
上海交大最新工作:PPP+VIO紧耦合SLAM系统P3-VINS
2023-01-16 10:22 计算机视觉life 阅读(161) 评论(0) 编辑 收藏 举报 上海交大最新工作:PPP+VIO紧耦合SLAM系统P3-VINS
上海交大最新工作:PPP+VIO紧耦合SLAM系统P3-VINS
以下内容来自从零开始机器人SLAM知识星球 每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# P3-VINS: Tightly-Coupled PPP/INS/Visual SLAM Based on Optimization Approach
论文地址:IROS2022论文集
作者单位:上海交通大学
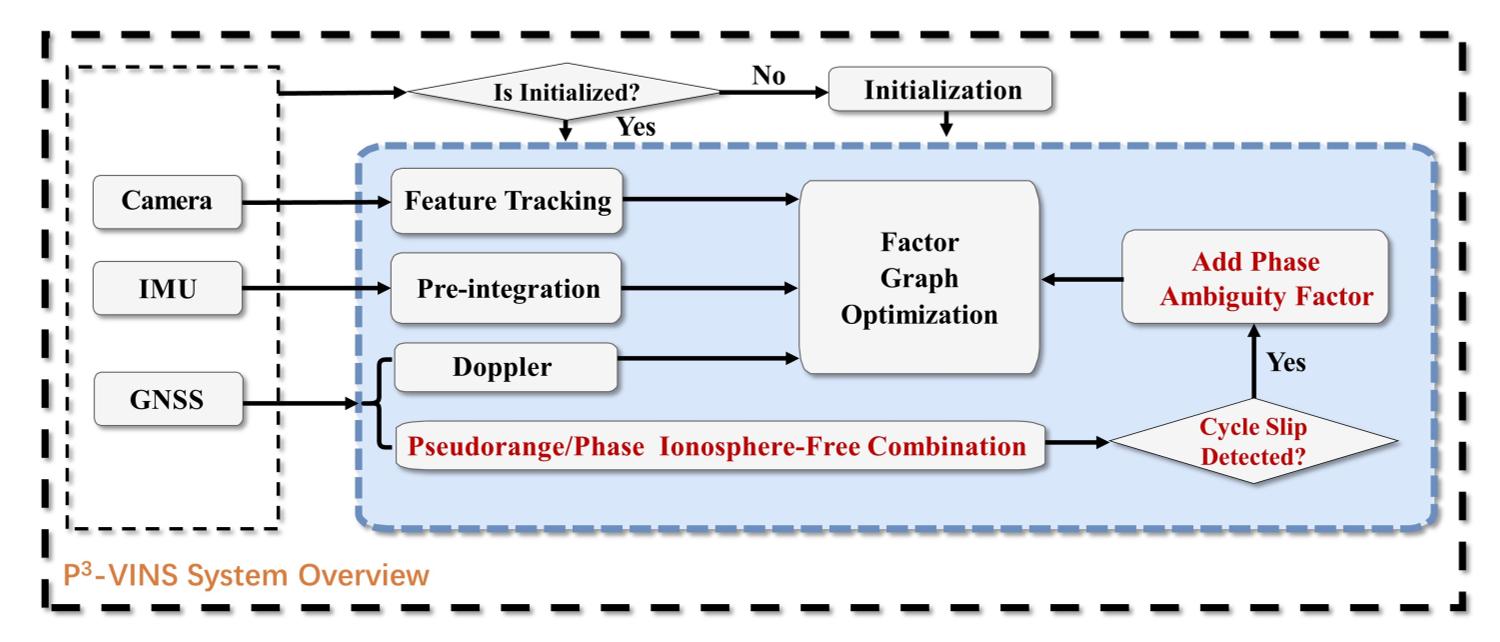
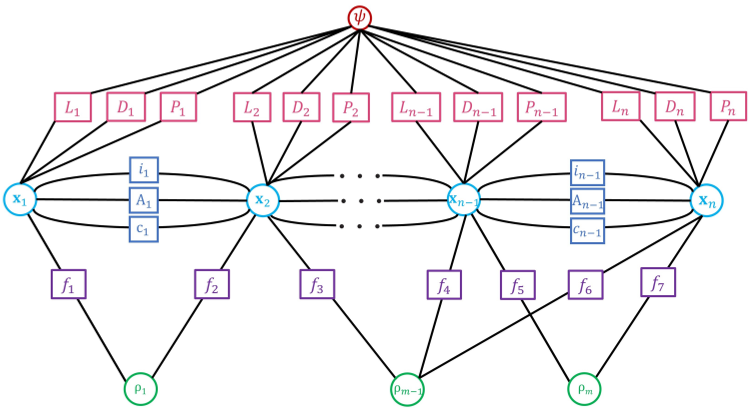
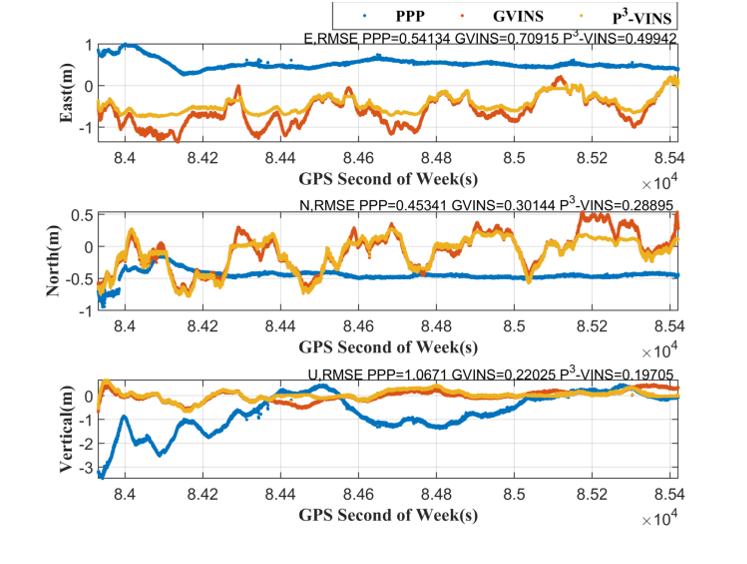
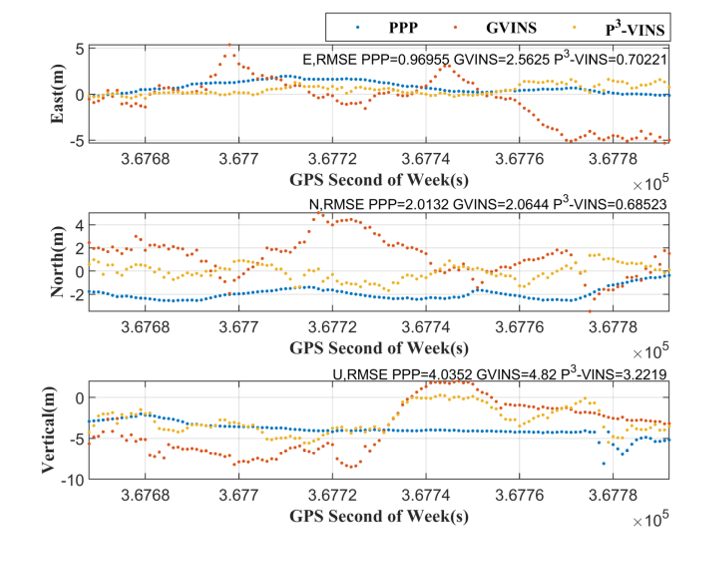
精密单点定位(PPP)是全球导航卫星系统(GNSS)的前沿技术,无需基站辅助即可实现高精度定位。视觉惯性里程计(VIO)实现了比视觉SLAM更鲁棒的局部位姿估计。在PPP和VIO的基础上,提出了一种紧耦合的PPP/INS/VisualSLAM系统P3-VINS。