香港大学火星实验室最新开源LiDAR-惯性SLAM,可实时重建环境网格!
2023-03-07 10:47 计算机视觉life 阅读(674) 评论(0) 收藏 举报 香港大学火星实验室最新开源LiDAR-惯性SLAM,可实时重建环境网格!
香港大学火星实验室最新开源LiDAR-惯性SLAM,可实时重建环境网格!
以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文##开源代码# ImMesh: An Immediate LiDAR Localization and Meshing Framework
论文地址:https://arxiv.org/abs/2301.05206
作者单位:香港大学
开源代码:GitHub - hku-mars/ImMesh: ImMesh: An Immediate LiD...
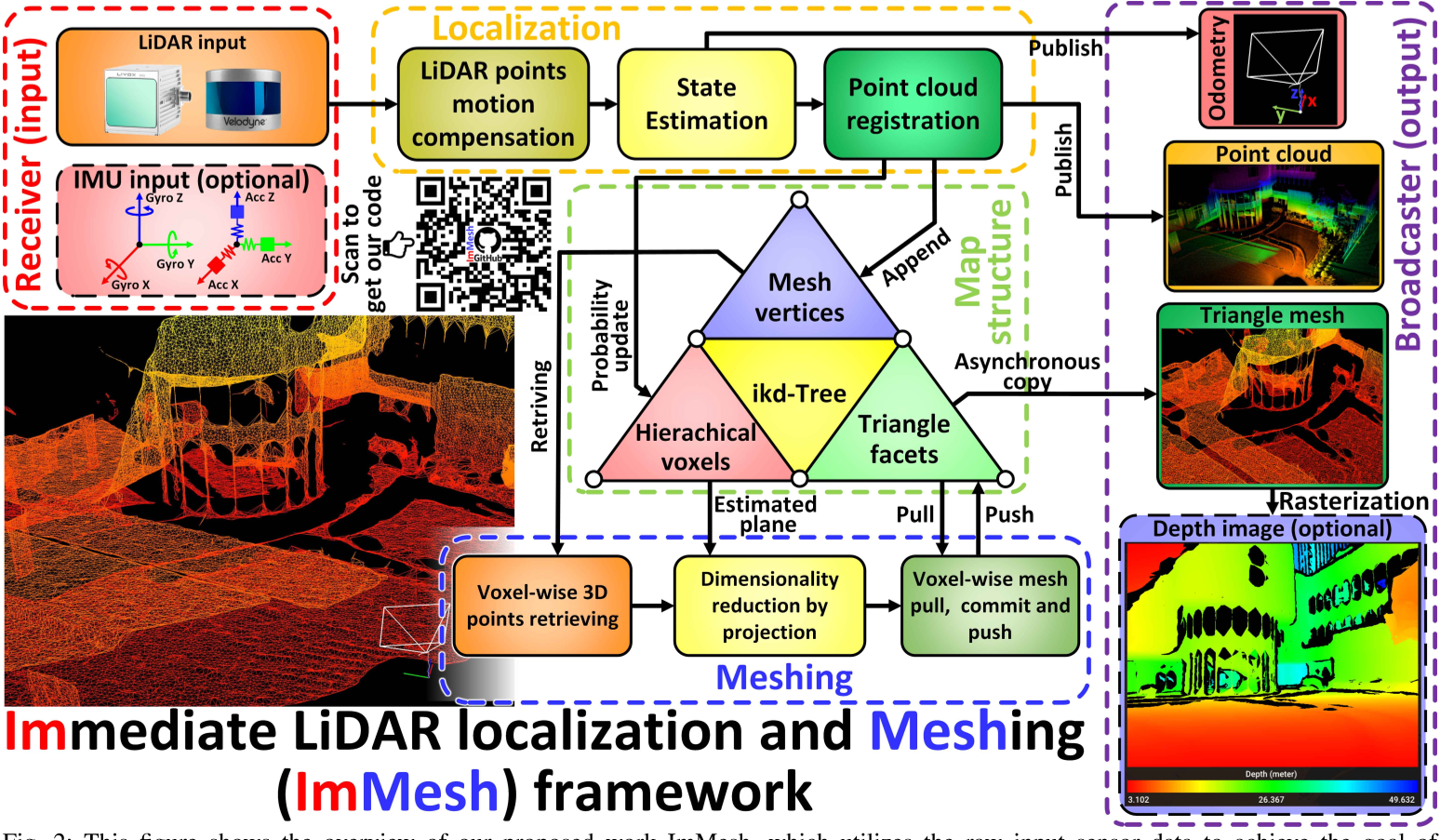
在本文中,我们提出了一种新颖的LiDAR(-惯性)里程计和建图框架,以实现实时定位和网格划分的目标。这个被称为IMMesh的框架由四个紧密耦合的模块组成:接收器、本地化、网状化和广播器。定位模块利用来自接收器的先验传感器数据,通过将LiDAR扫描配准到地图来在线估计传感器姿态,并动态增长地图。然后,我们的网格划分模块进行注册的LiDAR扫描,以动态增量地重建三角形网格。最后,实时里程计、地图和网格通过我们的广播员发布。
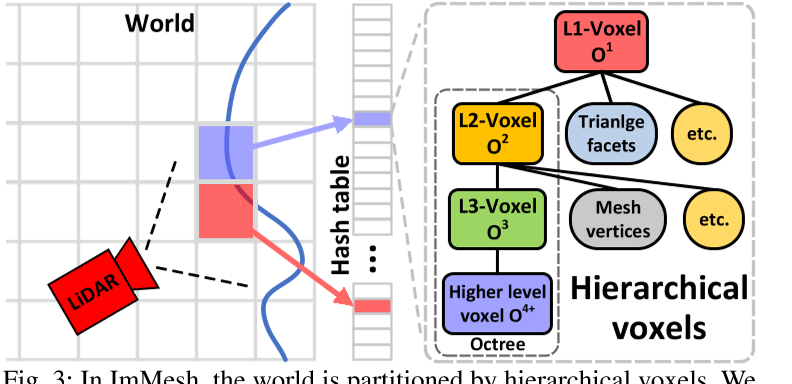
