宾夕法尼亚大学开源DSO升级版,速度快5倍!
2023-01-18 09:42 计算机视觉life 阅读(270) 评论(0) 收藏 举报 宾夕法尼亚大学开源DSO升级版,速度快5倍!
宾夕法尼亚大学开源DSO升级版,速度快5倍!
以下内容来自从零开始机器人SLAM知识星球 每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文##开源代码# DSOL: A Fast Direct Sparse Odometry Scheme
论文地址:https://arxiv.org/pdf/2203.08182.pdf
作者单位:宾夕法尼亚大学
源代码:GitHub - versatran01/dsol: DSOL: Direct Sparse Odo...
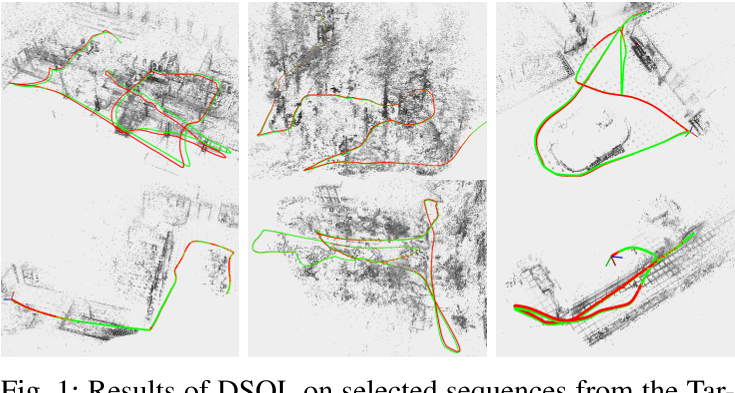
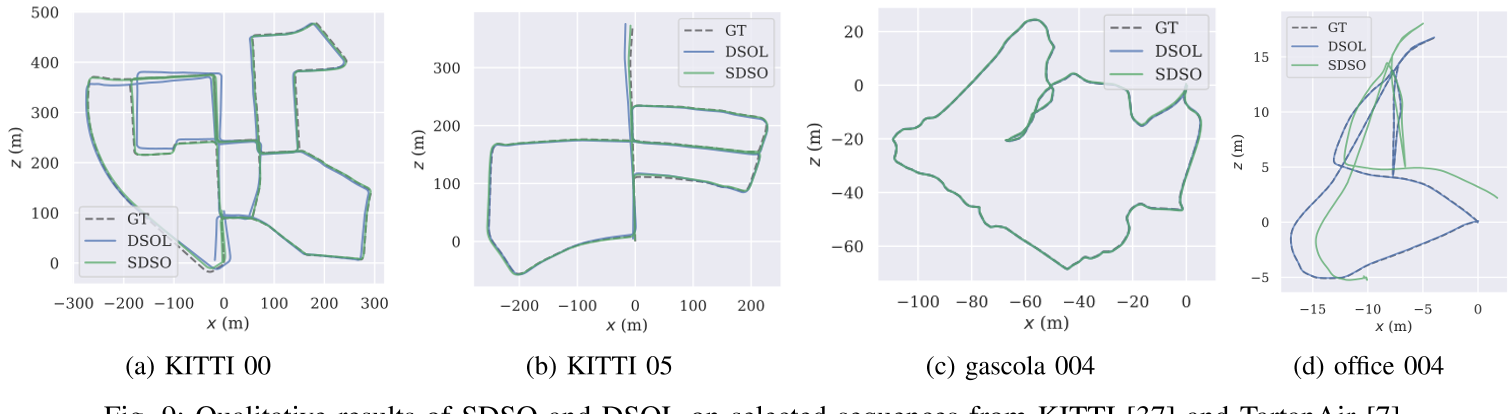
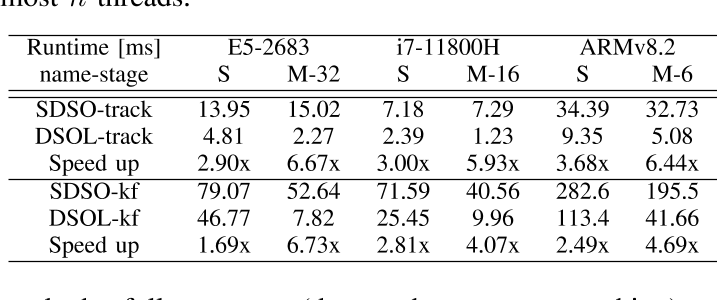
本文提出了直接稀疏里程计Lite(DSOL),它是直接稀疏里程计(DSO)的改进版本。我们提出了几个算法和实现增强,即使在资源受限的平台上也可以将计算速度提高一倍(平均为5倍)。速度的提高使我们能够以更高的帧速率处理图像,这反过来又可以在快速运动中提供更好的效果。
我们的改进如下:
(1)我们在帧跟踪中采用逆合成对齐方法,
(2)我们在整个窗口内跟踪新图像,而不是最后一个关键帧,
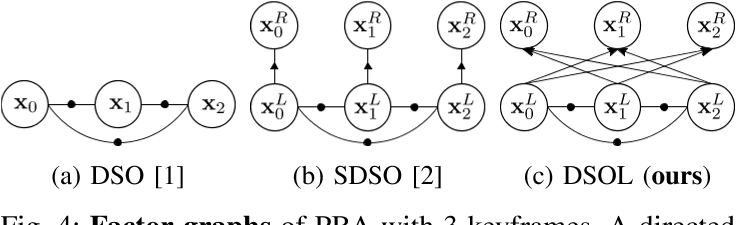
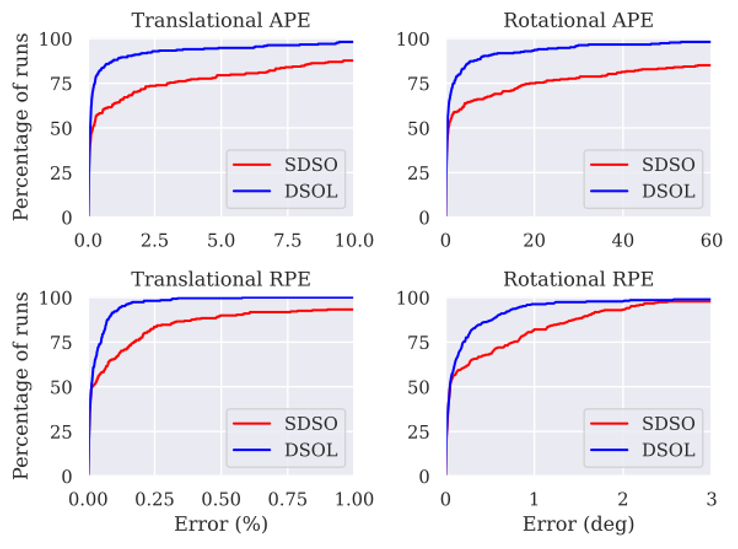
(3)我们提出了一个比SDSO更好的双目光度BA公式,
(4)我们极大地简化了DSO的关键帧创建和删除标准,
(5)我们的系统并行化以有效地利用所有可用的计算资源。
以上内容来自从零开始机器人SLAM知识星球 每日更新内容

 浙公网安备 33010602011771号
浙公网安备 33010602011771号