同济大学提出DL-SLOT,自动驾驶场景同时求解SLAM和动态物体跟踪
2023-02-08 10:00 计算机视觉life 阅读(146) 评论(0) 收藏 举报 同济大学提出DL-SLOT,自动驾驶场景同时求解SLAM和动态物体跟踪!
同济大学提出DL-SLOT,自动驾驶场景同时求解SLAM和动态物体跟踪!
以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# DL-SLOT: Dynamic LiDAR SLAM and object tracking based on collaborative graph optimization
论文地址:https://arxiv.org/abs/2212.02077
作者单位:同济大学
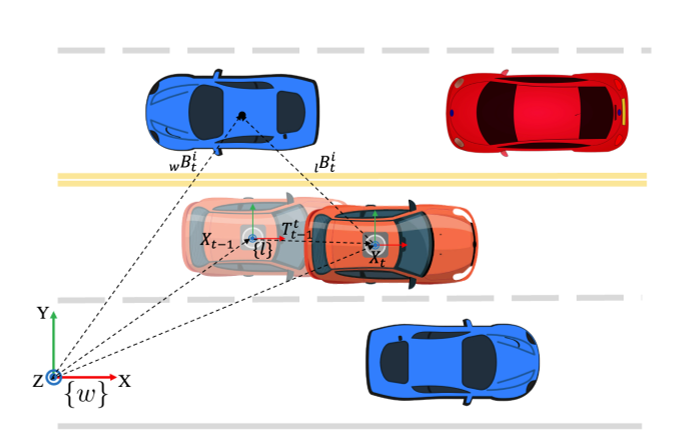
位姿估计和动态目标跟踪是自动驾驶系统的两个关键问题。这些问题的解决通常基于各自的假设,即同步定位与建图(SLAM)的静态世界假设和目标跟踪的精确姿态的假设。然而,这些假设在动态道路场景中是具有挑战性的,在动态道路场景中SLAM和目标跟踪变得密切相关。因此,我们提出了一种动态激光雷达SLAM和目标跟踪方法DL-SLOT,以同时解决这两个耦合问题。该方法将自动驾驶汽车和环境中静止和动态物体的状态估计集成到一个统一的优化框架中。
