皇家理工学院提出无需里程计,仅IMU实现在线多激光雷达标定方案!
2023-04-03 14:26 计算机视觉life 阅读(124) 评论(0) 收藏 举报 皇家理工学院提出无需里程计,仅IMU实现在线多激光雷达标定方案!
皇家理工学院提出无需里程计,仅IMU实现在线多激光雷达标定方案!
以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# IMU-based online multi-lidar calibration without lidar odometry
论文地址:https://arxiv.org/abs/2302.14735
作者单位:皇家理工学院
当部署需要多个传感器进行感知的自主系统时,需要准确可靠的外部标定。在这项研究中,我们提供了一种可靠的技术,可以在不使用里程计估计或基准标记的情况下,在移动车辆的底架中对多个激光雷达进行外部标定。我们的方法基于比较激光雷达中的并置IMU和车辆中GNSS系统的IMU测量值之间的原始IMU信号。此外,基于我们的可观测性标准,我们选择包含最多相互信息的测量值,而不是比较所有可比较的IMU读数。这使我们能够定位对实时标定最有用的测量值。利用从斯堪尼亚测试车上收集的各种传感器设置数据,我们成功验证了我们的方法。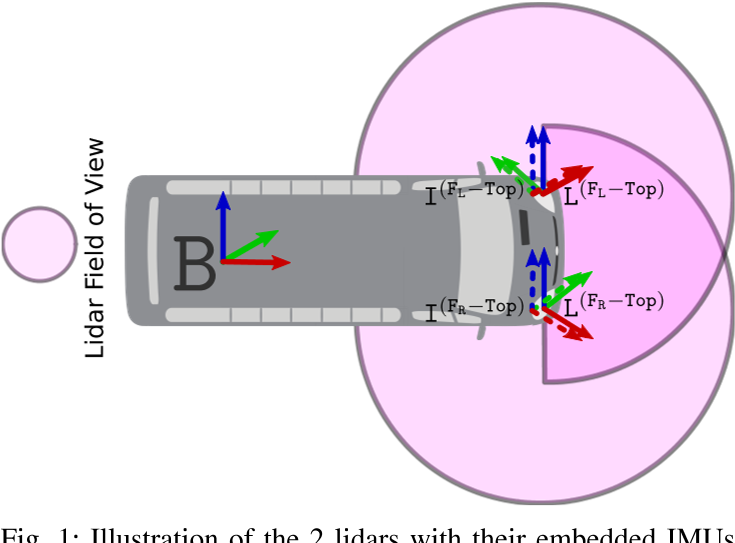



 浙公网安备 33010602011771号
浙公网安备 33010602011771号