这项工作的关键贡献是网格划分模块,该模块通过一种高效的层次化体素结构来表示场景,执行新扫描观察到的体素的快速查找,并以增量的方式重建每个体素中的三角面片。这种体素网格化操作是为提高效率而精心设计的;它首先通过将3D点投影到体素中包含的2D局部平面来执行降维,然后执行网格化操作,使用Pull、Commit和Push步骤进行三角面片的增量重建。据我们所知,这是文献中第一个可以在线重建大规模场景的三角形网格的工作,只需依靠标准的CPU而不需要GPU加速。本文贡献如下:
1、我们提出了一种新颖的系统,可以在线估计传感器的姿态和重建周围环境的网格。它的本地化是建立在我们以前的工作VoxelMap的基础上的,它可以比其他同类方法(例如FAST-LIO2、SUMA、Mulls、Lego-Loam等)更高效、更准确地估计传感器的姿态。它的网格划分模块实现了一种新颖的网格重建方法,该方法以增量的方式高效地重建网格,并能在标准桌面CPU上实现大规模场景的实时性能。
2、我们在网格划分模块中实现了一种新的网格重建方法,该方法直接利用注册的LiDAR点作为网格顶点,在线重建网格三角形面片(即,三个三角点的索引)以递增的方式。具体地说,我们的网格化模块首先利用一种高效的层次化体素数据结构来快速找到新扫描中包含点的体素。然后,通过降维将体素三维网格问题转化为二维网格问题。最后,使用体素网格的Pull、Commit和Push步骤增量地重建三角形面片。
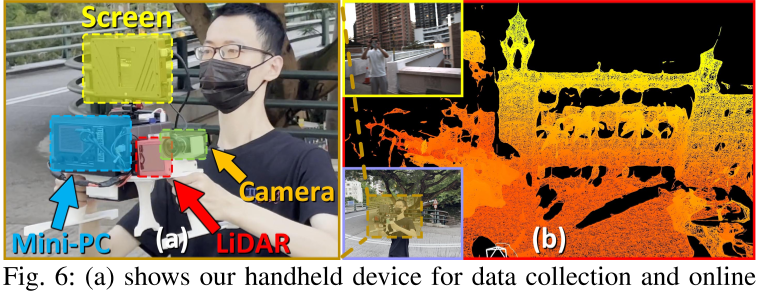
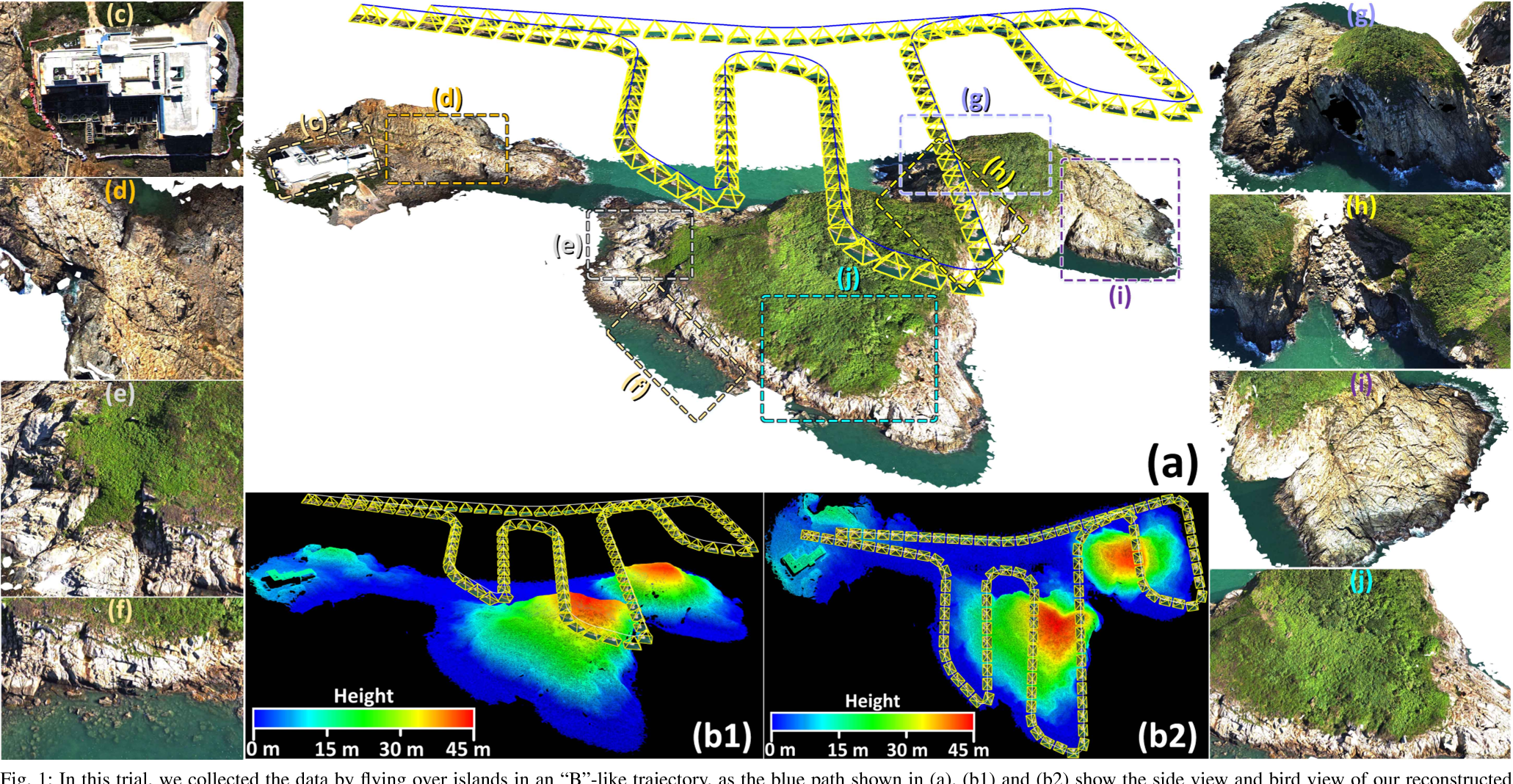
3、通过大量的实验对IMMesh的运行时间性能和网格划分精度进行了评估。我们首先通过提供实时视频演示来验证整体性能,演示如何在数据收集过程中立即重建网格。