
香港大学提出了一种基于LiDAR的无人机模拟器,用于在轻量级计算平台上进行真实环境仿真
2023-03-20 13:18 计算机视觉life 阅读(260) 评论(0) 收藏 举报 香港大学提出了一种基于LiDAR的无人机模拟器,用于在轻量级计算平台上进行真实环境仿真
香港大学提出了一种基于LiDAR的无人机模拟器,用于在轻量级计算平台上进行真实环境仿真
以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
香港大学提出了一种基于LiDAR的无人机模拟器,用于在轻量级计算平台上进行真实环境仿真,提供了10幅高分辨率的点云图,并支持对各种类型的激光雷达传感器、动态障碍物和多无人机的模拟,代码开源!
论文#开源代码# MARSIM: A light-weight point-realistic simulator for LiDAR-based UAVs
论文地址:https://arxiv.org/abs/2211.10716
作者单位:香港大学
开源仿真:https://github.com/hku-mars/MARSIM
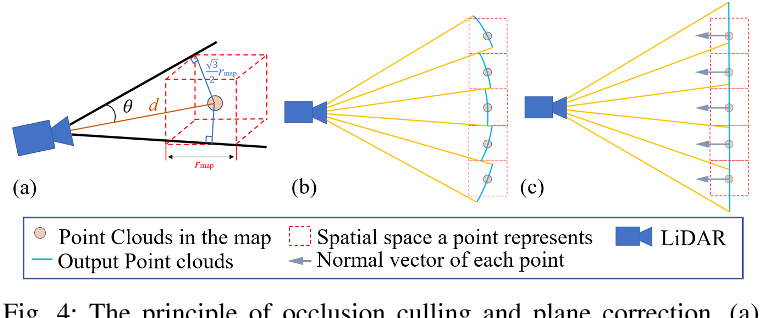
低成本、体积小、重量轻的固态激光雷达传感器的出现,为自主无人机带来了新的机遇,提高了导航安全性和计算效率。然而,基于激光雷达的无人机的成功开发必须依赖于广泛的模拟。由于难以获得稠密的网格贴图,现有的模拟器很难对真实世界的环境进行模拟。在本文中,我们为基于LiDAR的无人机开发了一个真实场景的点真实感模拟器。其核心思想是底层点绘制方法,我们直接从点云图构造深度图像,并对其进行内插,以获得逼真的LiDAR点测量结果。
