DeepLearning.ai-Week2-Residual Networks
1 - Import Packages
import numpy as np from keras import layers from keras.layers import Input, Add, Dense, Activation, ZeroPadding2D, BatchNormalization, Flatten, Conv2D, AveragePooling2D, MaxPooling2D, GlobalMaxPooling2D from keras.models import Model, load_model from keras.preprocessing import image from keras.utils import layer_utils from keras.utils.data_utils import get_file from keras.applications.imagenet_utils import preprocess_input import pydot from IPython.display import SVG from keras.utils.vis_utils import model_to_dot from keras.utils import plot_model from resnets_utils import * from keras.initializers import glorot_uniform import scipy.misc from matplotlib.pyplot import imshow %matplotlib inline import keras.backend as K K.set_image_data_format('channels_last') K.set_learning_phase(1)
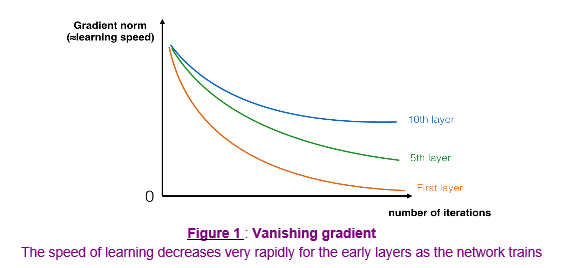
2 - The problem of very deep neural networks
更深的网络可以表示更复杂的函数,可以学习更多层次上的特征表示。但深层网络存在梯度消失或者梯度爆炸问题。随着训练的进行,可以看到网络前面的网络层的梯度迅速下降为0。构建$Residual Network$可以解决这个问题。
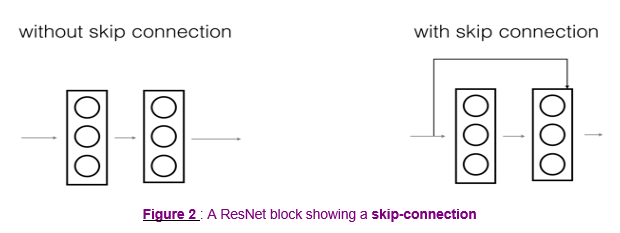
3 - Building a Residual Network
$Residual Network$中通过跳远连接(捷径)避免梯度消失/爆炸。跳远连接使得学习恒等函数也变得容易,所以更深的网络可以确保其效率和性能至少不低于比更浅的网络。
3.1 - The identity block
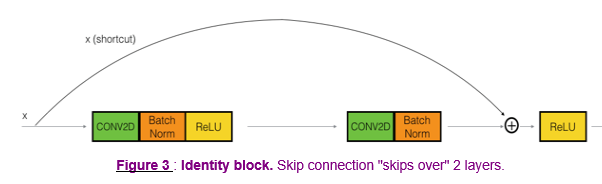

# GRADED FUNCTION: identity_block def identity_block(X, f, filters, stage, block): """ Implementation of the identity block as defined in Figure 3 Arguments: X -- input tensor of shape (m, n_H_prev, n_W_prev, n_C_prev) f -- integer, specifying the shape of the middle CONV's window for the main path filters -- python list of integers, defining the number of filters in the CONV layers of the main path stage -- integer, used to name the layers, depending on their position in the network block -- string/character, used to name the layers, depending on their position in the network Returns: X -- output of the identity block, tensor of shape (n_H, n_W, n_C) """ # defining name basis conv_name_base = 'res' + str(stage) + block + '_branch' bn_name_base = 'bn' + str(stage) + block + '_branch' # Retrieve Filters F1, F2, F3 = filters # Save the input value. You'll need this later to add back to the main path. X_shortcut = X # First component of main path X = Conv2D(filters = F1, kernel_size = (1, 1), strides = (1,1), padding = "valid", name = conv_name_base + "2a", kernel_initializer = glorot_uniform(seed=0))(X) X = BatchNormalization(axis = 3, name = bn_name_base + "2a")(X) X = Activation("relu")(X) ### START CODE HERE ### # Second component of main path (≈3 lines) X = Conv2D(filters = F2, kernel_size = (f, f), strides = (1, 1), padding = "same", name = conv_name_base + "2b", kernel_initializer = glorot_uniform(seed=0))(X) X = BatchNormalization(axis = 3, name = bn_name_base + "2b")(X) X = Activation("relu")(X) # Third component of main path (≈2 lines) X = Conv2D(filters = F3, kernel_size = (1, 1), strides = (1, 1), padding = "valid", name = conv_name_base + "2c", kernel_initializer = glorot_uniform(seed=0))(X) X = BatchNormalization(axis = 3, name = bn_name_base + "2c")(X) # Final step: Add shortcut value to main path, and pass it through a RELU activation (≈2 lines) X = Add()([X, X_shortcut]) X = Activation("relu")(X) ### END CODE HERE ### return X
Result:
out = [ 0.94822997 0. 1.16101444 2.747859 0. 1.36677003]
3.2 - The convolutional block
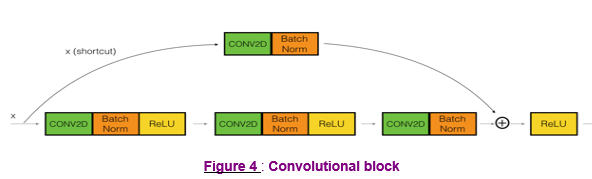
