点之间的距离不能大于光波的波长,
激光雷达的小结:
优点:观测的距离远
缺点:脉冲测距的精度低;相位测距的距离短
(3)基于三角测量法的测量方式
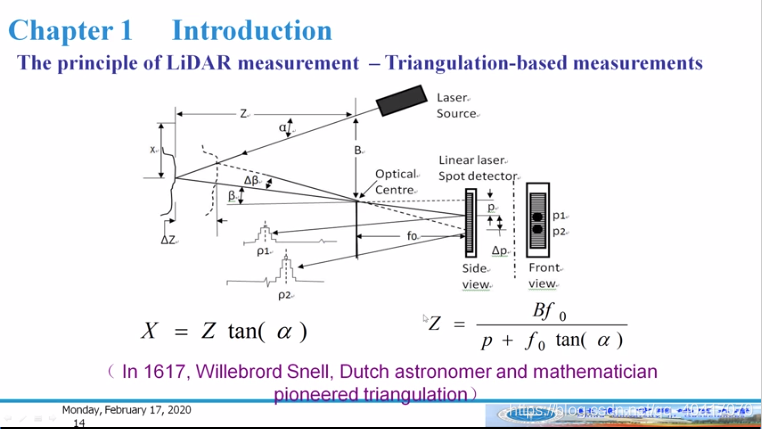
激光源 光学中心 基线
坐标的推算的过程
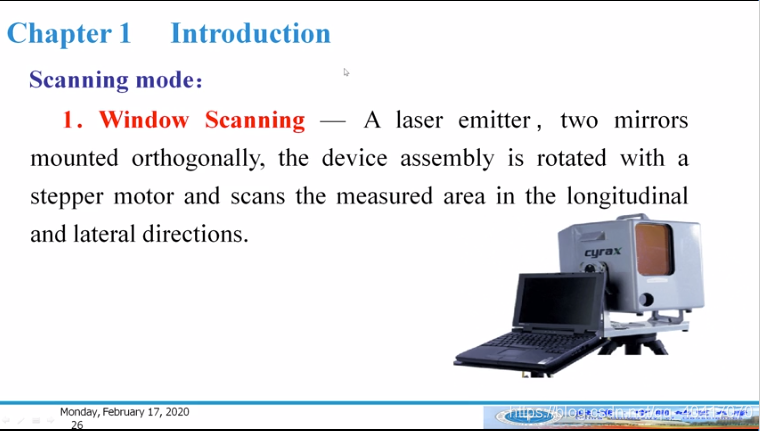
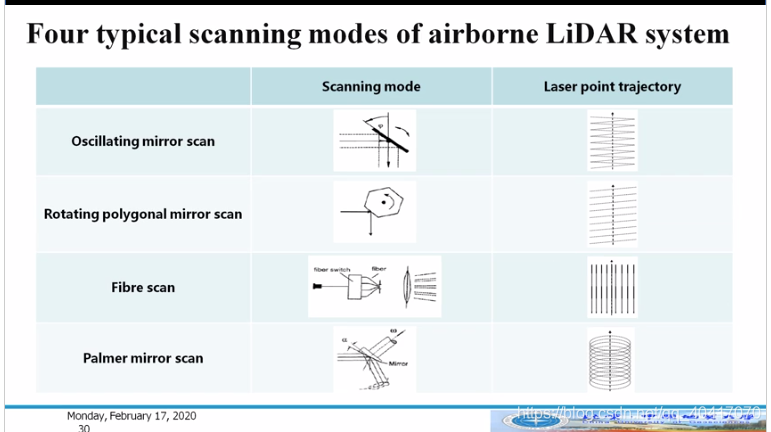
激光雷达的四种扫描方式
(1)窗口扫描
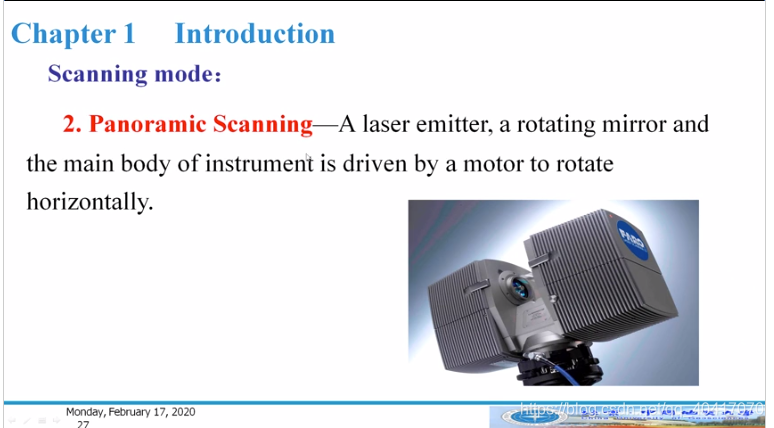
(2)全景扫描
(3)移动扫描
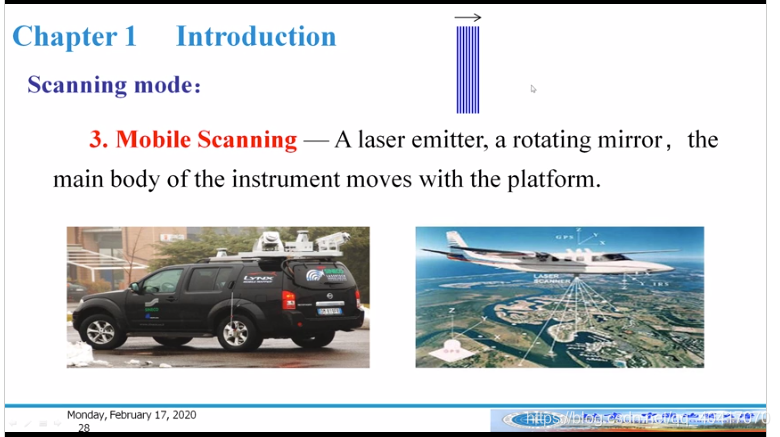
通过平台的移动可以达到面的扫描
(4)结构光扫描
第三章 Point Cloud Registration
(点云的配准)
