
德国KIT提出用于自动驾驶汽车的新型激光雷达双目相机外参自标定方法,无需标定物!
2023-02-13 15:59 计算机视觉life 阅读(132) 评论(0) 编辑 收藏 举报以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# TEScalib: Targetless Extrinsic Self-Calibration of LiDAR and Stereo Camera for Automated Driving Vehicles with Uncertainty Analysis
论文地址:https://arxiv.org/abs/2202.13847
作者单位:卡尔斯鲁厄理工学院
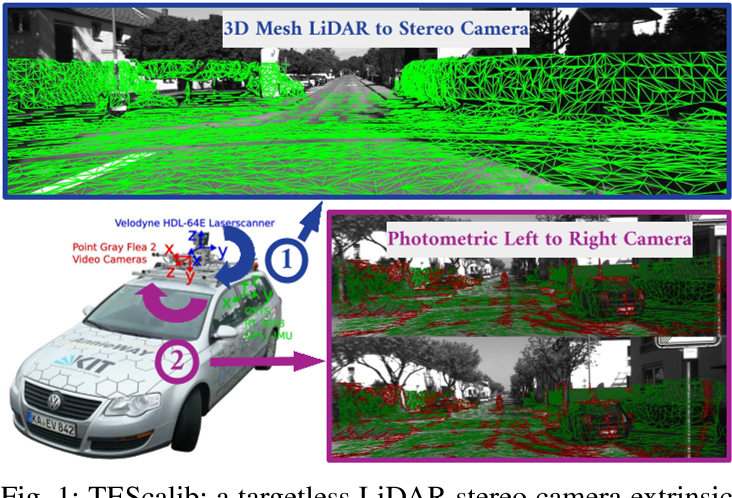
