【车联网原型系统|六】效果展示
物联网原型系统导航
【车联网原型系统|一】项目介绍+需求分析+概要设计 https://blog.csdn.net/weixin_46291251/article/details/125807297
【车联网原型系统|二】数据库+应用层协议设计 https://blog.csdn.net/weixin_46291251/article/details/125808107
【车联网原型系统|三】树莓派设计+模拟基站程序 https://blog.csdn.net/weixin_46291251/article/details/125808229
【车联网原型系统|四】adhoc组网+frp内网穿透 https://blog.csdn.net/weixin_46291251/article/details/125808621
【车联网原型系统|五】前后端分离 https://blog.csdn.net/weixin_46291251/article/details/125808674
【车联网原型系统|六】效果展示 https://blog.csdn.net/weixin_46291251/article/details/125808845
【源码下载】 https://download.csdn.net/download/weixin_46291251/86227197
【车联网原型系统|六】效果展示
小车
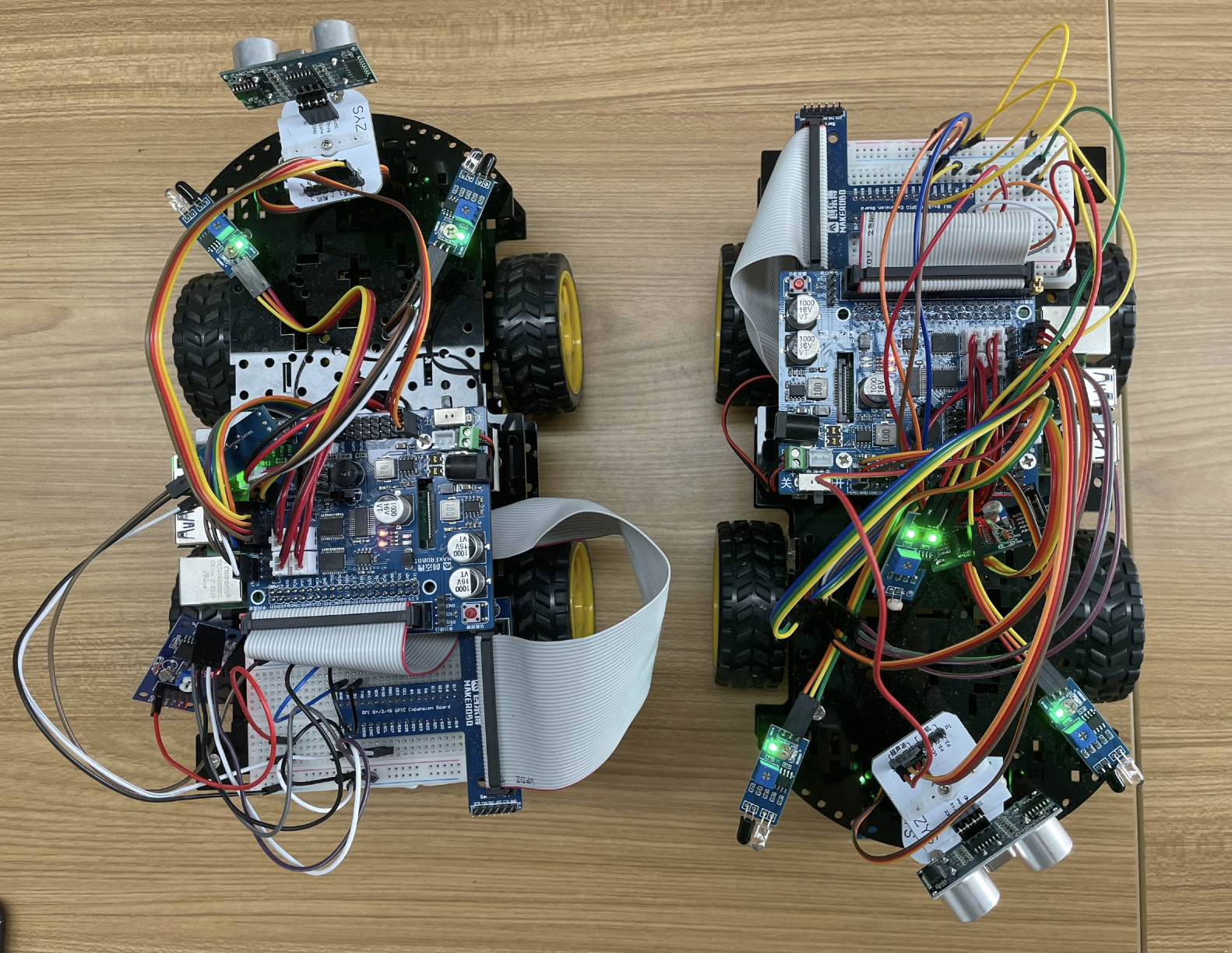
