
阿尔伯塔大学—一个新颖、通用且可扩展的框架,用于对 SLAM 数据集进行定量分析和比较
2023-01-12 09:54 计算机视觉life 阅读(27) 评论(0) 编辑 收藏 举报以下内容来自从零开始机器人SLAM知识星球 每日更新内容
论文# Are We Ready for Robust and Resilient SLAM? A Framework For Quantitative Characterization of SLAM Datasets
论文地址:https://arxiv.org/pdf/2202.11312.pdf
作者单位:阿尔伯塔大学
SLAM 系统的可靠性被认为是现代机器人系统的关键要求之一。这引导人们努力开发许多最先进的系统,创建具有挑战性的数据集,并引入严格的指标来衡量 SLAM 性能。然而,很少有人探索数据集与鲁棒性/弹性环境中的性能之间的联系。为了填补这一空白,SLAM 系统的运行条件的表征对于为鲁棒性和弹性的定量测量提供环境至关重要。在本文中,我们认为,为了正确评估 SLAM 性能,SLAM 数据集是关键的第一步。
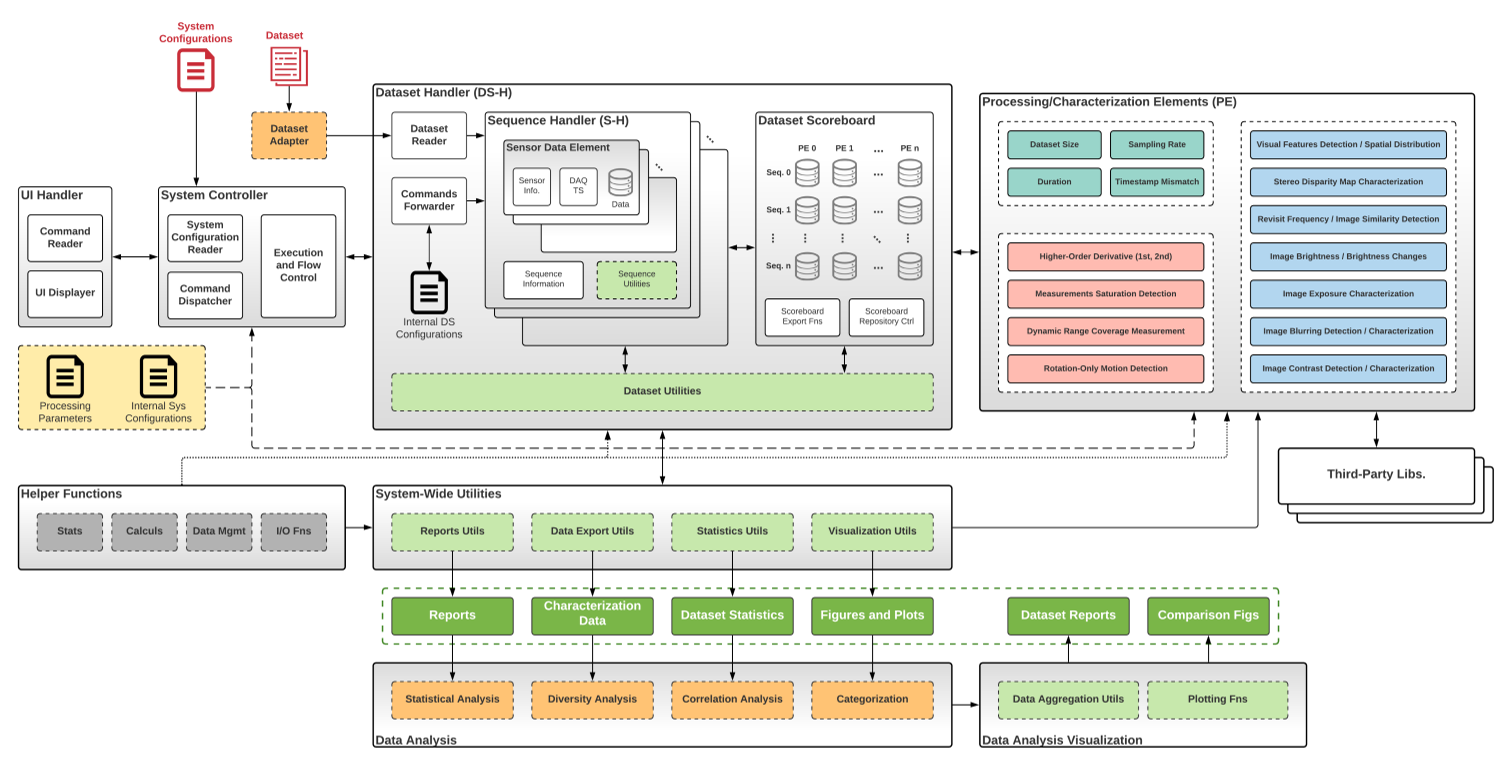
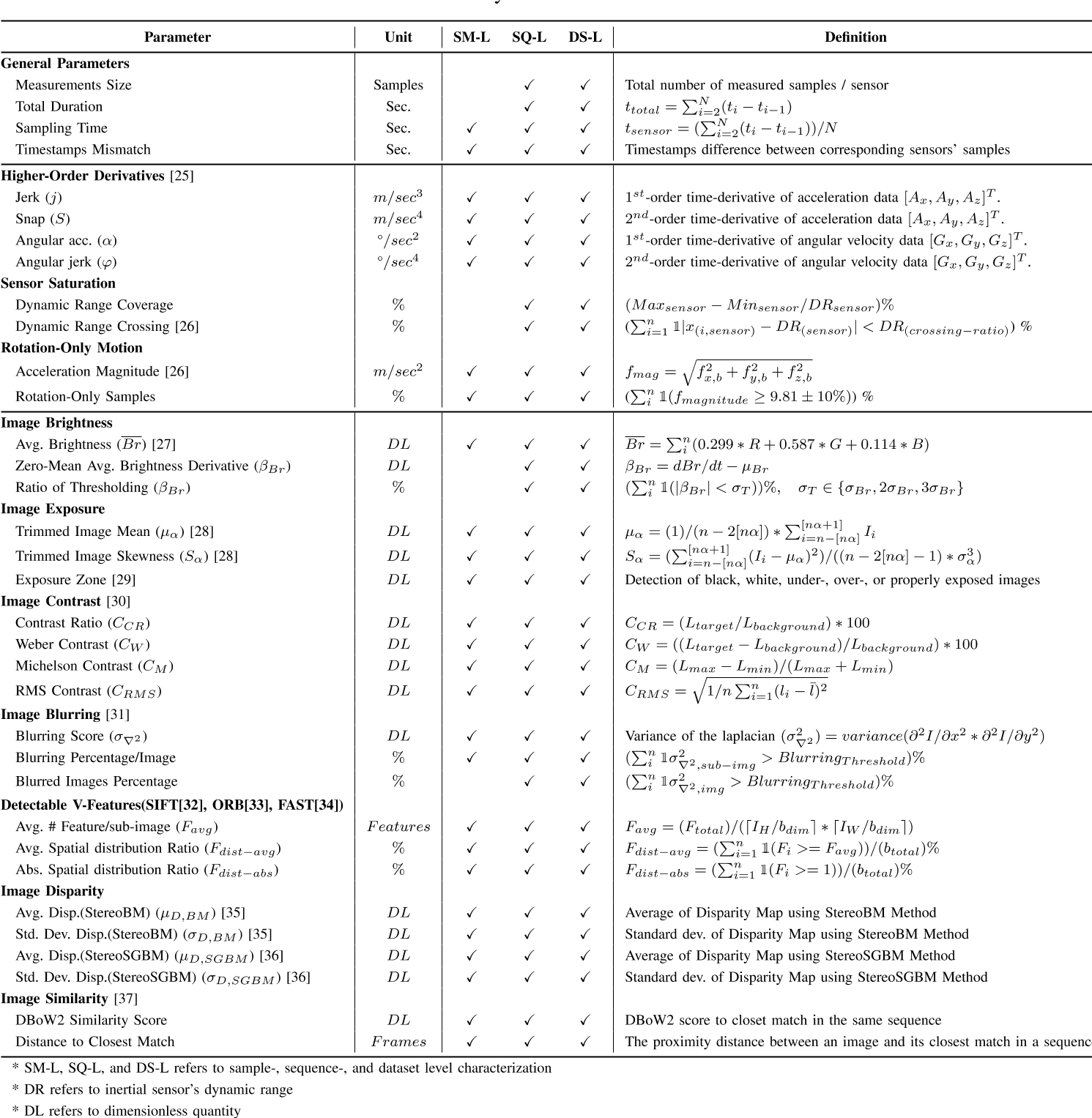
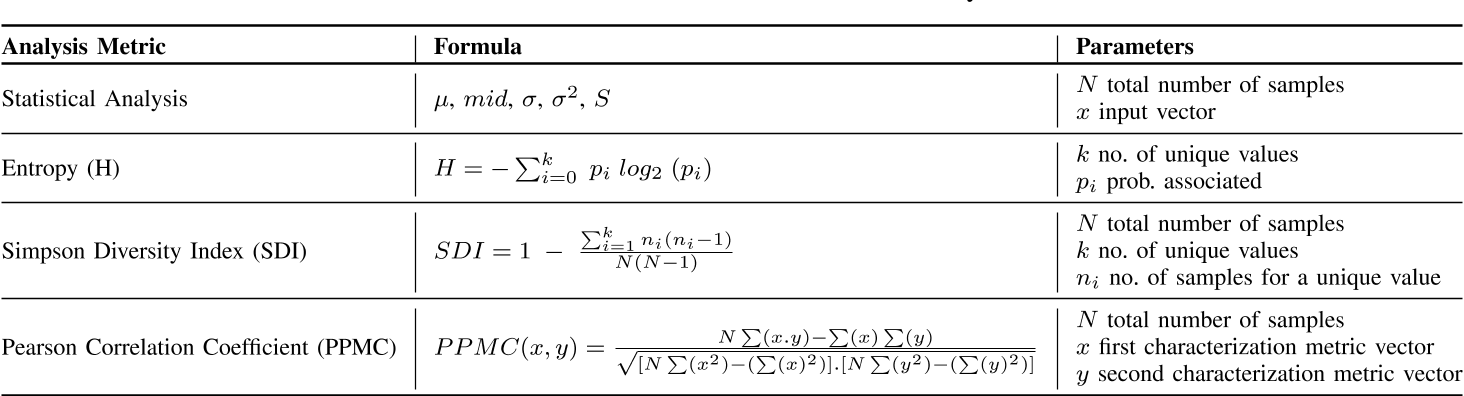
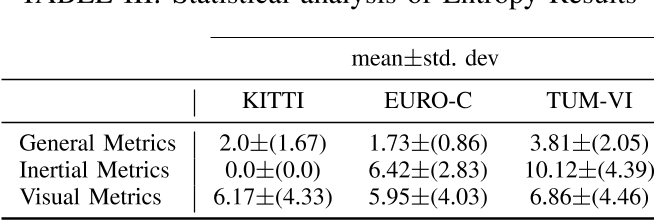
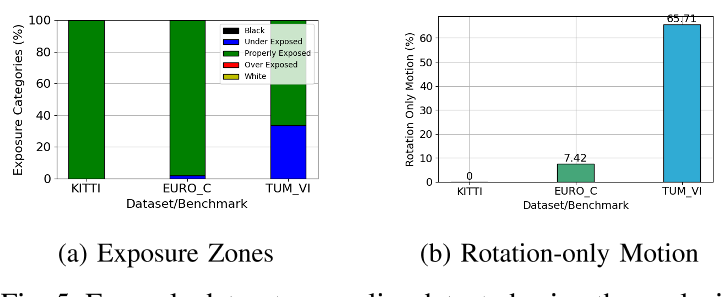
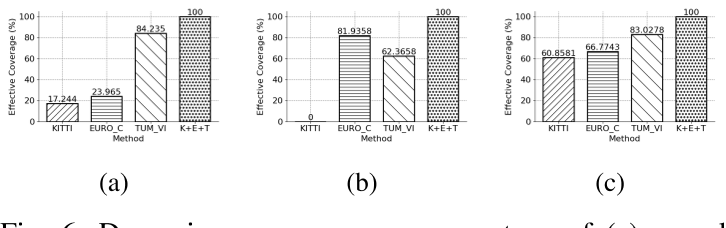
该研究首先回顾了以前对 SLAM 数据集进行定量表征的努力。然后,讨论了扰动表征问题,并建立了与 SLAM 鲁棒性/弹性的联系。之后,我们提出了一个新颖、通用且可扩展的框架,用于对 SLAM 数据集进行定量分析和比较。此外,还提供了不同表征参数的描述。最后,我们通过展示三个 SLAM 数据集的表征结果来展示我们框架的应用:KITTI、EuroC-MAV 和 TUM-V。
以上内容来自从零开始机器人SLAM知识星球 每日更新内容
本文由博客一文多发平台 OpenWrite 发布!


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 周边上新:园子的第一款马克杯温暖上架
· 分享 3 个 .NET 开源的文件压缩处理库,助力快速实现文件压缩解压功能!
· Ollama——大语言模型本地部署的极速利器
· DeepSeek如何颠覆传统软件测试?测试工程师会被淘汰吗?
· 使用C#创建一个MCP客户端