3.1 Mathematical model
什么是点云配准?
点云配准是将两个或者多个坐标系中的大型三维空间数据点集转换为统一坐标的数学计算过程
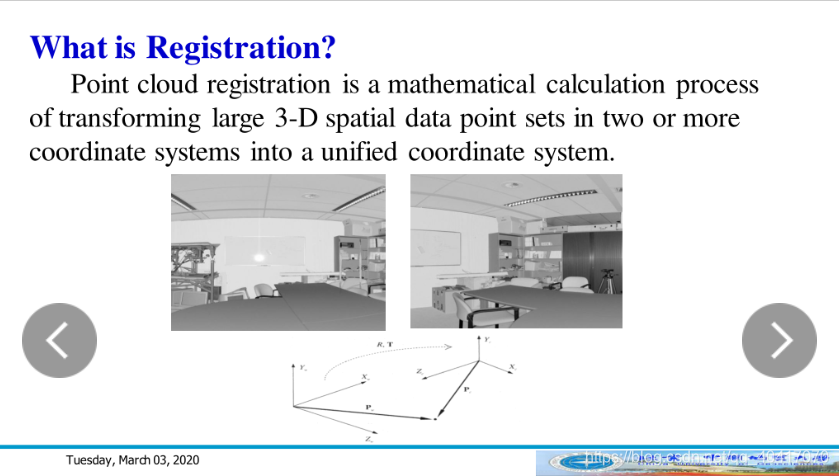
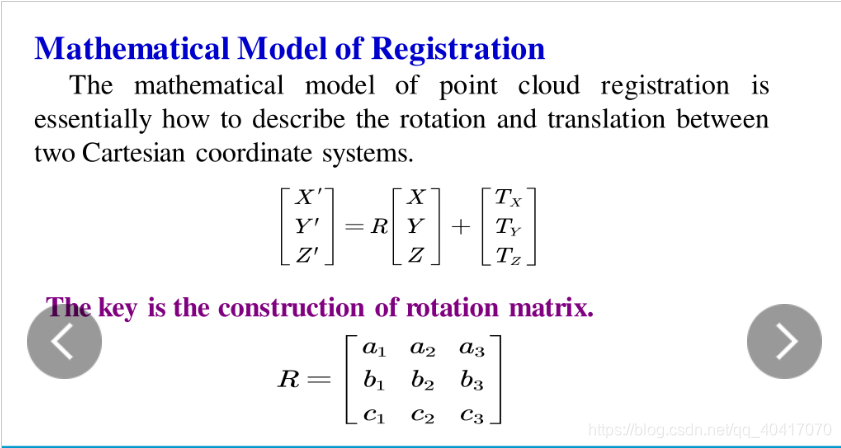
点云配准的数学模型:
点云配准的数学模型实质上是描述两个笛卡尔坐标系之间的旋转和平移;
关键是旋转矩阵的构造;
旋转加上平移的公式;
欧拉角:一次的空间旋转,分为三步进行完成;(X,Y,Z三个轴旋转)
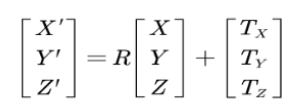
其他描述旋转矩阵的方式:
(1)角轴
任意的空间旋转可以通过确定的一个旋转轴和围绕这个旋转轴的角度来进行旋转操作,由单位向量和旋转轴所构成;
(2)单位四元素
q0是一个标量
q1,q2,q3 是一个虚数向量;