它融合了GNSS原始测量(伪距、载波相位和多普勒)与视觉和惯性信息,以进行准确和稳健的状态估计。所有原始数据都是在因子图框架下建模和优化的。为了消除电离层影响和利用载波相位测量,P3-VINS使用双频观测的无电离层(IF)模型,并在估计状态中加入相位模糊。最后,在公共数据集和真实世界实验上对P3-VINS进行了评估。它在准确性和流畅性方面明显优于基准(GVINS和PPP)。这一结果表明,高精度载波相位在很大程度上有助于GNSS/INS/视觉SLAM系统降低噪声,提高精度。
本文贡献如下:
1、我们提出了一种基于优化的紧耦合方法P3-VINS,在因子图框架下融合VIO和PPP。
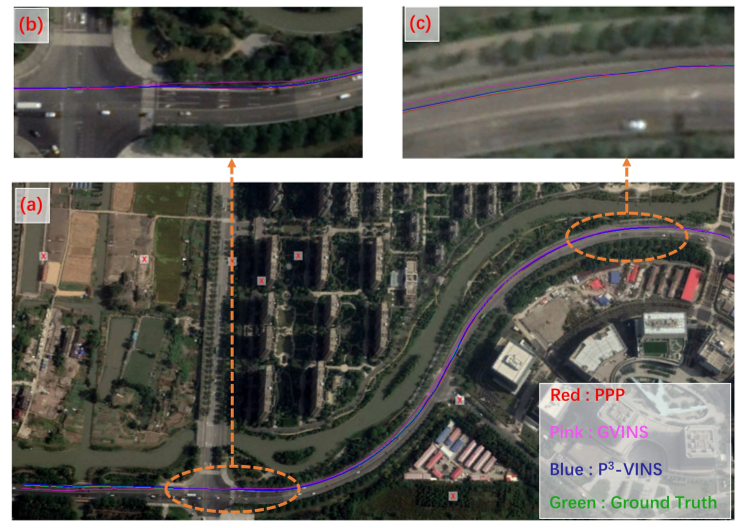
2、P3-VINS使用双频观测伪距和载波相位的无电离层(IF)模型,并在估计状态中加入相位模糊。然后搭建车载GNSS/IMU/相机系统对P3-VINS进行测试。
以上内容来自从零开始机器人SLAM知识星球 每日更新内容


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 周边上新:园子的第一款马克杯温暖上架
· 分享 3 个 .NET 开源的文件压缩处理库,助力快速实现文件压缩解压功能!
· Ollama——大语言模型本地部署的极速利器
· DeepSeek如何颠覆传统软件测试?测试工程师会被淘汰吗?
· 使用C#创建一个MCP客户端