
苏黎世联邦理工提出首个RGB实现神经隐式的稠密的SLAM,效果媲美RGB-D
2023-02-22 10:23 计算机视觉life 阅读(101) 评论(0) 编辑 收藏 举报以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# NICER-SLAM: Neural Implicit Scene Encoding for RGB SLAM
论文地址:https://arxiv.org/abs/2302.03594
作者单位:苏黎世联邦理工学院
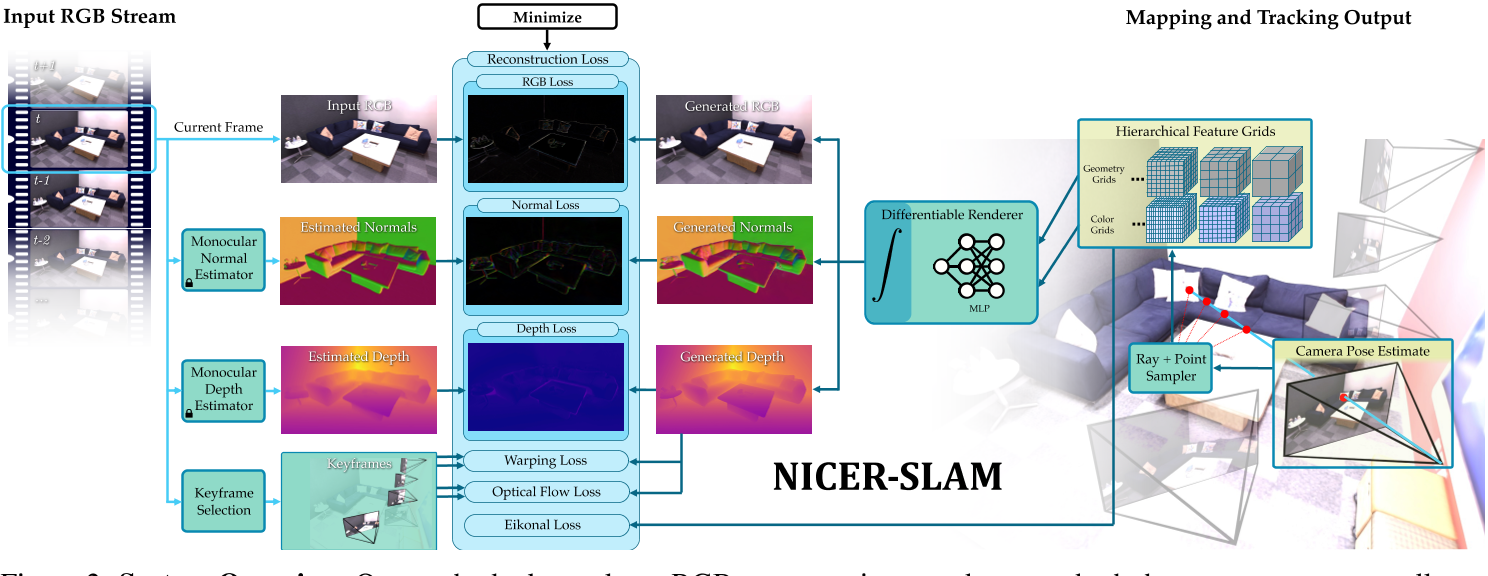
神经隐式表示近年来在SLAM中,特别是在稠密视觉SLAM中,成为一种流行的表示方法。然而,此前在这一方向上的工作要么依赖于RGB-D传感器,要么需要单独的单目SLAM方法进行相机跟踪,并且不能产生高精度、高密度3D场景重建。