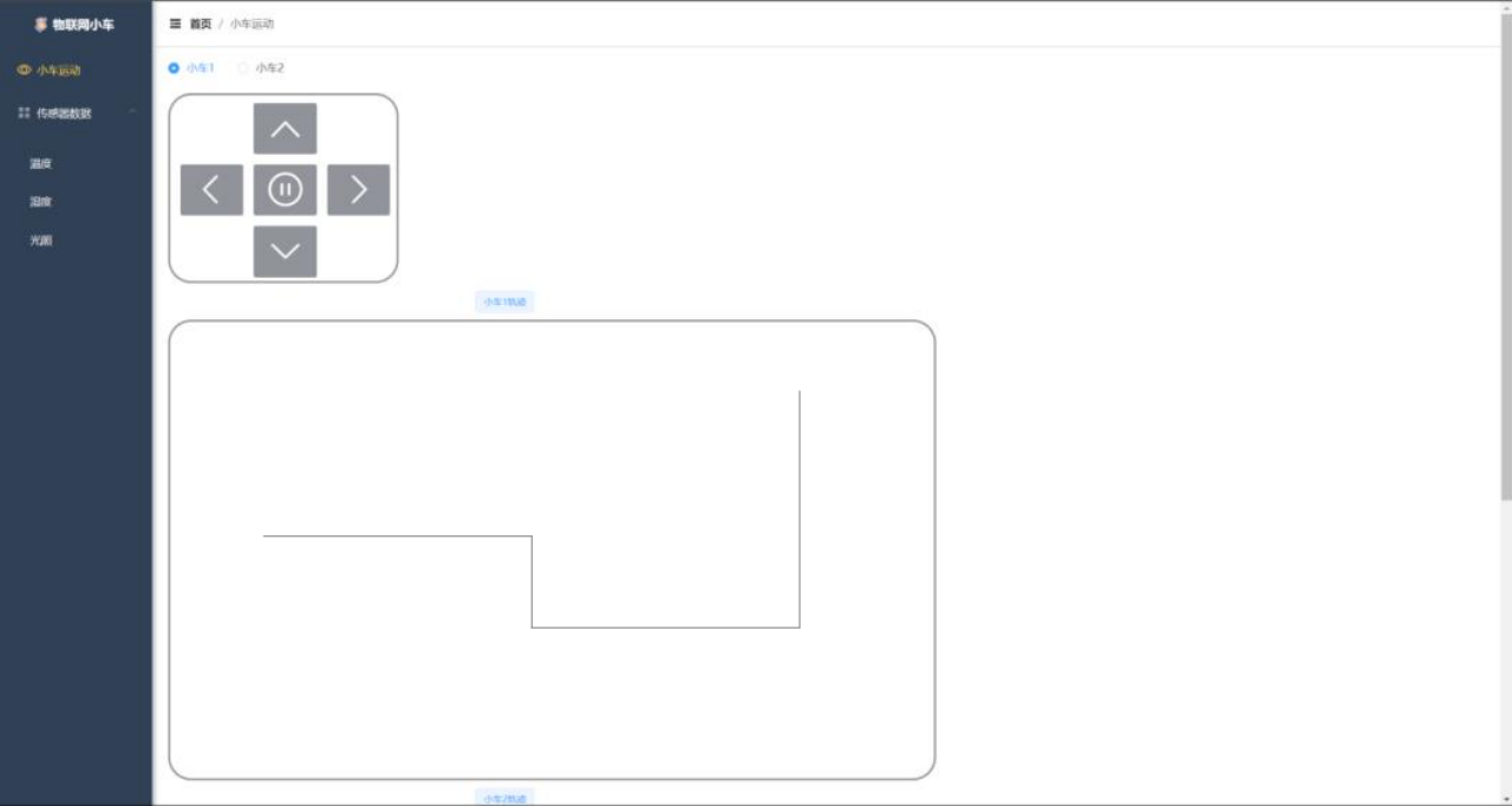
运动
前端页面可以控制小车运动,且当小车运动时,前端页面可以实时显示小车运动的轨迹。
避障
小车在遇到障碍物时,优先避障。
小车会自动选择一个安全的方向移动,然后等待下一条运动指令。

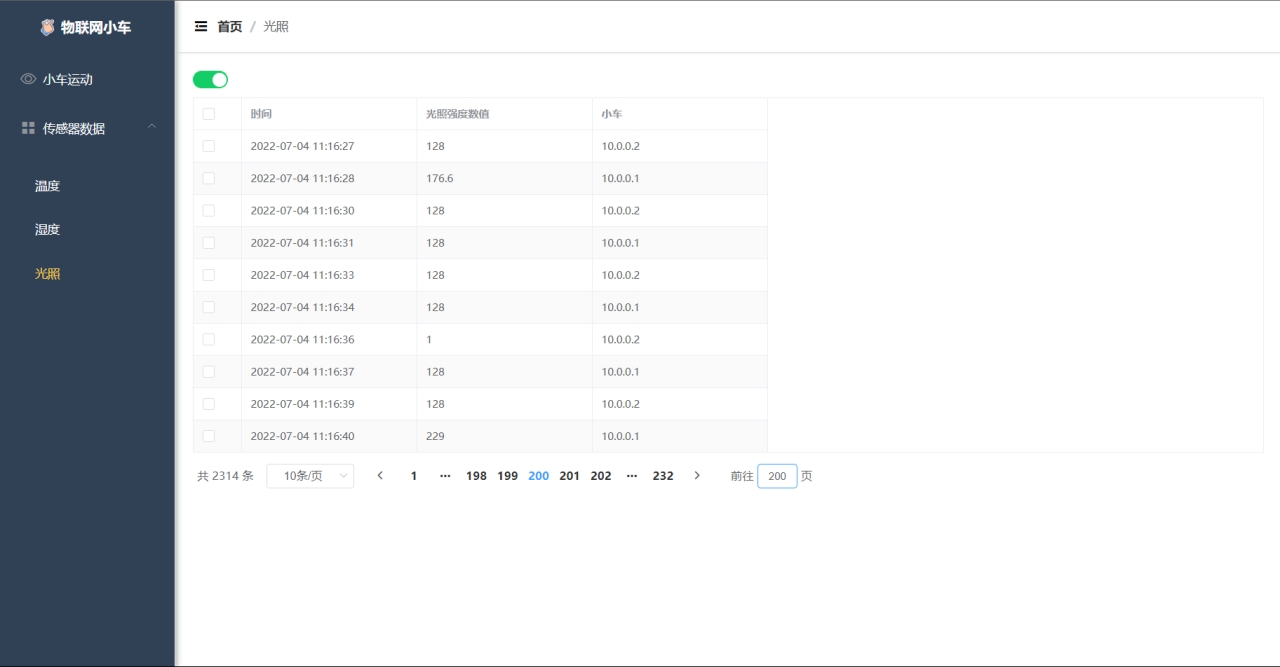
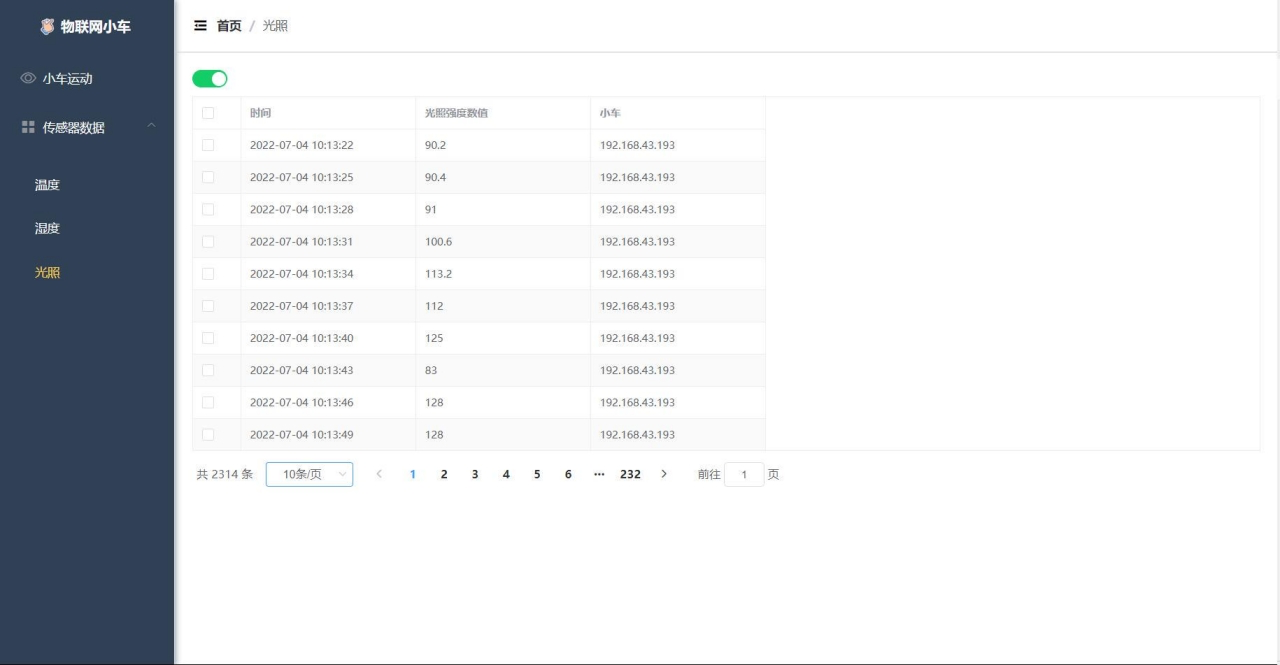
环境监测
前端页面可以实时显示小车传感器监测的环境数据。
后台展示
基站部署了Django写的服务程序,启动服务,如上图;
接收到来自基站的指令:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号