
东京大学提出矢量地图和体素网格地图进行视觉定位
2023-02-02 11:17 计算机视觉life 阅读(97) 评论(0) 编辑 收藏 举报以下内容来自从零开始机器人SLAM知识星球 每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# VMVG-Loc: Visual Localization for Autonomous Driving using Vector Map and Voxel Grid Map
论文地址:IROS2022论文集
作者单位:日本东京大学
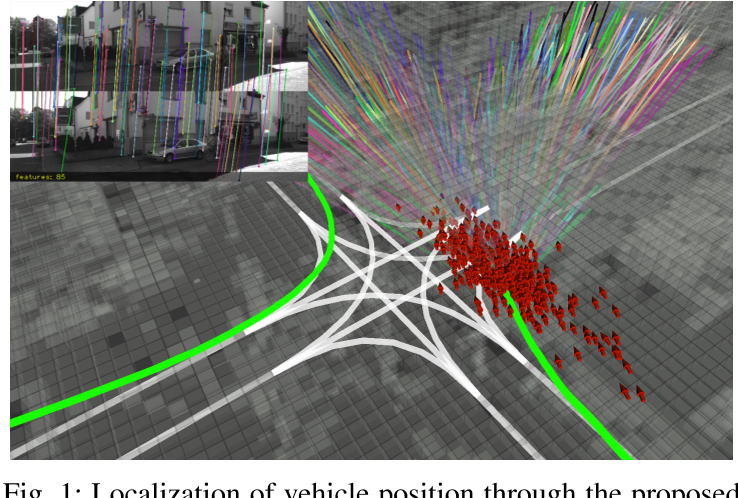
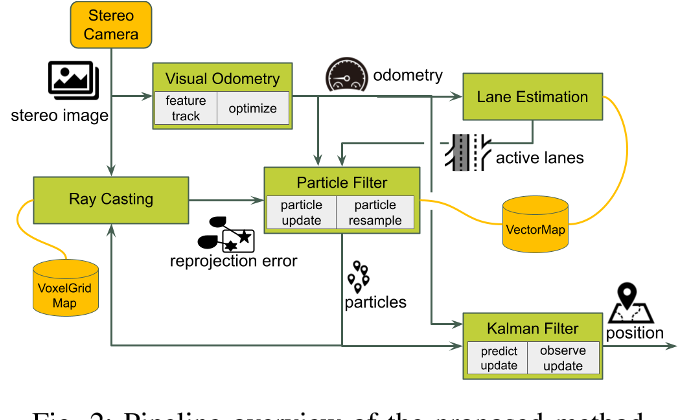
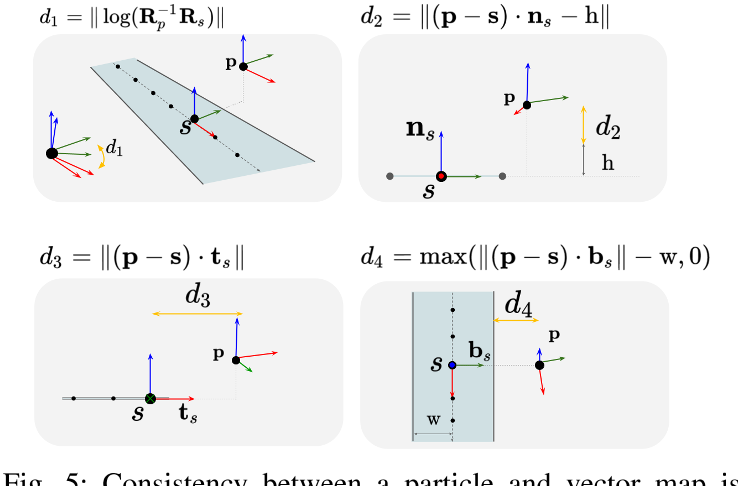
本文提出了一种利用双目相机的矢量地图和体素网格地图进行视觉定位的方法。这两个地图提供了不同的模态优势,并使用粒子滤波器集成。与其他基于矢量地图的方法相比,我们的方法不使用道路标记,因为创建和维护包含高精度道路标记的矢量地图是费力的。此外,它还限制了它们可用的区域。
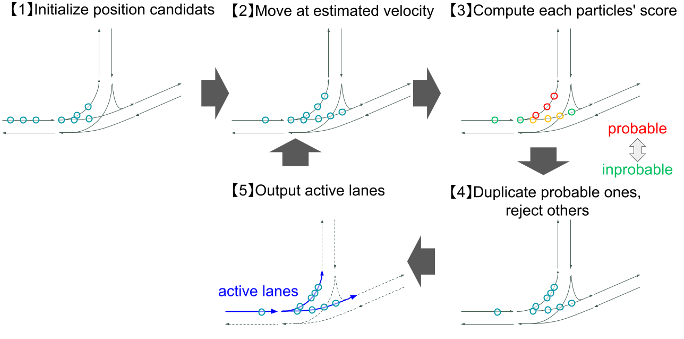
