
蒙特利尔大学提出强度图像-LiDAR SLAM,针对低纹理和非结构化环境!
2023-03-02 14:05 计算机视觉life 阅读(171) 评论(0) 编辑 收藏 举报 蒙特利尔大学提出强度图像-LiDAR SLAM,针对低纹理和非结构化环境!
蒙特利尔大学提出强度图像-LiDAR SLAM,针对低纹理和非结构化环境!
以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# Real-Time Simultaneous Localization and Mapping with LiDAR intensity
论文地址:https://arxiv.org/pdf/2301.09257.pdf
作者单位:蒙特利尔大学
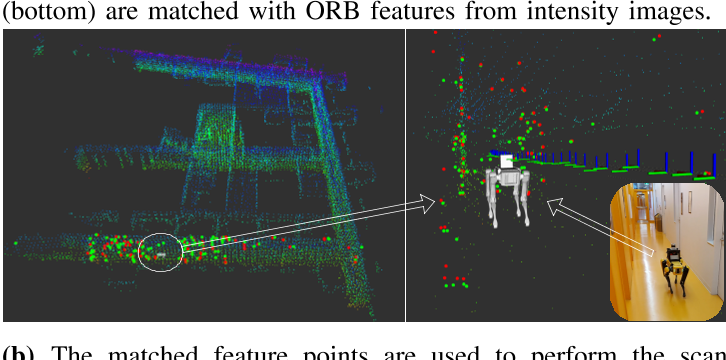
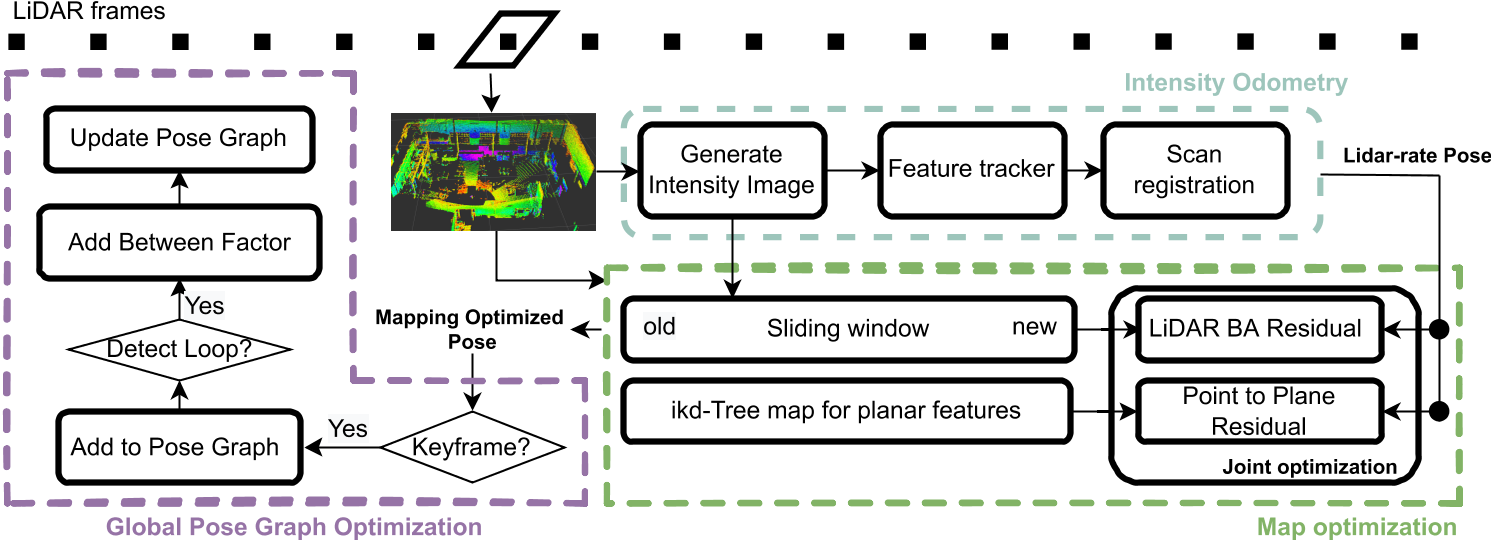
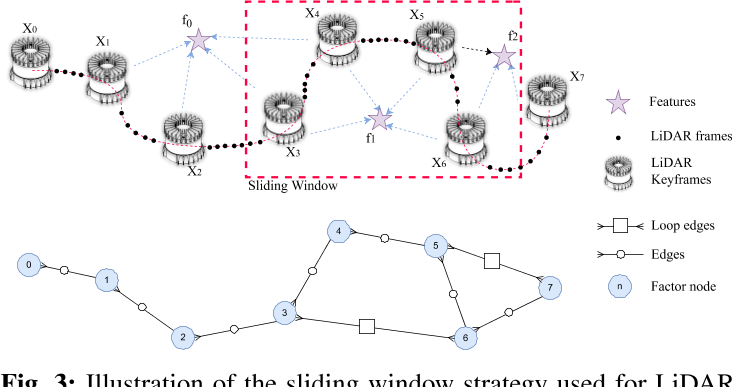
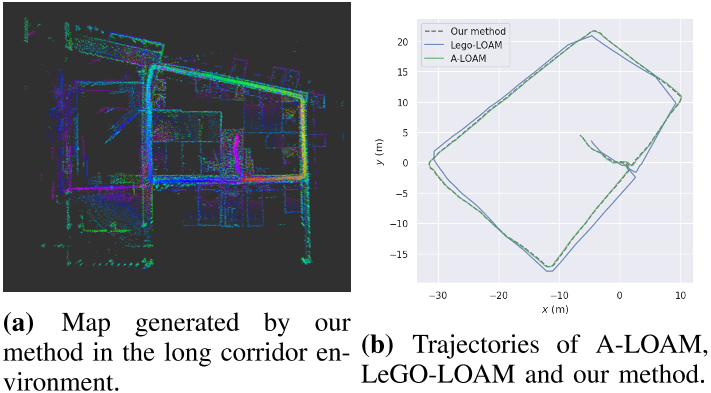
针对非结构化环境中的几何退化问题,提出了一种新的基于激光雷达强度图像的实时同步定位与建图方法。传统的基于激光雷达的前端里程测量大多依赖于点、线、面等几何特征。环境中缺乏这些功能可能会导致整个里程计系统的故障。