优势:常用的欧拉角在特殊的时候会出现万向节死锁(角轴和单位四元素不会出现)
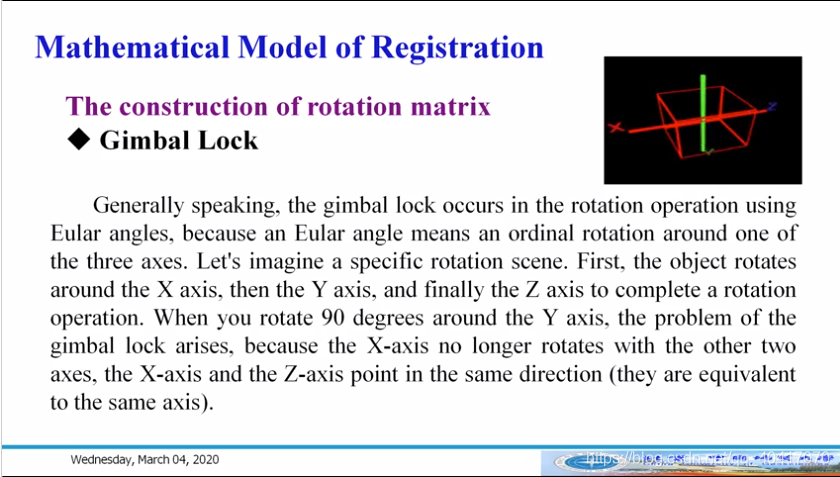
万向节死锁会使得不能绕着三个轴旋转,只能实现绕着三个轴的旋转(特殊情况特殊考虑)
小结:数学模型的构建:重要的是旋转
求解旋转平移参数(为了拼接)的时候,需要同名点来计算,找到同名点是重要的工作
(1)人工标靶(拼接时的一个特征带点)
(2)ICP精拼接方式
(3)面特征(根据面特征计算旋转平移参数)
依次介绍上面三种方法:
人工标靶:
(1)形状规则
(2)高反光材料
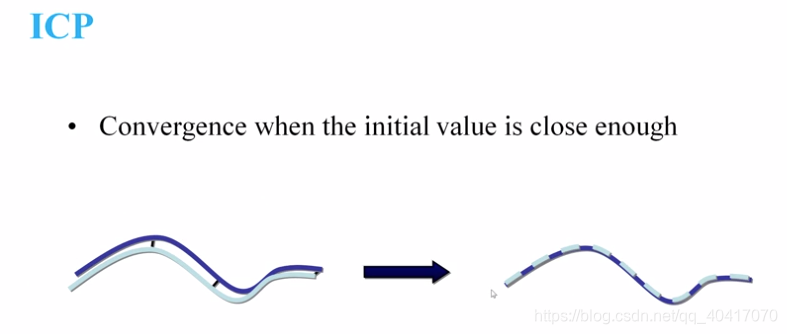
ICP
迭代最临近点方法
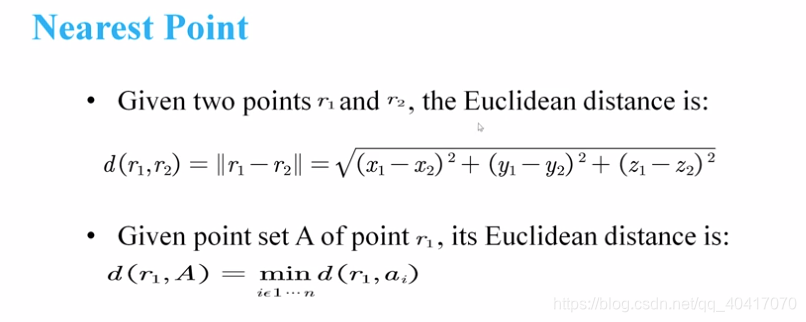
确定同名点:寻找点云2里边距离已知点(处于点云1)的距离最近的点;