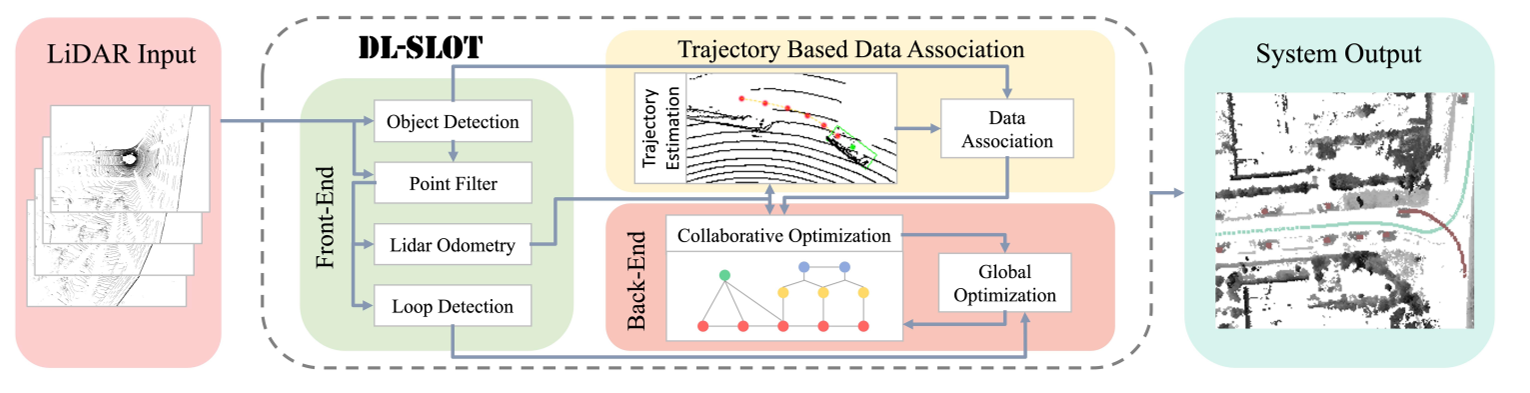
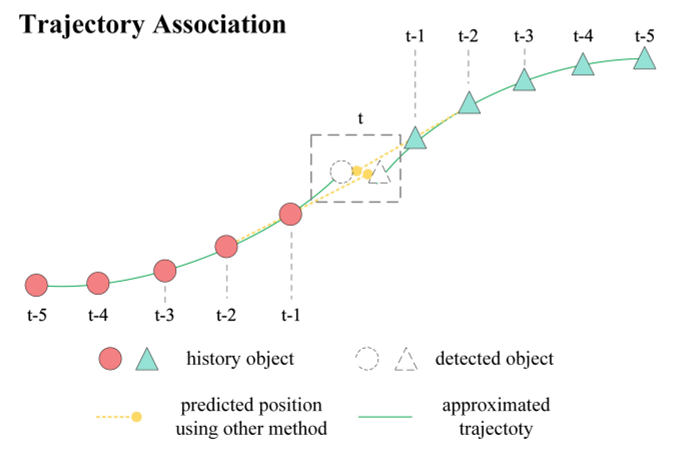
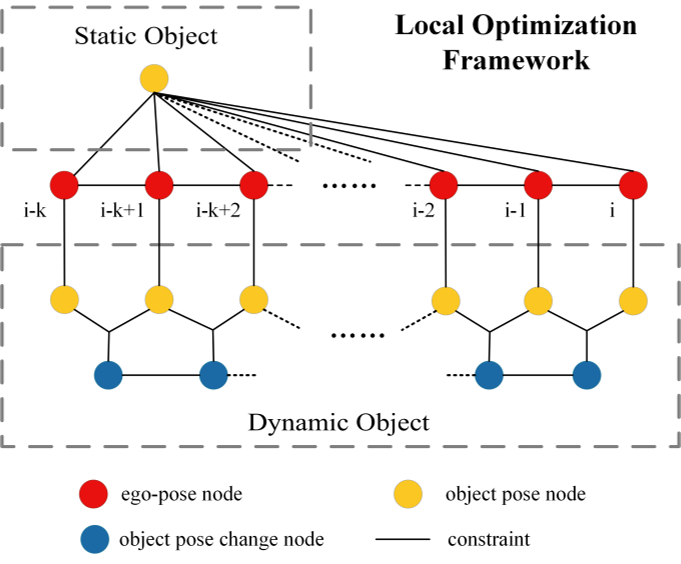
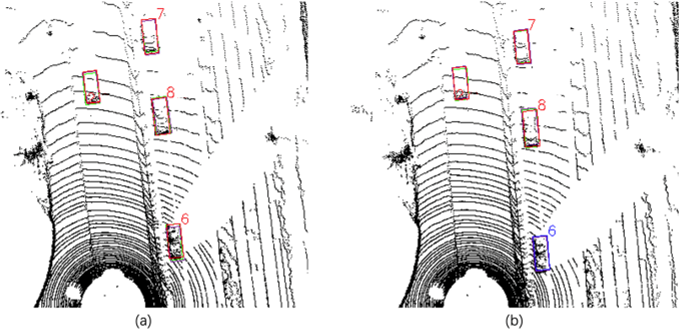
首先,我们使用对象检测来识别所有属于潜在动态对象的点。随后,利用过滤后的点云进行激光雷达里程计。同时,我们提出了一种基于滑动窗口的对象关联方法,该方法根据被跟踪对象的历史轨迹准确地关联对象。在基于滑动窗口的协同图优化中,集成了静态和动态对象的状态。随后从潜在动态对象集中恢复静止对象。最后,实现了全局姿态图,消除了累积误差。
在KITTI数据集上的实验表明,该方法比SLAM和目标跟踪基线方法具有更好的精度。这证实了同时求解SLAM和目标跟踪是相互有利的,极大地提高了SLAM和目标跟踪在动态道路场景中的鲁棒性和准确性。
本文贡献如下:
1、本文提出了一个统一的优化框架,同时估计车辆状态和潜在动态物体。
2、一种利用固定时间间隔滑动窗口内轨迹信息的鲁棒高效数据关联方法。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号