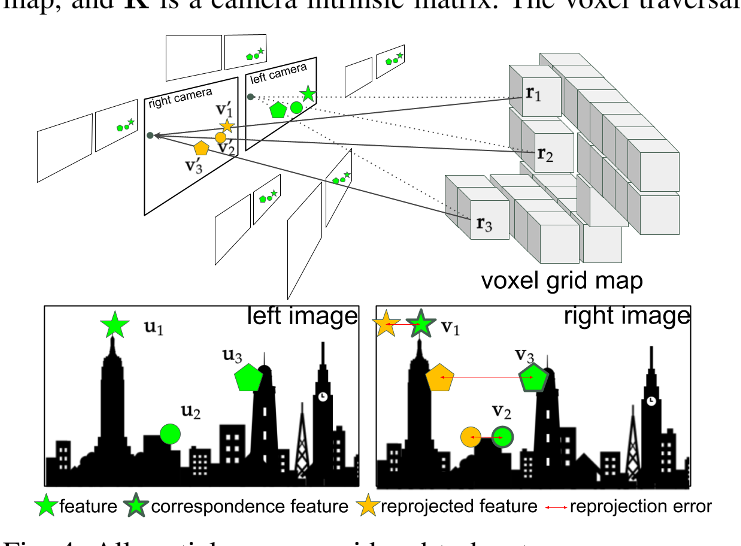
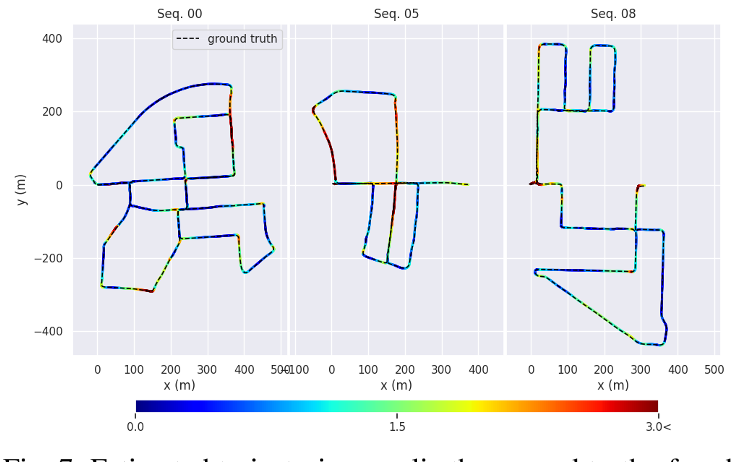
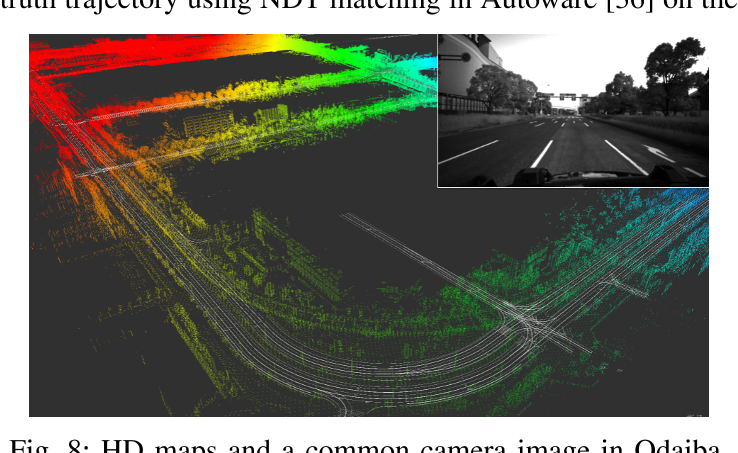
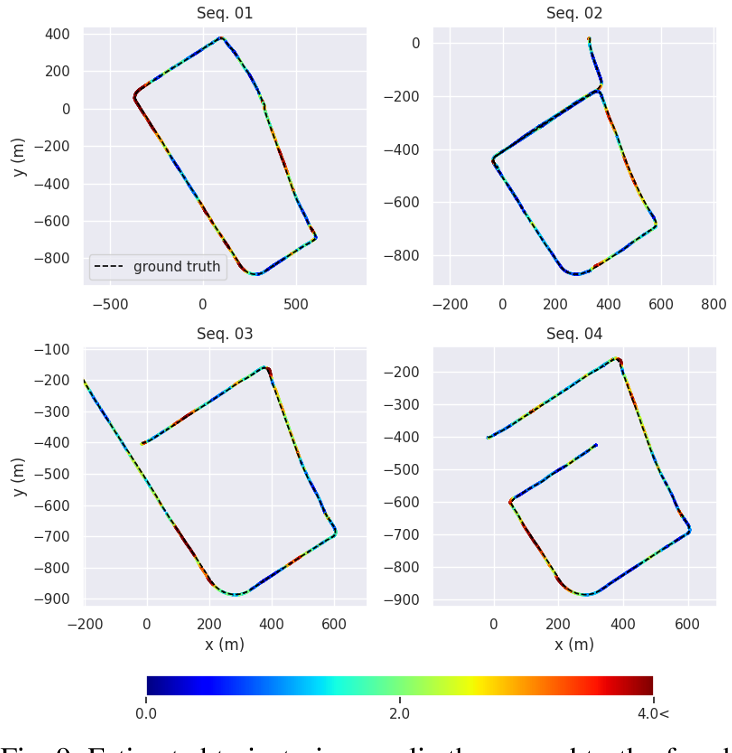
这种方法只使用矢量地图中的车道中心线,这比道路标记更容易创建。该方法通过射线投射和重投影误差计算来评估体素网格地图的车辆位置。虽然这使得方法对环境敏感,但车道的约束使估计稳定。实验证明,该方法能够稳定、准确地进行定位,即使在较长的距离上也不会出现故障。此外,一项消融研究显示了结合两种地图的好处。本文贡献如下:1、提出了在不使用路面标记的情况下,利用矢量和体素网格地图进行视觉定位。2、对不同场景下的定位精度和鲁棒性进行测试。3、消融研究两种类型的地图的影响。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 周边上新:园子的第一款马克杯温暖上架
· 分享 3 个 .NET 开源的文件压缩处理库,助力快速实现文件压缩解压功能!
· Ollama——大语言模型本地部署的极速利器
· DeepSeek如何颠覆传统软件测试?测试工程师会被淘汰吗?
· 使用C#创建一个MCP客户端