
苏黎世联邦理工开源!首个多级LiDAR-相机融合的远程高清地图生成算法
2023-02-10 13:57 计算机视觉life 阅读(225) 评论(0) 编辑 收藏 举报 苏黎世联邦理工开源!首个多级LiDAR-相机融合的远程高清地图生成算法
苏黎世联邦理工开源!首个多级LiDAR-相机融合的远程高清地图生成算法
以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
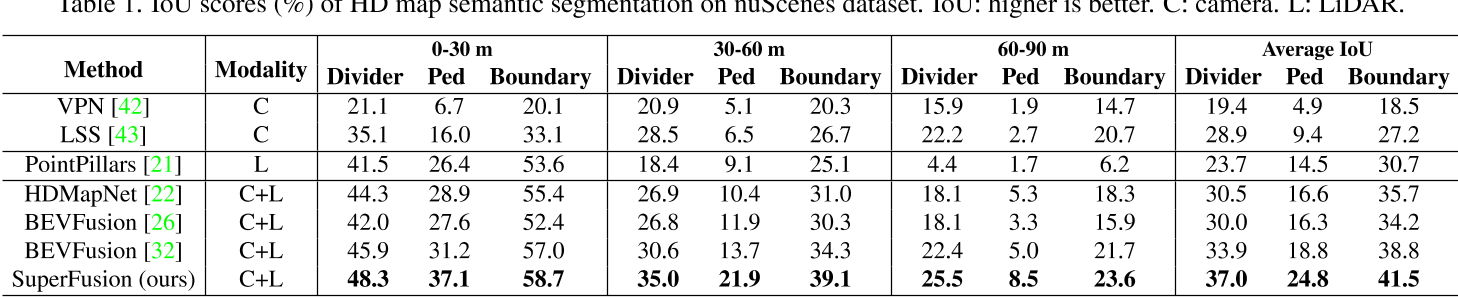
论文# SuperFusion: Multilevel LiDAR-Camera Fusion for Long-Range HD Map Generation and Prediction
论文地址:https://arxiv.org/abs/2211.15656
作者单位:苏黎世联邦理工学院
开源代码:GitHub - haomo-ai/SuperFusion: SuperFusion: Multil...
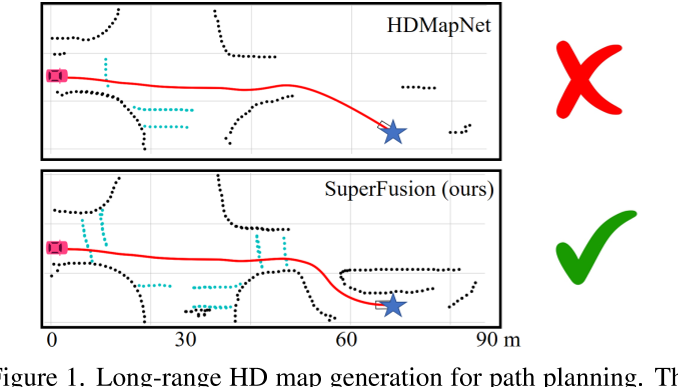
环境的高清(HD)语义图生成是自动驾驶的重要组成部分。现有的方法通过融合不同的传感器模式,如激光雷达和相机,在这项任务中取得了良好的性能。然而,目前的工作是基于原始数据或网络特征级融合,只考虑短程高清地图生成,限制了它们部署到现实的自动驾驶应用中。在本文中,我们专注于在短范围内构建高清地图的任务,即在 30 m 以内,并且还预测高达 90 m 的远程高清地图,这是下游路径规划和控制任务所需的,以提高自动驾驶的平滑度和安全性。