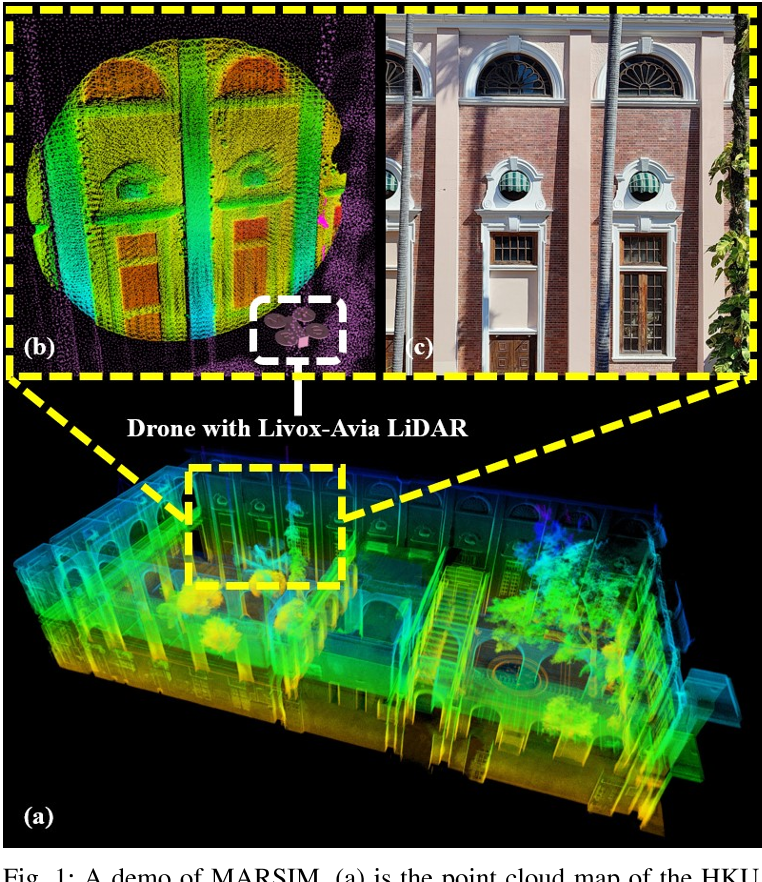
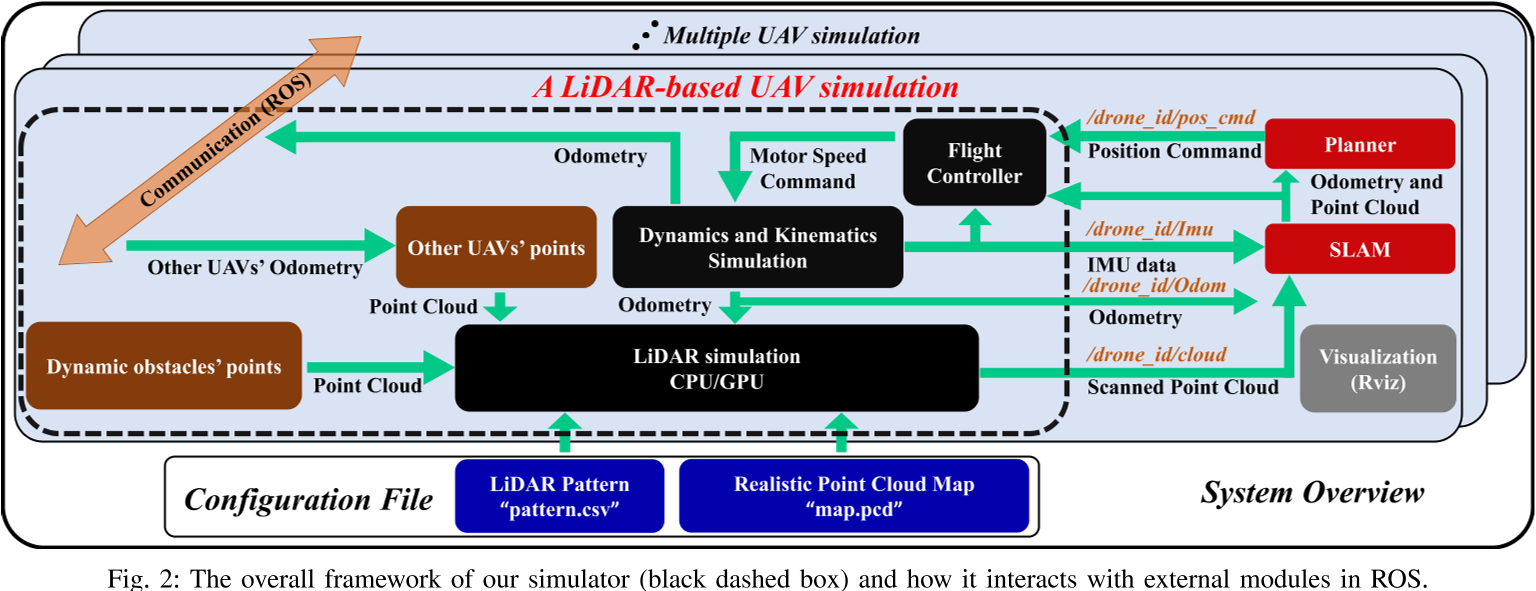
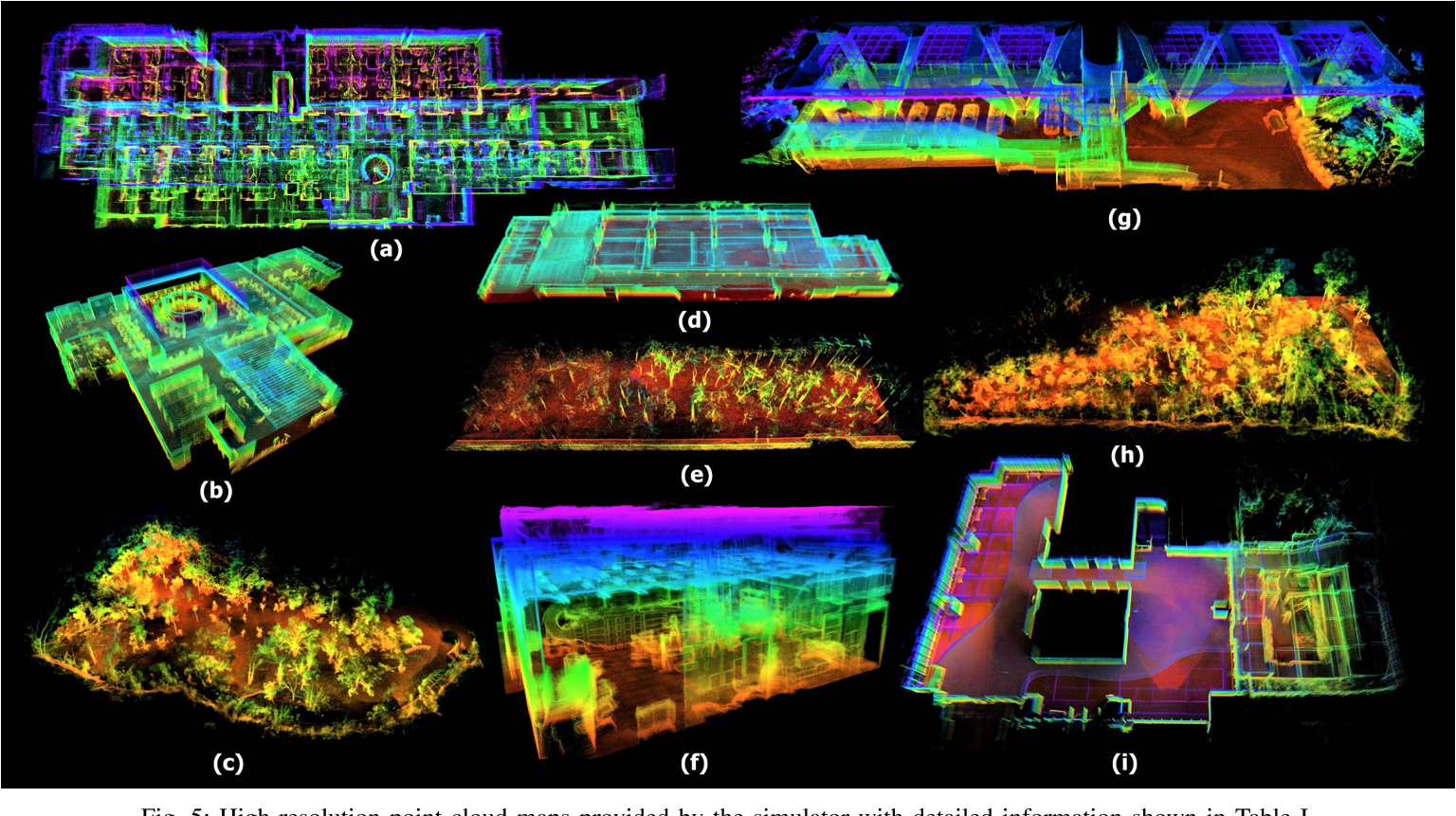
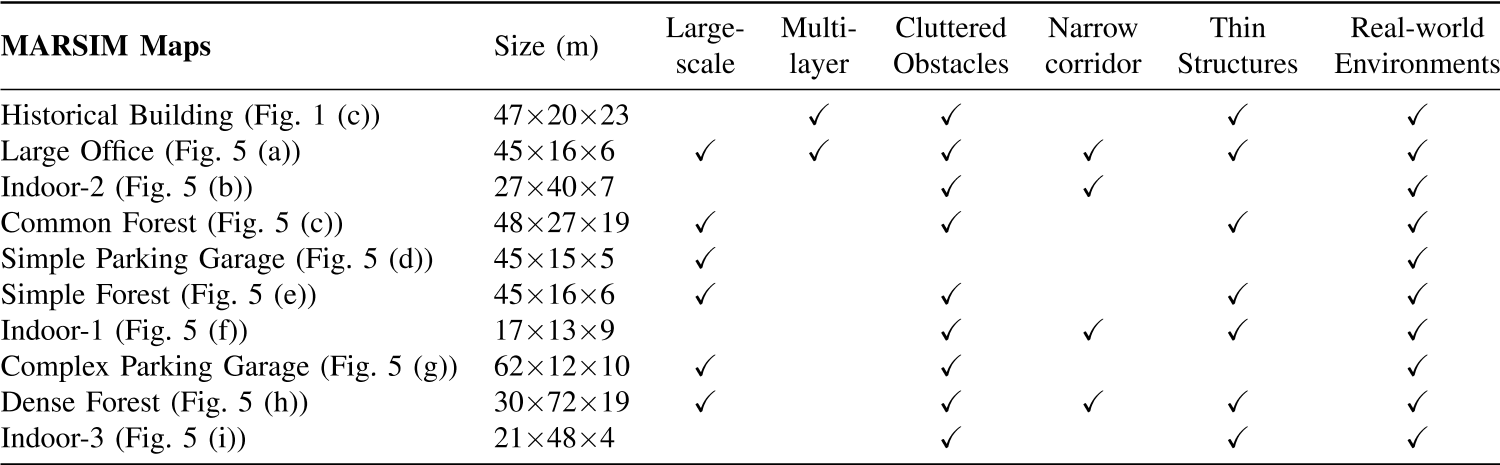
我们开发的模拟器能够在轻量级计算平台上运行,并支持不同分辨率和扫描模式的激光雷达(如旋转激光雷达和固态激光雷达)、动态障碍物和多无人机系统的仿真。在ROS框架下开发的仿真器可以很容易地与自主机器人的其他关键模块进行通信,如感知、状态估计、规划和控制。最后,该模拟器提供了10幅高分辨率的各种真实环境的点云地图,包括不同密度的森林、历史建筑、办公室、停车场和各种复杂的室内环境。