在本文中,我们提出了一种新型的激光雷达和双目相机外部自标定方法TEScalib,该方法利用周围环境的几何和光度信息,无需任何校准目标,用于自动驾驶车辆。由于激光雷达和双目摄像机被广泛应用于自动驾驶车辆的传感器数据融合,因此它们的外部标定非常重要。然而,大多数激光雷达和立体摄像机标定方法主要是基于目标的,因此耗时。即使是最近几年新开发的无目标方法也不准确或不适合驾驶平台。
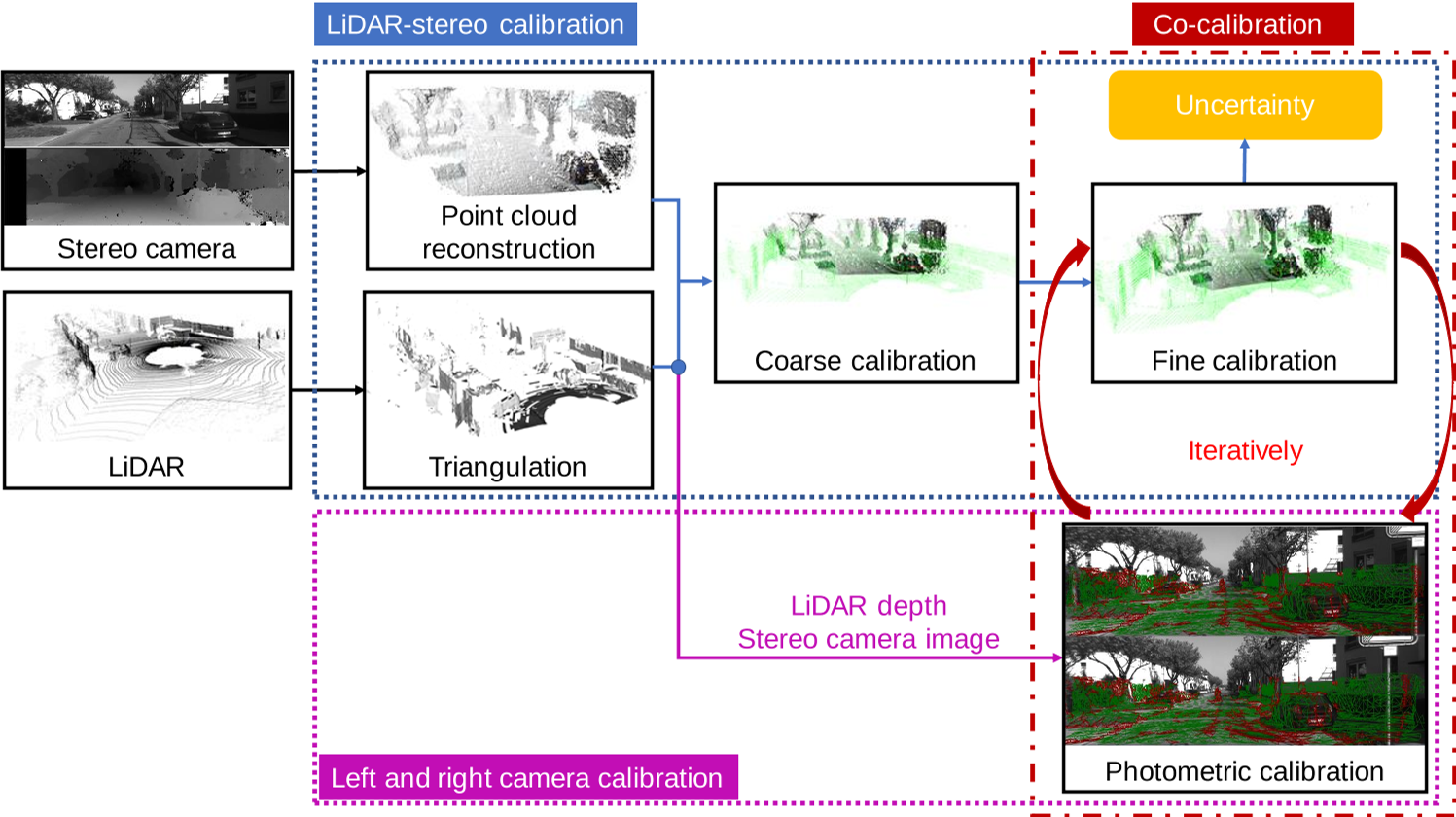
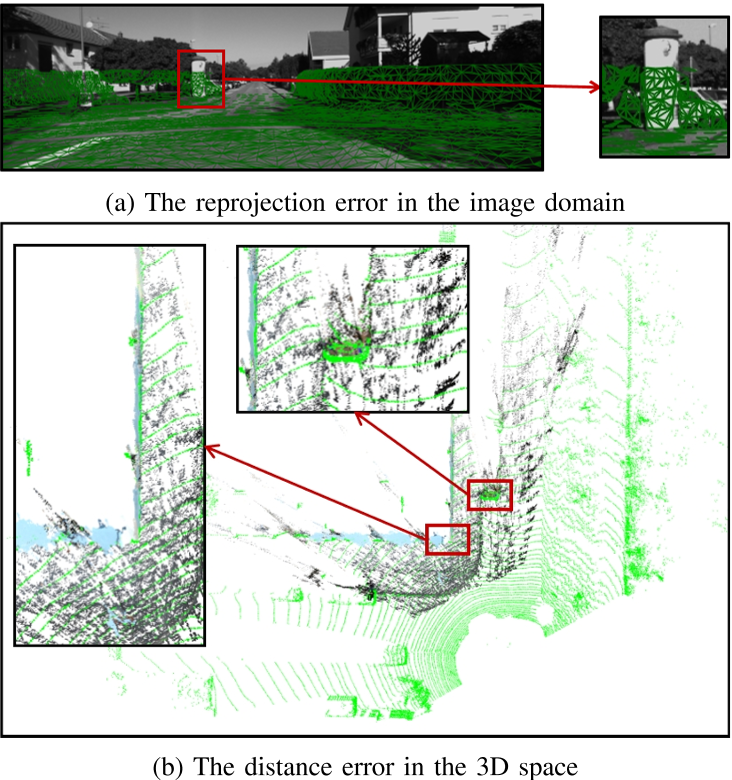
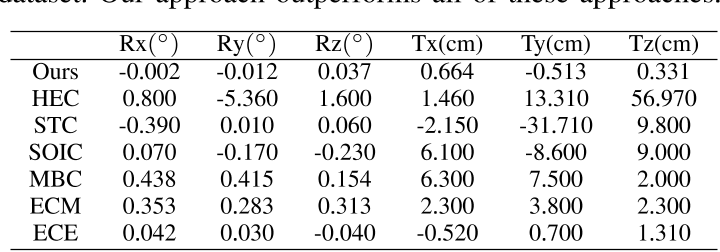
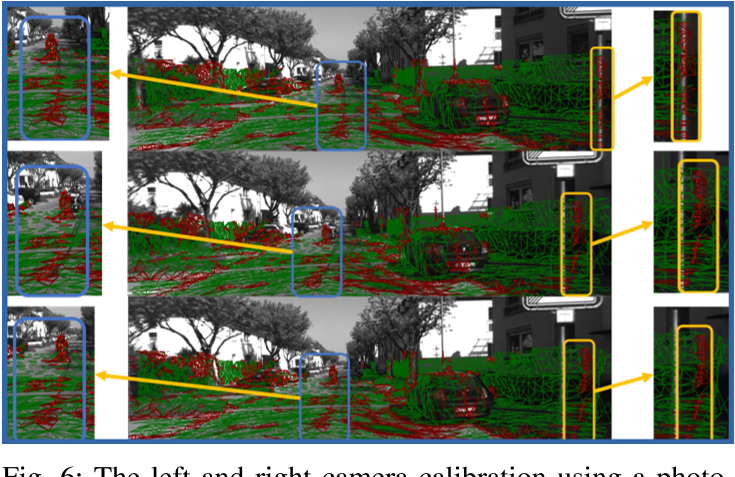
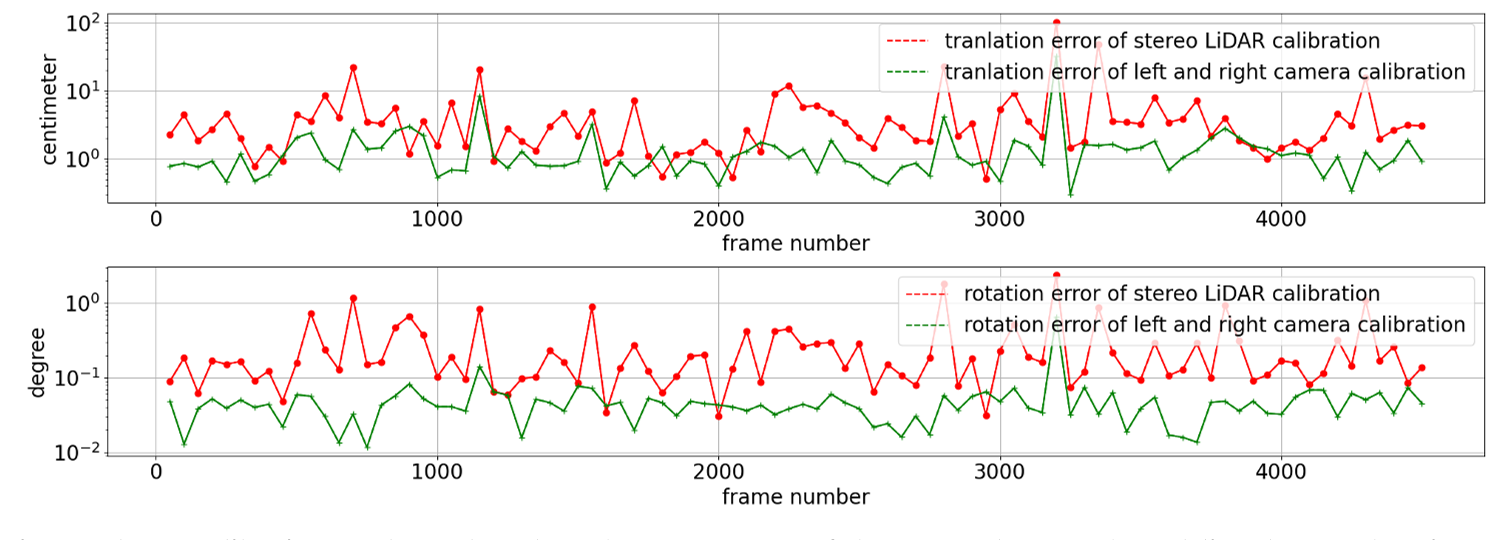
为了解决这些问题,我们引入了TEScalib。采用基于三维网格重建的点云配准方法,利用几何信息准确、鲁棒地估计了激光雷达对立体摄像机的外部参数。为了标定立体相机,建立了测光误差函数,并利用激光雷达深度将关键点从一个相机转换到另一个相机。在行驶过程中,这两个部分被迭代处理。此外,我们还提出了一种不确定性分析,以反映估计的外部参数的可靠性。我们在KITTI数据集上评估的TEScalib方法取得了非常好的结果。
本文贡献如下:
1、采用3D网格重建的激光雷达立体校准实现了大收敛范围和高精度。
2、带有光度误差函数的左右相机校准对相机姿态敏感,但对来自LiDAR 3D网格的关键点深度不敏感,这使得从糟糕的LiDAR深度初始化开始的在线迭代联合校准具有意义。
3、不确定性分析有助于评估在不同驾驶场景下每个单一维度估计的外部参数的可靠性。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律