自动驾驶笔记之车道线检测 Ultra Fast Structure-aware Deep Lane Detection
网络结构没什么可说的,基本还是沿用特征提取+head的思路
这篇论文主要的贡献在于相比语义分割,可以人工划定对应的row 采样步长,以及每个row对应的块宽度,从而实现针对一个区块进行分类,对性能整体加速非常明显
这里主要记录一下loss的计算过程
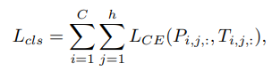
分类loss:
(1) 将特征图按照行高划分为h行
(2) 每行单独按照一定宽度切分成w块,对每块做分类,输出以行为单位的概率,与GT计算loss,其中C为第几条车道线
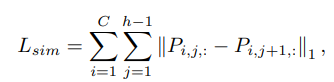
结构loss:
(1) 判断竖直方向概率连续的loss: 由于车道线竖直方向是连续的,因此行与行之间车道线预测概率最大值应该在相邻区域,所以设计一个车道线结构的loss,既竖直方向预测概率的l1距离:
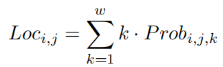
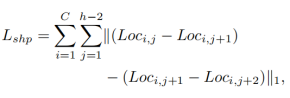
(2) 线形状约束loss:用二阶差分去约束车道线的形状的变化率
① 找到每一个row的最大概率对应的块,但是argmax不可微,所以换一种方式

② 引入对每个row对应的position做softmax,再对概率乘以Idx求和,这里会导致正确pos对应的idx与概率的积来主导

③ 在数值方向利用上式做二阶差分,差分值越小说明处于同一竖直方向

 浙公网安备 33010602011771号
浙公网安备 33010602011771号