迭代循环:a点到b点云的距离最近的点;根据点来计算两个点云的转换参数

ICP 对初值的要求比较高,需要两个点云的重叠度比较高;
上图的红蓝部分实际上距离很短,图上有夸张作用;
选择对应点的解决方案:假设最临近点是对应的点;通过不断的迭代选择最临近点,无限的接近,得到一个精确的结果;
欧式距离:算法找到最临近点
搜索的时间复杂度较高,需要优化算法,使用不同的数据结构
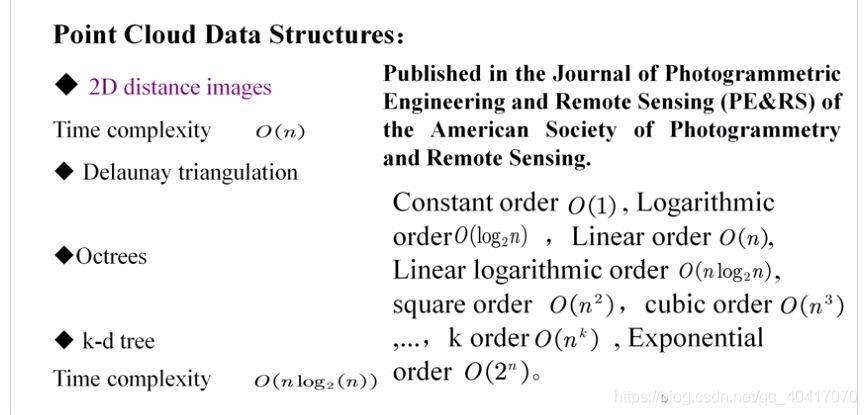
使用不同的数据结构来组织数据,拥有不同的时间复杂度;
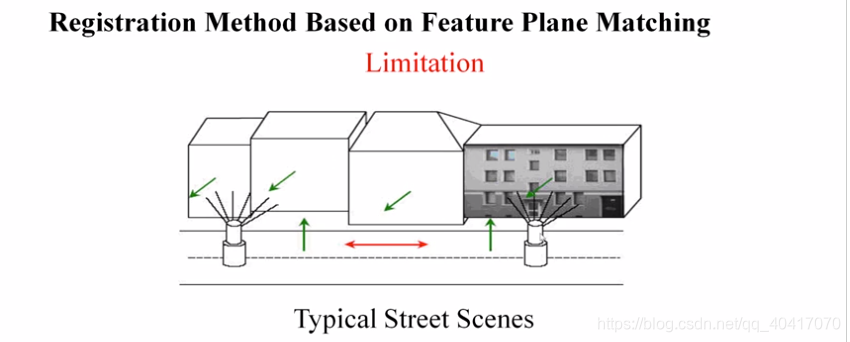
3.2 基于特征平面匹配的点云配准方法
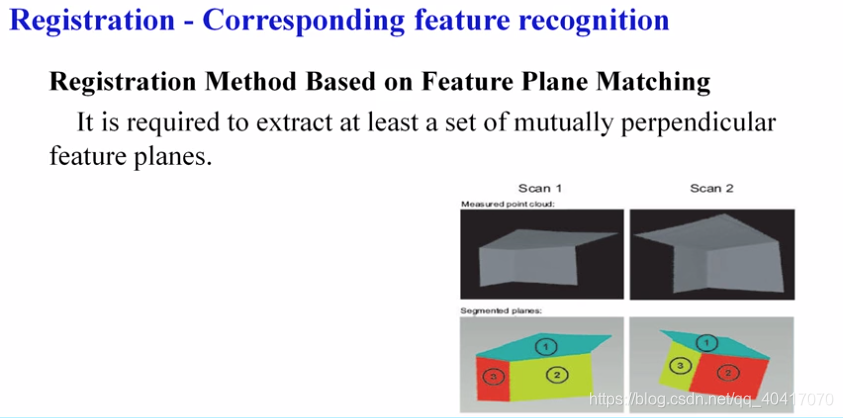
至少需要提取一组相互垂直的特征平面(来进行旋转平移参数的计算)
应该选取什么旋转矩阵?(欧拉角,角轴,单位四元素)
怎么构建方程?