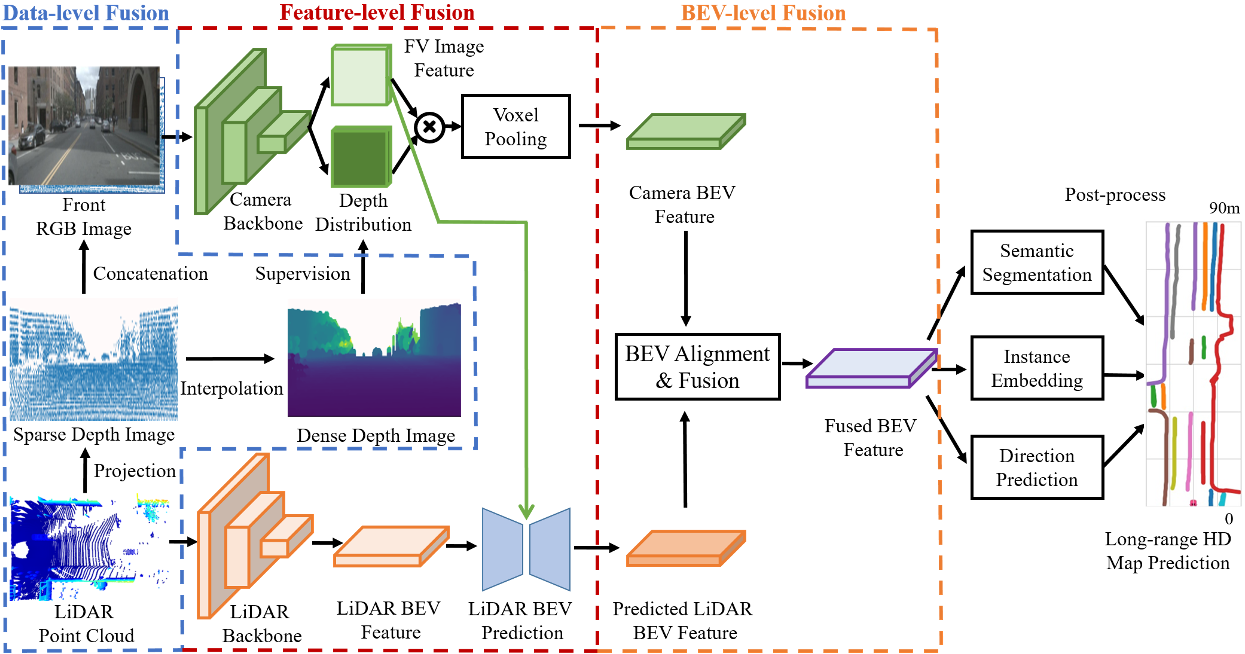
为此,我们提出了一种名为 SuperFusion 的新型网络,利用 LiDAR 和相机数据在多个层次上的融合。我们在 nuScenes 数据集和自记录的数据集上对我们的 SuperFusion 进行了基准测试,并表明它大大优于最先进的基线方法。此外,我们提出了一种新的度量来评估远程高清地图预测,并将生成的高清地图应用到下游路径规划任务中。结果表明,通过使用我们的方法预测的远程高清地图,我们可以为自动驾驶汽车提供更好的路径规划。
本文的贡献可以概括为:
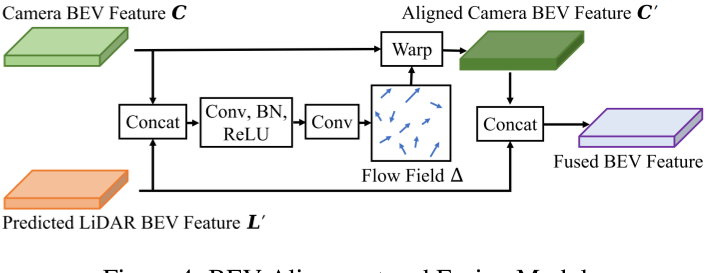
i)我们提出的新型多级 LiDAR 相机融合网络充分利用了两种模态的信息并生成高质量的融合 BEV 特征来支持不同的任务;
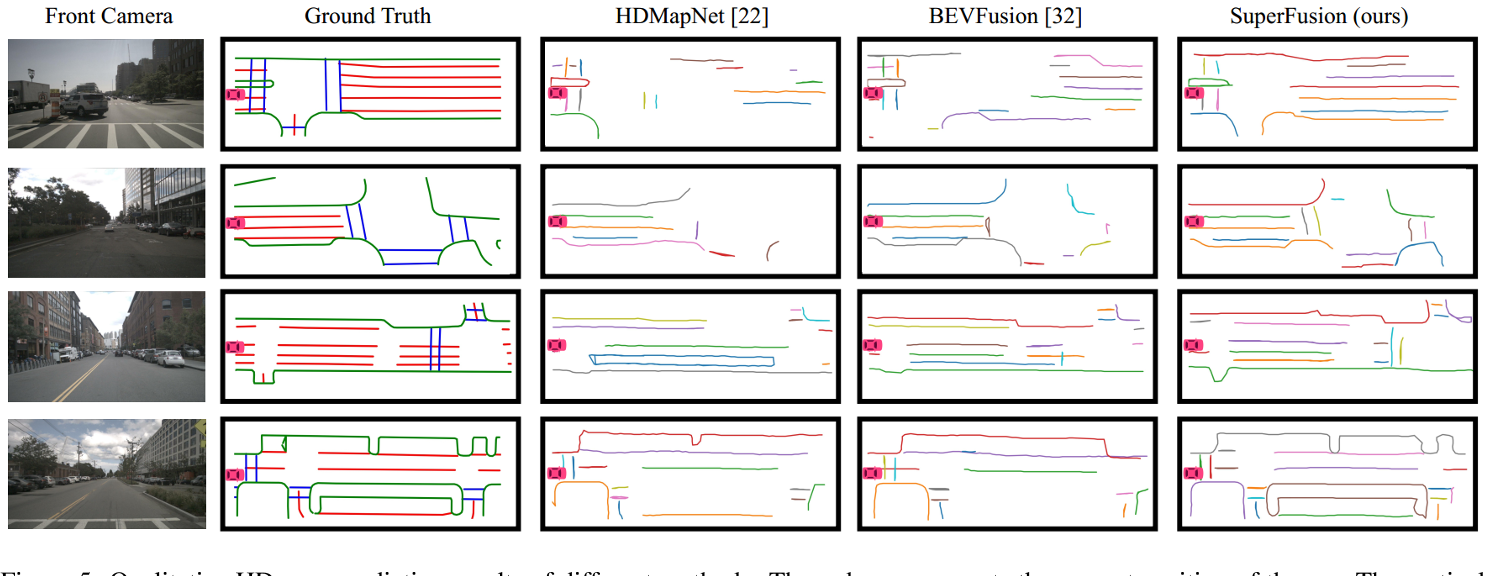
ii) 我们的 SuperFusion 在短程和远程高清地图生成方面都大大超过了最先进的融合方法;
iii) 据我们所知,我们的工作是第一个实现远程高清地图生成的工作,即高达 90 m,有利于自动驾驶下游规划任务。

以上内容来自小六的机器人SLAM学习圈 每日更新内容


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 周边上新:园子的第一款马克杯温暖上架
· 分享 3 个 .NET 开源的文件压缩处理库,助力快速实现文件压缩解压功能!
· Ollama——大语言模型本地部署的极速利器
· DeepSeek如何颠覆传统软件测试?测试工程师会被淘汰吗?
· 使用C#创建一个MCP客户端