在本文中,我们提出了NICER-SLAM,这是一个稠密的RGB SLAM系统,同时优化相机位姿和分层神经隐式地图表示,这也允许高质量的新视图合成。
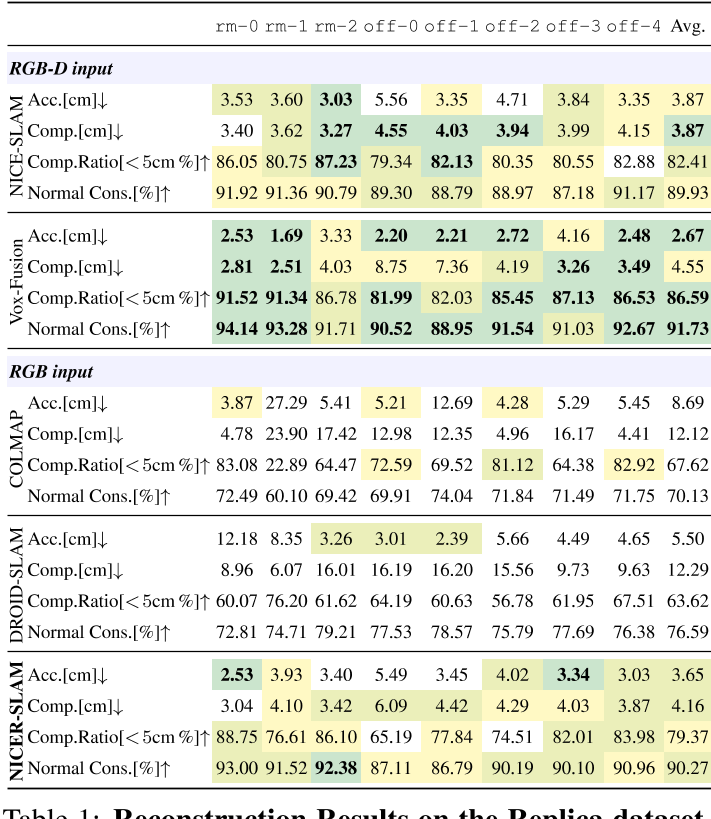
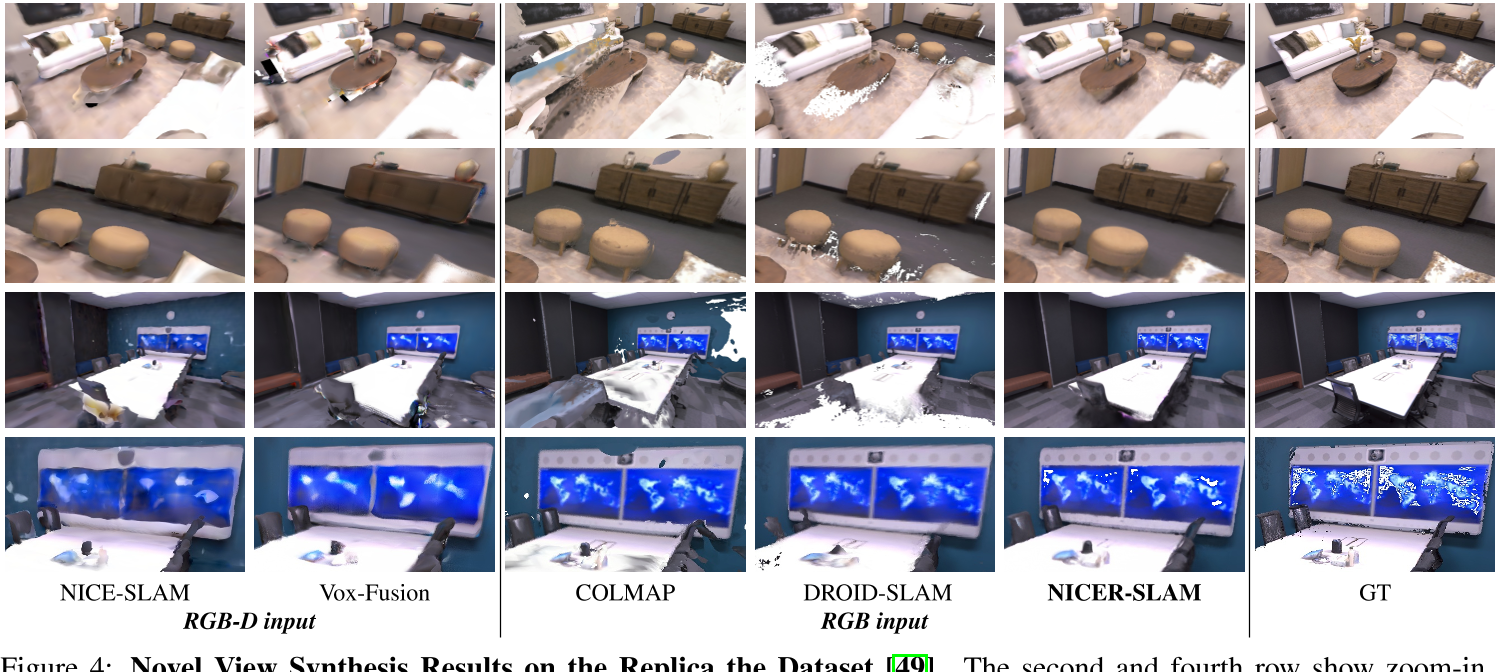
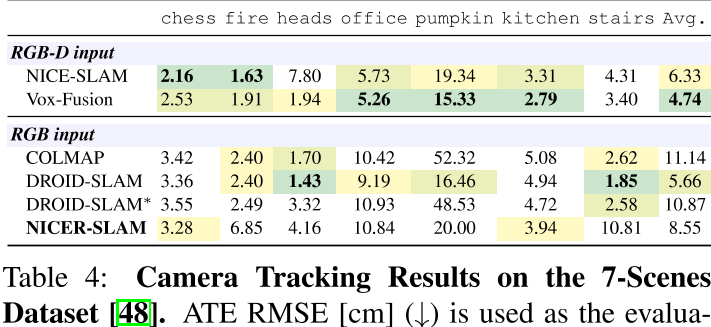
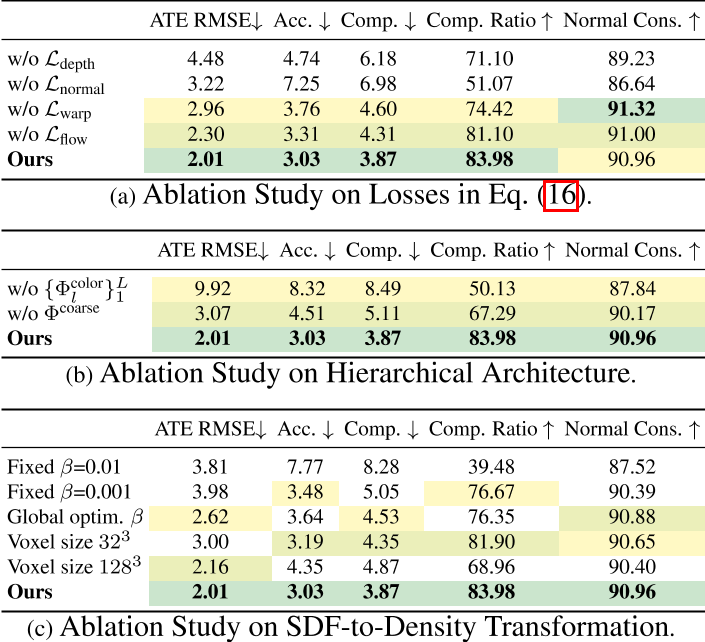
为了促进建图的优化过程,我们集成了额外的监督,包括易于获得的单目几何特征和光流,并引入了简单的翘曲损失来进一步加强几何一致性。此外,为了进一步提高复杂室内场景的性能,我们还提出了从符号距离函数(SDFs)到体绘制方程中的密度的局部自适应转换。在合成和真实数据集上,我们在密集映射、跟踪和新颖的视图合成方面都表现出了强大的性能,甚至可以与最近的RGB-D SLAM系统竞争。
本文贡献如下:
1、我们提出了NICER-SLAM,这是第一个稠密的RGB SLAM之一,它可以对跟踪和建图进行端到端优化,还可以实现高质量的新视图合成。
2、我们为SDF,不同的几何和运动正则化,以及局部自适应的SDF体积密度转换引入了层次神经隐式编码。
3、我们在合成数据集和真实数据集上展示了强大的建图、跟踪和新颖的视图合成性能,甚至可以与最近的RGBD SLAM方法竞争。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 周边上新:园子的第一款马克杯温暖上架
· 分享 3 个 .NET 开源的文件压缩处理库,助力快速实现文件压缩解压功能!
· Ollama——大语言模型本地部署的极速利器
· DeepSeek如何颠覆传统软件测试?测试工程师会被淘汰吗?
· 使用C#创建一个MCP客户端