
芬兰研究院开源,专用于远程高空无人机视觉定位,无需GNSS!
2023-02-09 10:54 计算机视觉life 阅读(1045) 评论(0) 收藏 举报 芬兰研究院开源,专用于远程高空无人机视觉定位,无需GNSS!
芬兰研究院开源,专用于远程高空无人机视觉定位,无需GNSS!
以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# Vision-based GNSS-Free Localization for UAVs in the Wild
论文地址:https://arxiv.org/abs/2210.09727
作者单位:芬兰研究院
开源代码:https://github.com/TIERS/wildnav
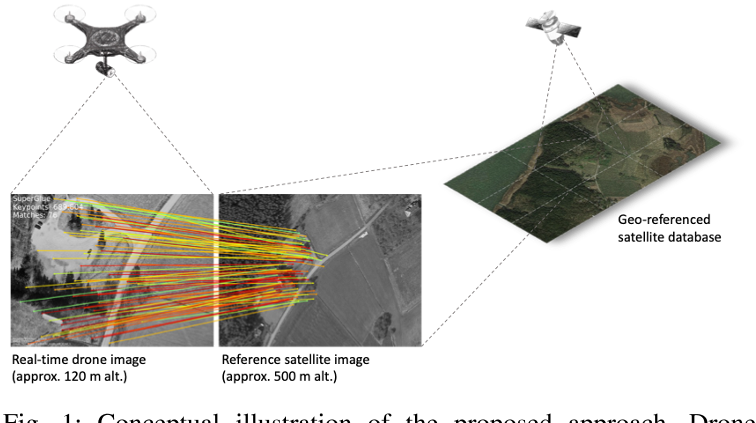
考虑到工业和研究场景中无人机应用的加速发展,使用GNSSFree、基于视觉的方法在非城市环境中本地化这些空中系统的需求越来越大。本文提出了一种基于视觉的定位算法,利用深度特征计算无人机在野外飞行的地理坐标。该方法基于无人机相机捕获的RGB照片的显著特征与预先构建的地图的部分相匹配,该地图由地理参考的开源卫星图像组成。
实验结果表明,基于视觉的定位方法与传统的基于gnss的定位方法具有相当的精度,并作为地面真值。与最先进的视觉里程计(VO)方法相比,我们的解决方案是为远程、高空无人机飞行设计的。


以上内容来自小六的机器人SLAM学习圈 每日更新内容

 浙公网安备 33010602011771号
浙公网安备 33010602011771号