GAMES 201 Lecture 2&3 Lagrangian View
Lecture 2&3 Lagrangian View
目录->我的GAMES201学习笔记
- 上节课的几个小问题:
- 使用 yapf + PEP8 格式化代码
yapf ... .py - 输出.gif或是mp4文件(后续会讲)
- Faster compilation:
ti.core.toggle_advanced optimization(False) //关闭一些advanced的运算优化以提升速度
Lecture 2 Part
Lagrangian Simulation Approaches
- ——>Mass-Spring Systems and smoothed Particle Hydrodynamics
Mass-Spring Sytems
-
原理:
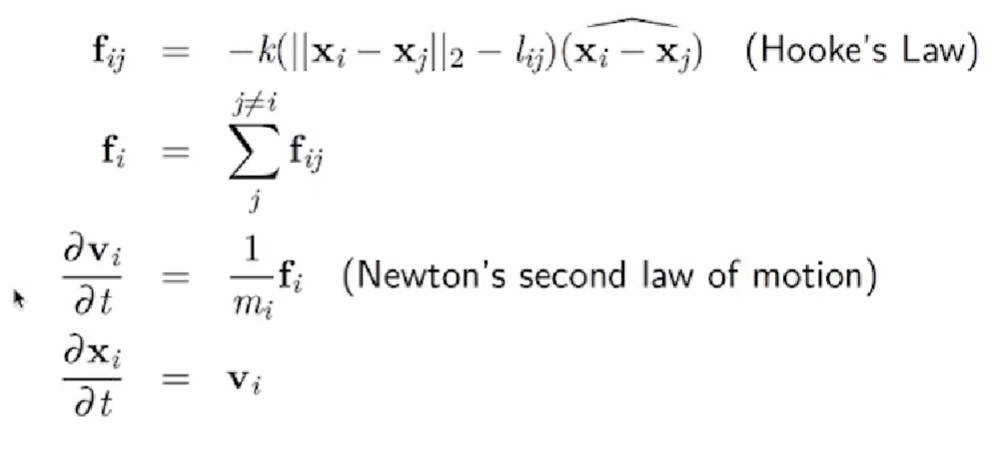
(胡克定律与牛顿第二定律) -
Time Integration
- Forward Euler (explicit)
\(v_{t+1} = v_t+\Delta tm^{-1}f_{t}\)
\(x_{t+1}=x_t+\Delta tv_t\)
main characters about explicit methods (like Forward Euler, Symplectic Euler, RK...):- Future depends only on past.
- Easy to implement.
- Easy to explode : \(\Delta t <= c \sqrt{\frac{m}{k}}\) (c~1) <- 对"硬度"的考量,避免爆炸
- Bad for stiff materials.
- Semi-Implicit Euler(a.k.a. symplectic Euler, actually explicit)
\(v_{t+1}=v_t+\Delta tm^{-1}f_t\)
\(x_{t+1}=x_t+\Delta tv_{t+1}\) - Backward Euler (often with Newton's method, actually implicit)
main characters about implicit methods (like Backward Euler, middle-point...):- Future depends on both future and past.
- Chicken-egg problem: need to solve a system of linear equations.
- In general harder to implement.
- Each step is more expensive but time stpes larger.
- Nmerical damping and locking.