然后,我们使用在不同场景中使用不同类型的激光雷达收集的四个公共数据集对IMMesh进行了广泛的测试。最后,我们通过与现有基线的比较来评估IMMesh的运行时间性能和网格划分精度。
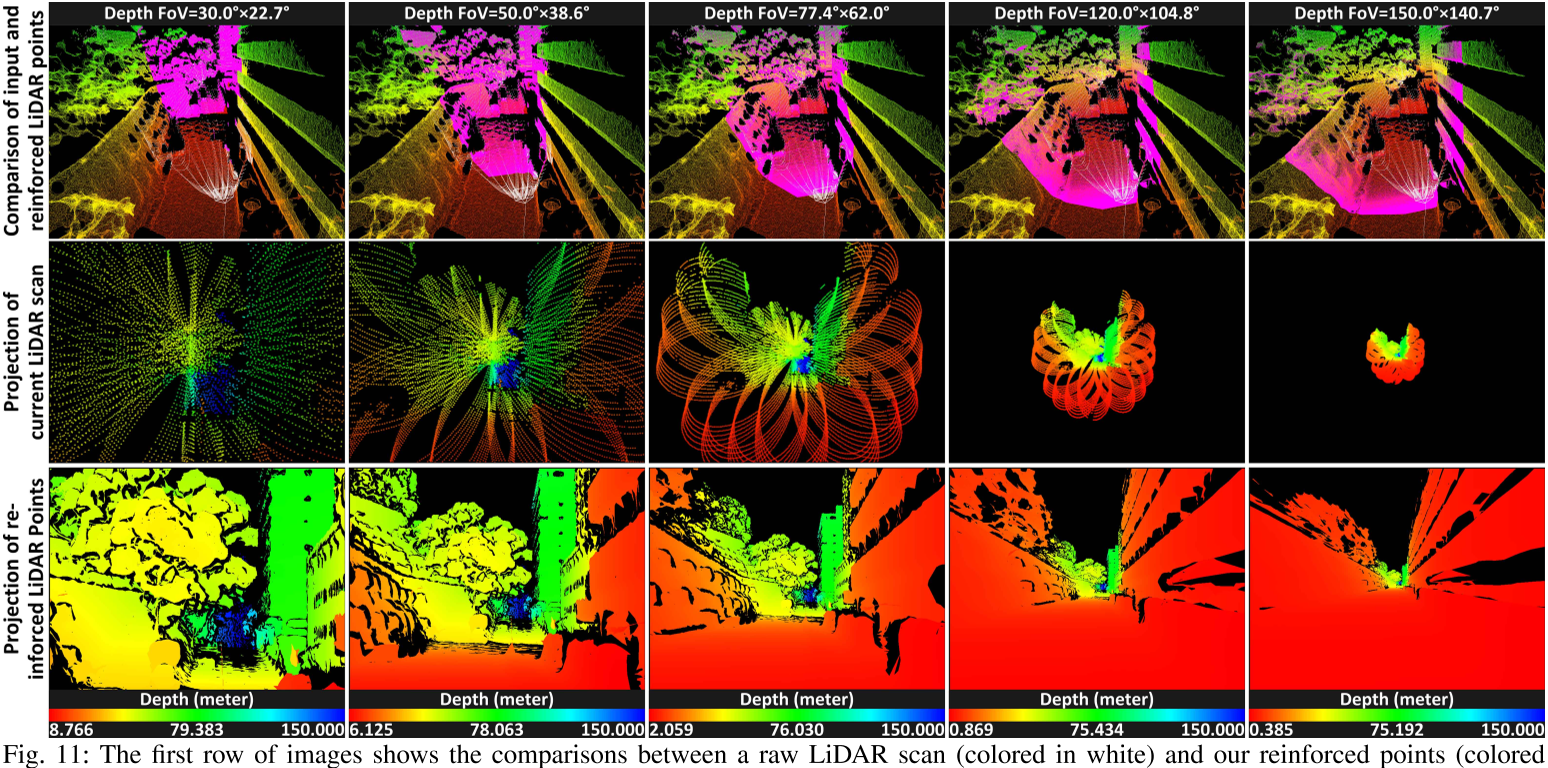
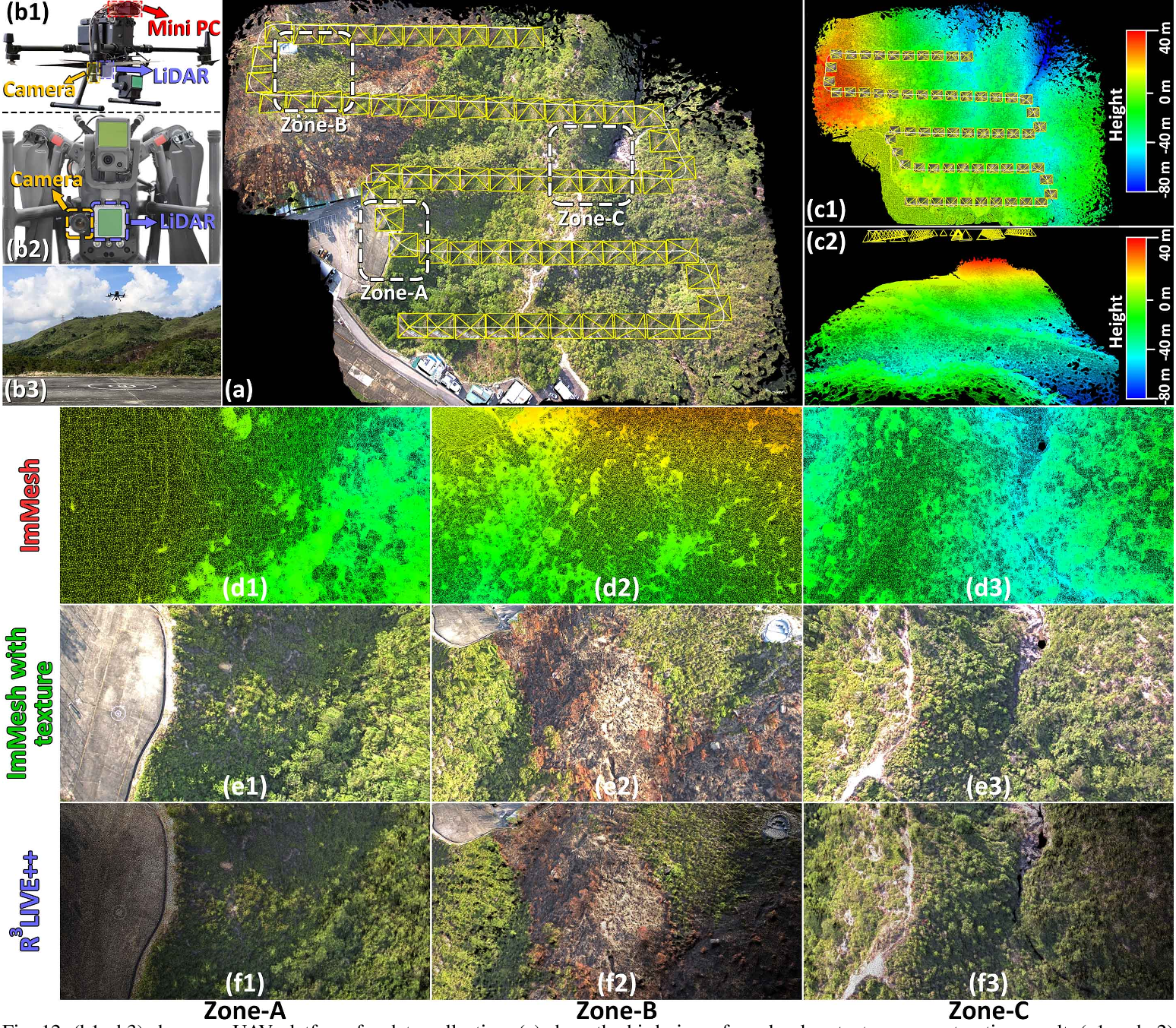
4、此外,我们还通过两个实际例子演示了实时网格如何应用于潜在的应用。我们首先证明了IMMesh可以应用于LiDAR点云增强,它可以以规则的方式输出增强的点,并且与原始的LiDAR扫描相比,具有更高的密度和更宽的视场。然后,我们将IMMesh和我们以前的工作R3LIVE结合起来,实现了场景的无损纹理重建。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号