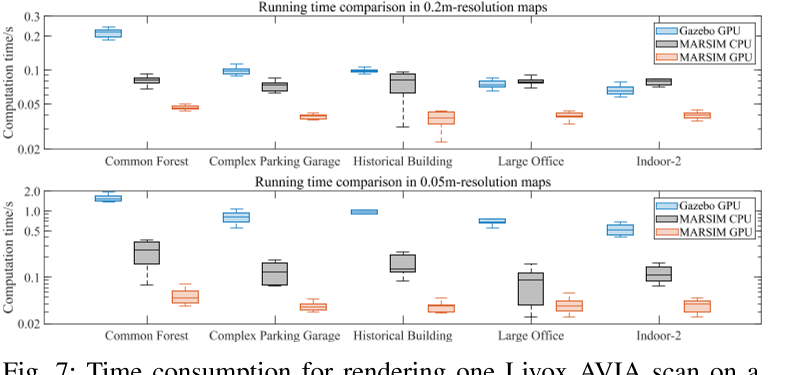
这些逼真的地图为自主无人机提供了不同的测试场景。评估结果表明,与Gazebo相比,所开发的模拟器在时间和内存消耗方面具有优越的性能,并且模拟的无人机飞行与真实环境中的实际飞行高度吻合。我们相信,这种逼真、轻量化的模拟器对于弥合无人机仿真和实验之间的差距至关重要,并将极大地促进未来基于LiDAR的自主无人机的研究。
本文贡献如下:
1、直接利用真实环境的点云图来渲染逼真的LiDAR扫描。点云地图保留了环境的精细细节,可以使用激光雷达传感器轻松获取。
2、计算和内存消耗效率高,无需专用图形处理器(GPU)板即可在个人电脑上运行。
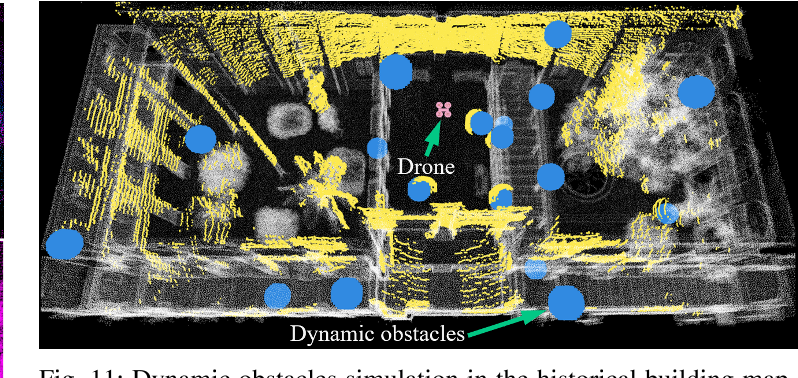