纯数学的方程式与旋转平移参数的关系;
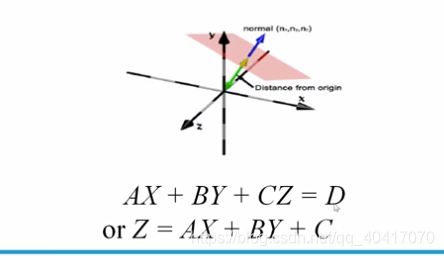
可以引用一个参数方程来描述一个平面:
引入一个平面的法向,以及坐标系的原点到平面的距离可以确定一个平面
采用角轴来使得两个点云数据达到平行;
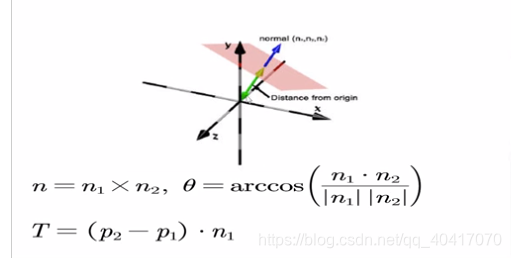
T 代表平移差值 (p2,p1代表两个点云到达坐标原点的值)
主要步骤:
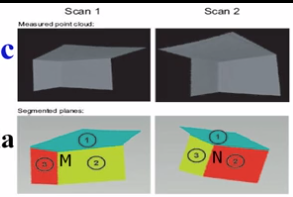
(1)对两个点云P Q 进行分类,确定平面之间的一一对应的关系,选取三对非平行平面,提取他们的法向量;
(2)求出点云 P 中三个平面的交点M,点云 Q 的三个平面的交点N,使得三个平面在原点相交
(各自的局部坐标系的原点)
(3)分别确定 PQ两个点云的同名面的法向量,然后通过法向量来计算两个法向量之间需要旋转的角度(使得重合),实现一对平面的平行,利用角轴的旋转
(4)同样的方式将三个面进行旋转,得到旋转矩阵
(5)经过了三次的旋转,三对平面已经平行,然后经过两个旋转后的交点(M,N),确定平移量
要求:必须有三个相互不平行的平面的存在,最好是三个平面相互平行
基于面特征的点云配准局限性:
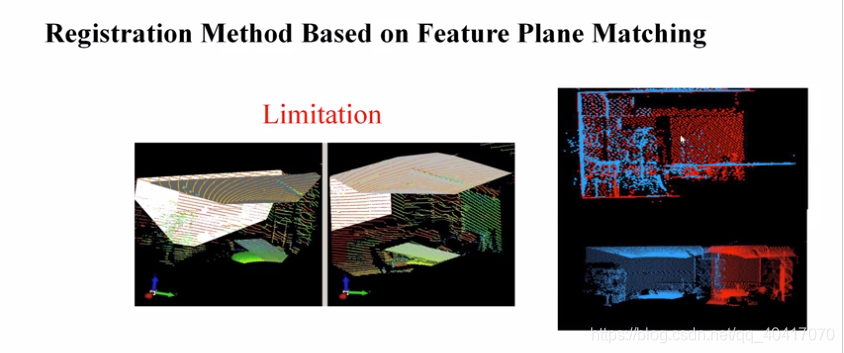
只有两个相互垂直的平面只能结算出来旋转的参数,所以需要三个不相互平行的特征面
对于街道和楼道的扫描存在问题
3.3 基于影像特征的配准方法
影像传感器与点云扫描仪的结合,可以使用成熟的图像匹配的方法可以间接获取点云之间的三维对应点,计算点云的配准参数
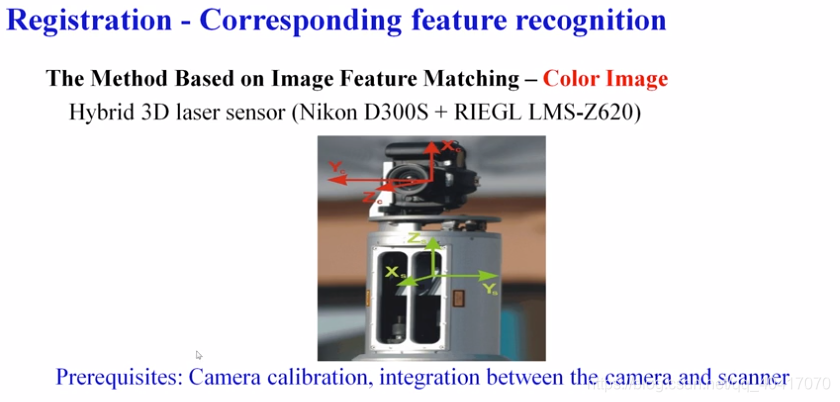
需要相机的参数(相主点坐标,主距等)
上图是相机和扫描仪的结合
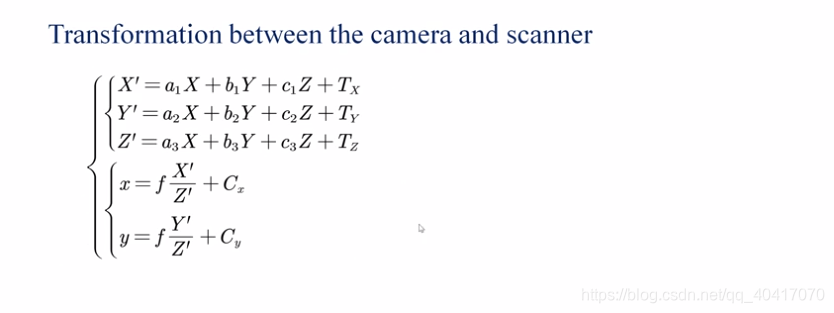
共线方程:地面点、摄影中心、像面中对应的地面点,三个点在一条直线
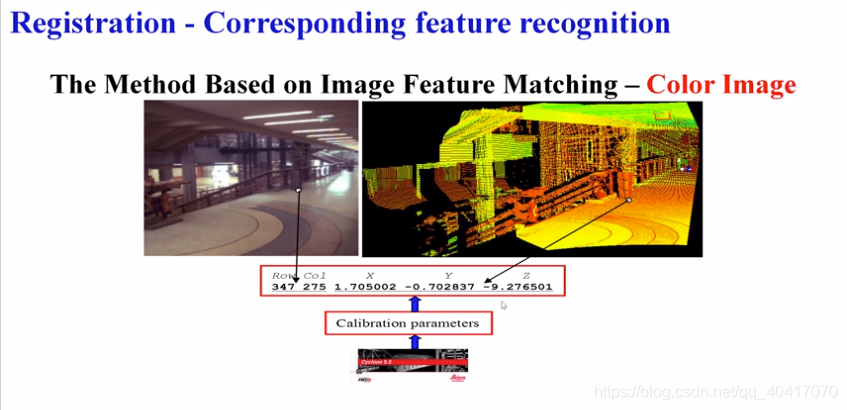
左图是相片中的坐标,右是激光扫描仪的点坐标
误差:影像到点云数据的映射关系,存在误差,需要处理
影片和点云的分辨率高低比较:
影片的分辨率较高,在有时候的对应需要线性内插,因为影片中有的点,在点云中没有对应的点。
基于图像特征匹配的全景反射图像方法
点云二维投影后得到的影像;
不存在相机检校;
固有像素点映射关系
3.3.2 其他点云匹配方法
给同名点匹配加上特定

 浙公网安备 33010602011771号
浙公网安备 33010602011771号