- Mass-Spring System using implicit method:
- \(x_{t+1}=x_t+\Delta tv_{t+1}\) ......(1)
- \(v_{t+1}=v_t+\Delta tM^{-1}f(x_{t+1})\) ......(2)
Eliminate \(x_{t+1}\) : - \(v_{t+1}=v_t+\Delta tM^{-1}f(x_t+\Delta tv_{t+1})\) ......(3)
Linearize (one step of Newton's method):->使用泰勒展开 - \(v_{t+1}=v_t+\Delta tM^{-1}[f(x_t)+\frac{\partial f}{\partial x}(x_t)\Delta tv_{t+1}]\) ......(4)
Clean up(移项): - \([I-\Delta t^2M^{-1}\frac{\partial f}{\partial x}(x_t)]v_{t+1}=v_t+\Delta tM^{-1}f(x_t)\) ......(5)
令
A=\([I-\Delta t^2M^{-1}\frac{\partial f}{\partial x}(x_t)]\)
b=\(v_t+\Delta tM^{-1}f(x_t)\)
得到:
\(Av_{t+1}=b\) (-> a system of linear equations)
Solve it ! :- Jacobi/Gauss-Seidel iterations (easy to implement)
- Conjugate gradients (共轭梯度法 以后会讲)
补充内容:Jacobi迭代法以及实现代码
- \([I-\beta \Delta t^2M^{-1}\frac{\partial f}{\partial x}(x_t)]v_{t+1}=v_t+\Delta tM^{-1}f(x_t)\)
- \(\beta =0\) -> Forward / Semi-implicit Euler
- \(\beta =\frac{1}{2}\) -> Middle-point (implicit)
- \(\beta = 1\) -> Backward Euler(implicit)
- What if we have millions of mass point and springs?
- Sparse matrices
- Conjugate gradients
- Preconditioning
- Use position-based dynamics
A different (yet much faster) approach:
Fast mass_spring system
——————————————Lecture 2 施工中————————————————
Lecture 3 Basics of deformation, elasticity & finite elements
Deformation & Elasticity
- Deformation map \(\phi\) : a (vector to vector) function that relates rest material position and deformed material position. (将rest状态的位置映射到deformed状态的函数)
- \(x_{deformed}=\phi(x_{rest})\)
- Deformation gradient F :
- F:=\(\frac{\partial x_{deformed}}{\partial x_{rest}}\)
※:Deformed gradients are translational invariant,\(\phi_1=\phi(x_{rest})\) and \(\phi_2=\phi(x_{rest})+c\) have the same deformation gradient.
- F:=\(\frac{\partial x_{deformed}}{\partial x_{rest}}\)
- Deform/rest volume ratio J=det(F) -> (J=\(\frac{Deform Volume}{Rest Volume}\))
- Hyperelastic materials:
materials whose stress-strain relationship is defined by a strain energy density function.
(单位体积势能密度)- \(\psi=\psi(F)\)
- Intutive understanding:
- \(\psi\) is a potential function that penalizes deformation.
- "Stress"(应力):the material's internal elastic forces.
- "Strain"(应变):just replace it with deformation gradients F for now.
- ※Be careful: We use \(\psi\) as the strain energy density function and \(\phi\) as the deformation map. They are completely different.
- Stress tensor. -> 二阶张量.(3x3矩阵)
- Stress stands for internal forces that infinitesimal material components exert on their neighborhood.
- The First Piola-Kirchhoff stress tensor (PK1):
\(P(F)=\frac{\partial \psi(F)}{\partial F}\) - Kirchhoff stress:\(\tau\)
- Cauchy stress tensor: \(\sigma\) (symmetirc, because of conservation of angular momentum).
Relationship:- \(\tau = J\sigma=PF^T\)
- \(P=J\sigma F^{-T}\)
(J compensates for material compression expansion,
\(F^{-T}\) compensates for material deformation.) - Traction: \(t = \sigma ^Tn\)
- Elastic moduli (isotropic materials)
- Young's modulus \(E=\frac{\sigma }{\epsilon }\)
- Bulk modulus \(K=-V\frac{\mathrm{d}p}{\mathrm{d}V}\) ->常用于可压缩液体
- Poisson's ratio \(v\in[0.0 , 0.5)\) ->横向正应变与轴向正应变比值
(Auxetics have negative Poissson's ratio)
- Lamé Parameters:
- Lamé's first parameter \(\mu\)
- Lamé's second parameter \(\lambda\) (a.k.a. shear modulus, denot by G)
- Useful conversion formula:
- \(K=\frac{E}{3(1-2v)}\)
————————看完太极图形课后再来更新————————————
待补充内容:太极图形课
课后阅读材料:
-
Lecture 2 :
-
Lecture 3 :

 浙公网安备 33010602011771号
浙公网安备 33010602011771号