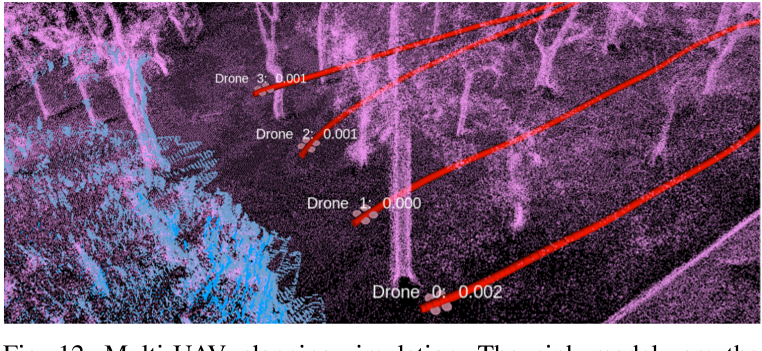
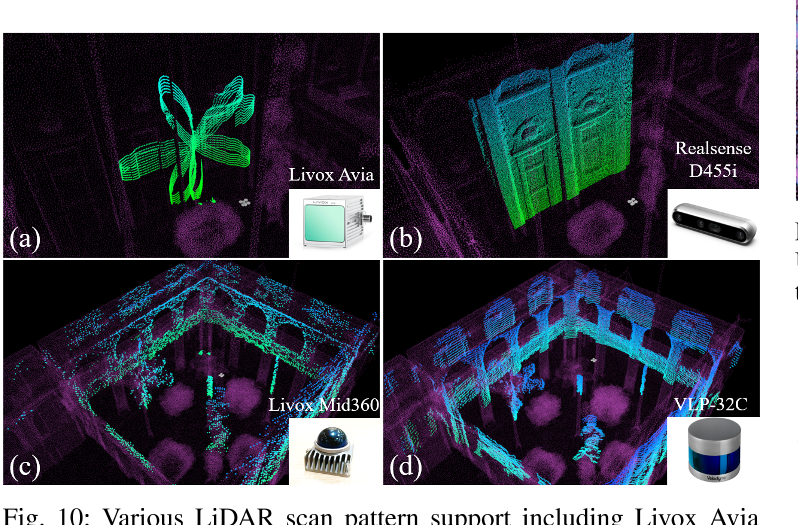
3、多功能,支持动态障碍物、多无人机系统以及各种现有不同分辨率和扫描模式的LiDAR模型(Livox AVIA、Livox MID-360、Velodyne VLP-32、IntelRealSense D455等)的模拟。
4、开源,兼容ROS。用户可以很容易地将模拟器与他们在ROS中开发的模块集成在一起,如同步定位和地图(SLAM)模块和路径规划模块,并在真实的仿真环境中快速进行评估。
以上内容来自小六的机器人SLAM学习圈 每日更新内容

 浙公网安备 33010602011771号
浙公网安备 33010602011771号