为了避免这个问题,我们从激光雷达生成的点云中提取与激光雷达强度图像中识别的特征相匹配的特征点。然后利用提取的特征点进行配准,估计机器人的运动。对于后端,我们联合优化相应特征点之间的距离,以及地图中标识的平面的点到面距离。
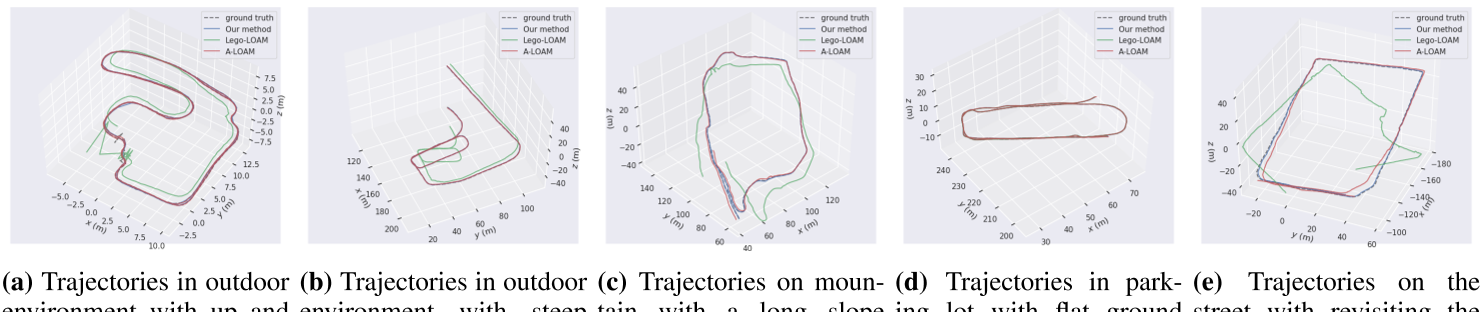
此外,我们使用从强度图像中提取的特征来检测先前扫描中的回环候选对象,并执行位姿图优化。实验表明,该方法具有较高的实时性和较高的准确率,对光照变化、低纹理和非结构化环境具有很好的效果。
本文贡献如下:
1、一种新颖的基于强度图像的实时LiDAR SLAM系统,旨在解决几何退化问题;
2、将视觉SLAM系统的优点结合到LiDAR SLAM系统中,而不会受到模糊或光照变化的影响;
3、由于特征点较少,并在后端添加了地平面约束和LiDAR BA,因此前端较轻;
4、基于强度的回环检测检测和位姿图优化;


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 周边上新:园子的第一款马克杯温暖上架
· 分享 3 个 .NET 开源的文件压缩处理库,助力快速实现文件压缩解压功能!
· Ollama——大语言模型本地部署的极速利器
· DeepSeek如何颠覆传统软件测试?测试工程师会被淘汰吗?
· 使用C#创建一个MCP客户端