# GRADED FUNCTION: convolutional_block def convolutional_block(X, f, filters, stage, block, s = 2): """ Implementation of the convolutional block as defined in Figure 4 Arguments: X -- input tensor of shape (m, n_H_prev, n_W_prev, n_C_prev) f -- integer, specifying the shape of the middle CONV's window for the main path filters -- python list of integers, defining the number of filters in the CONV layers of the main path stage -- integer, used to name the layers, depending on their position in the network block -- string/character, used to name the layers, depending on their position in the network s -- Integer, specifying the stride to be used Returns: X -- output of the convolutional block, tensor of shape (n_H, n_W, n_C) """ # defining name basis conv_name_base = 'res' + str(stage) + block + '_branch' bn_name_base = 'bn' + str(stage) + block + '_branch' # Retrieve Filters F1, F2, F3 = filters # Save the input value X_shortcut = X ##### MAIN PATH ##### # First component of main path X = Conv2D(F1, (1, 1), strides = (s, s), padding="valid", name = conv_name_base + "2a", kernel_initializer = glorot_uniform(seed=0))(X) X = BatchNormalization(axis = 3, name = bn_name_base + "2a")(X) X = Activation("relu")(X) ### START CODE HERE ### # Second component of main path (≈3 lines) X = Conv2D(F2, (f, f), strides = (1, 1), padding="same", name = conv_name_base + "2b", kernel_initializer = glorot_uniform(seed=0))(X) X = BatchNormalization(axis = 3, name = bn_name_base + "2b")(X) X = Activation("relu")(X) # Third component of main path (≈2 lines) X = Conv2D(F3, (1, 1), strides = (1, 1), padding="valid", name = conv_name_base + "2c", kernel_initializer = glorot_uniform(seed=0))(X) X = BatchNormalization(axis = 3, name = bn_name_base + "2c")(X) ##### SHORTCUT PATH #### (≈2 lines) X_shortcut = Conv2D(F3, (1, 1), strides = (s, s), padding="valid", name = conv_name_base + "1", kernel_initializer = glorot_uniform(seed=0))(X_shortcut) X_shortcut = BatchNormalization(axis = 3, name = bn_name_base + "1")(X_shortcut) # Final step: Add shortcut value to main path, and pass it through a RELU activation (≈2 lines) X = Add()([X, X_shortcut]) X = Activation("relu")(X) ### END CODE HERE ### return X
tf.reset_default_graph() with tf.Session() as test: np.random.seed(1) A_prev = tf.placeholder("float", [3, 4, 4, 6]) X = np.random.randn(3, 4, 4, 6) A = convolutional_block(A_prev, f = 2, filters = [2, 4, 6], stage = 1, block = 'a') test.run(tf.global_variables_initializer()) out = test.run([A], feed_dict={A_prev: X, K.learning_phase(): 0}) print("out = " + str(out[0][1][1][0]))
Result:
out = [ 0.09018463 1.23489785 0.46822023 0.03671762 0. 0.65516603]
4 - Building your first ResNet model (50 layers)
"ID BLOCK"代表"Identity block","ID BLOCK x3"代表需要堆叠3个"Identity block"在一起。

# GRADED FUNCTION: ResNet50 def ResNet50(input_shape = (64, 64, 3), classes = 6): """ Implementation of the popular ResNet50 the following architecture: CONV2D -> BATCHNORM -> RELU -> MAXPOOL -> CONVBLOCK -> IDBLOCK*2 -> CONVBLOCK -> IDBLOCK*3 -> CONVBLOCK -> IDBLOCK*5 -> CONVBLOCK -> IDBLOCK*2 -> AVGPOOL -> TOPLAYER Arguments: input_shape -- shape of the images of the dataset classes -- integer, number of classes Returns: model -- a Model() instance in Keras """ # Define the input as a tensor with shape input_shape X_input = Input(input_shape) # Zero-Padding X = ZeroPadding2D((3, 3))(X_input) # Stage 1 X = Conv2D(64, (7, 7), strides = (2, 2), name = "conv1", kernel_initializer = glorot_uniform(seed=0))(X) X = BatchNormalization(axis = 3, name = "bn_conv1")(X) X = Activation("relu")(X) X = MaxPooling2D((3, 3), strides=(2, 2))(X) # Stage 2 X = convolutional_block(X, f = 3, filters = [64, 64, 256], stage = 2, block="a", s = 1) X = identity_block(X, 3, [64, 64, 256], stage=2, block='b') X = identity_block(X, 3, [64, 64, 256], stage=2, block='c') ### START CODE HERE ### # Stage 3 (≈4 lines) X = convolutional_block(X, f = 3, filters = [128, 128, 512], stage = 3, block = "a", s = 2) X = identity_block(X, 3, [128, 128, 512], stage=3, block="b") X = identity_block(X, 3, [128, 128, 512], stage=3, block="c") X = identity_block(X, 3, [128, 128, 512], stage=3, block="d") # Stage 4 (≈6 lines) X = convolutional_block(X, f = 3, filters = [256, 256, 1024], stage = 4, block = "a", s = 2) X = identity_block(X, 3, [256, 256, 1024], stage=4, block="b") X = identity_block(X, 3, [256, 256, 1024], stage=4, block="c") X = identity_block(X, 3, [256, 256, 1024], stage=4, block="d") X = identity_block(X, 3, [256, 256, 1024], stage=4, block="e") X = identity_block(X, 3, [256, 256, 1024], stage=4, block="f") # Stage 5 (≈3 lines) X = convolutional_block(X, f = 3, filters = [512, 512, 2048], stage = 5, block = "a", s = 2) X = identity_block(X, 3, [512, 512, 2048], stage=5, block="b") X = identity_block(X, 3, [512, 512, 2048], stage=5, block="c") # AVGPOOL (≈1 line). Use "X = AveragePooling2D(...)(X)" X = AveragePooling2D(pool_size=(2, 2), name="avg_pool")(X) ### END CODE HERE ### # output layer X = Flatten()(X) X = Dense(classes, activation="softmax", name="fc" + str(classes), kernel_initializer = glorot_uniform(seed=0))(X) # Create model model = Model(inputs = X_input, outputs = X, name="ResNet50") return model
model = ResNet50(input_shape = (64, 64, 3), classes = 6)
model.compile(optimizer='adam', loss='categorical_crossentropy', metrics=['accuracy'])
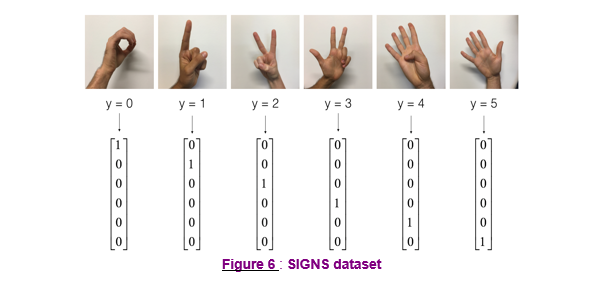
X_train_orig, Y_train_orig, X_test_orig, Y_test_orig, classes = load_dataset() # Normalize image vectors X_train = X_train_orig/255. X_test = X_test_orig/255. # Convert training and test labels to one hot matrices Y_train = convert_to_one_hot(Y_train_orig, 6).T Y_test = convert_to_one_hot(Y_test_orig, 6).T print ("number of training examples = " + str(X_train.shape[0])) print ("number of test examples = " + str(X_test.shape[0])) print ("X_train shape: " + str(X_train.shape)) print ("Y_train shape: " + str(Y_train.shape)) print ("X_test shape: " + str(X_test.shape)) print ("Y_test shape: " + str(Y_test.shape))
Result: number of training examples = 1080 number of test examples = 120 X_train shape: (1080, 64, 64, 3) Y_train shape: (1080, 6) X_test shape: (120, 64, 64, 3) Y_test shape: (120, 6)
SIGNS Dataset
model.fit(X_train, Y_train, epochs = 2, batch_size = 32)
Result:
preds = model.evaluate(X_test, Y_test) print ("Loss = " + str(preds[0])) print ("Test Accuracy = " + str(preds[1]))
Result:
120/120 [==============================] - 8s 68ms/step
Loss = 13.4317462285
Test Accuracy = 0.166666667163
model = load_model('ResNet50.h5')
preds = model.evaluate(X_test, Y_test) print ("Loss = " + str(preds[0])) print ("Test Accuracy = " + str(preds[1]))
Result:
5 - Summary
model.summary()
Result:
(略)
plot_model(model, to_file='model.png') SVG(model_to_dot(model).create(prog='dot', format='svg'))
Result:
(略)
(略)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号