浙江大学提出基于iEKF的轻量级LiDAR惯性里程计,支持退化环境,模块话传感器融合
2023-02-24 10:11 计算机视觉life 阅读(221) 评论(0) 收藏 举报 浙江大学提出基于iEKF的轻量级LiDAR惯性里程计,支持退化环境,模块话传感器融合
浙江大学提出基于iEKF的轻量级LiDAR惯性里程计,支持退化环境,模块话传感器融合
以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# DAMS-LIO: A Degeneration-Aware and Modular Sensor-Fusion LiDAR-inertial Odometry
论文地址:https://arxiv.org/abs/2302.01703
作者单位:浙江大学
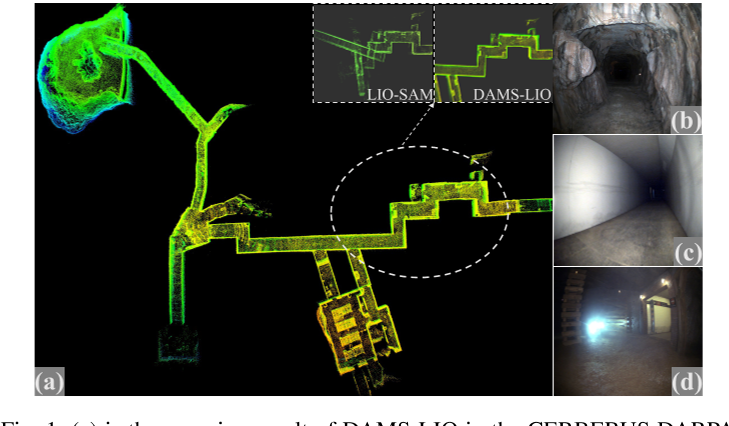
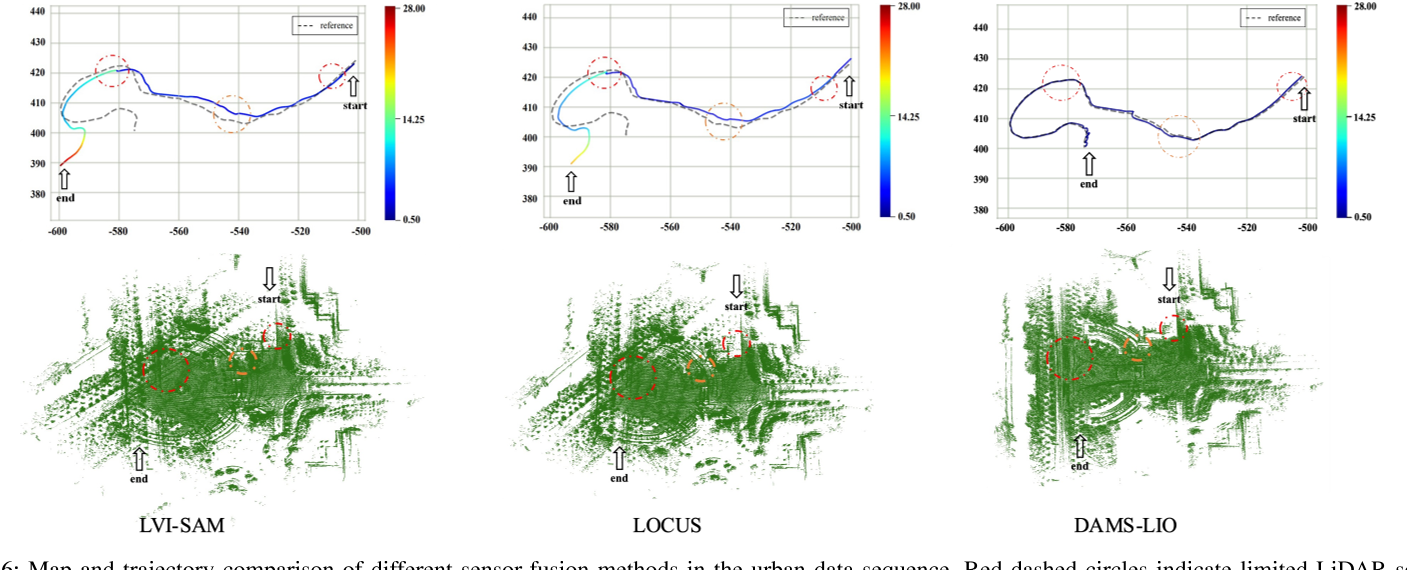
融合方案是多传感器融合方法的关键,多传感器融合方法是地下矿山和行星表面等复杂极端环境下状态估计的最有前途的解决方案。本文提出了一种基于iEKF的轻量级LiDAR惯性里程计系统,该系统采用可感知退化的模块化传感器融合管道,仅在检测到退化时才在更新过程中同时测量来自另一个里程计的LiDAR点和相对位姿。
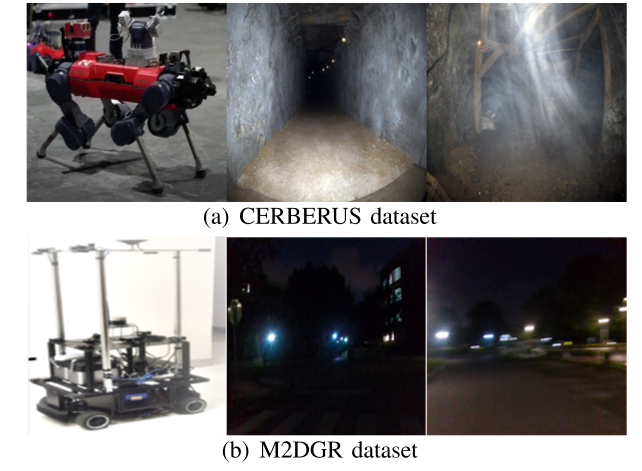
通过CRLB理论和仿真实验验证了该方法与单一观测值方法相比具有更高的精度。此外,针对各种最先进的传感器融合方法,在感知挑战数据集上对所提出的系统进行了评估。结果表明,即使在恶劣的环境和较差的观测条件下,该系统仍具有较高的估计精度和实时性能。
本文贡献如下:
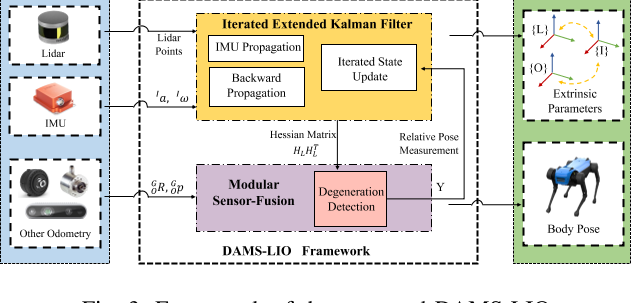
1、提出了一种基于退化感知和模块化传感器融合的轻量级激光雷达-惯性测程系统(DAMS-LIO),该系统能够在极端环境下进行鲁棒和准确的状态估计,在计算资源有限的情况下,为机器人执行复杂探测任务提供了明显的优势。
2、提出了一种新的传感器融合方法,将激光雷达和其他里程计的信息完全融合,仅在检测到退化时,将激光雷达点和其他里程计的相对位姿作为更新过程中的测量值。
3、基于CRLB定理进行了理论分析,以量化性能,并证明了所提出的传感器融合方法的高精度。
4、在模拟和真实数据集上的大量实验验证了我们方法的鲁棒性和准确性。

以上内容来自小六的机器人SLAM学习圈 每日更新内容

 浙公网安备 33010602011771号
浙公网安备 33010602011771号