
安大略理工大学【综述】自动驾驶中的高精地图生成技术
2023-01-11 13:40 计算机视觉life 阅读(77) 评论(0) 编辑 收藏 举报 安大略理工大学【综述】自动驾驶中的高精地图生成技术
安大略理工大学【综述】自动驾驶中的高精地图生成技术
以下内容来自从零开始机器人SLAM知识星球 每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# High-Definition Map Generation Technologies For Autonomous Driving
论文地址:https://arxiv.org/abs/2206.05400
作者单位:安大略理工大学
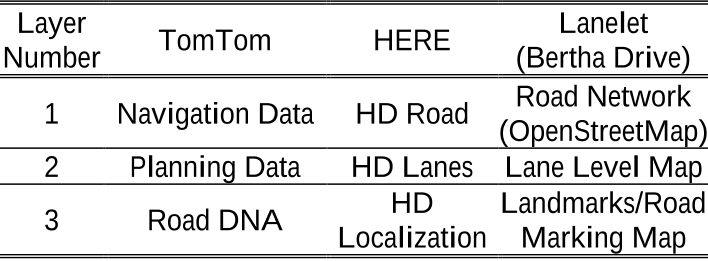
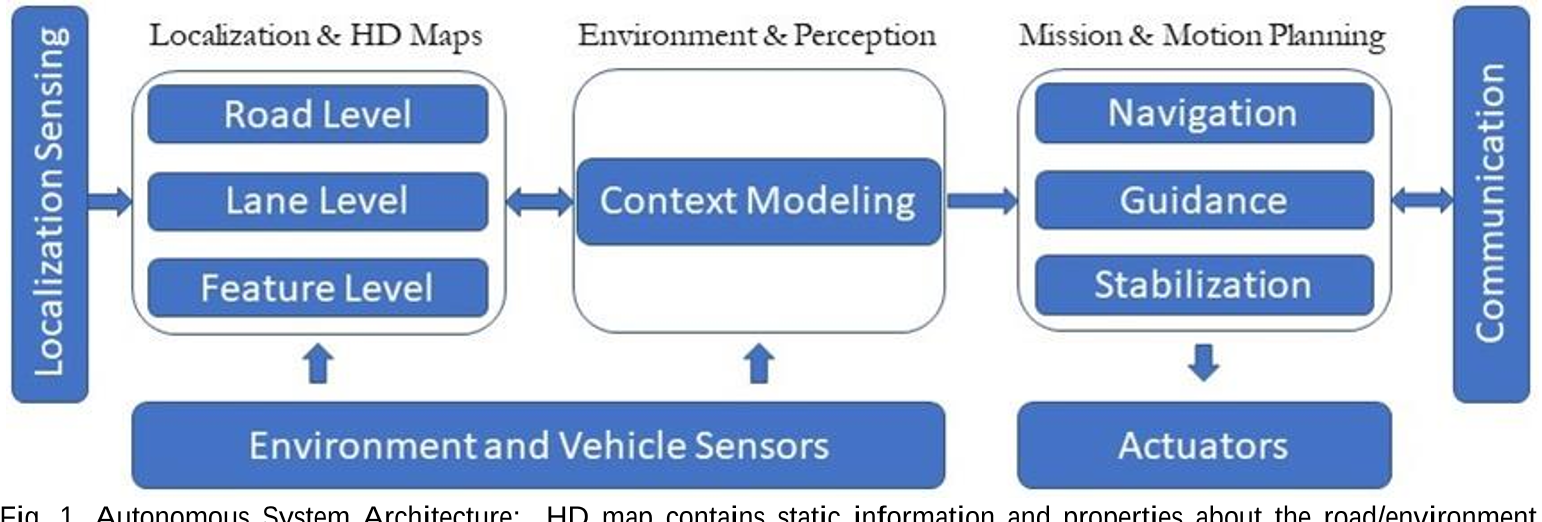
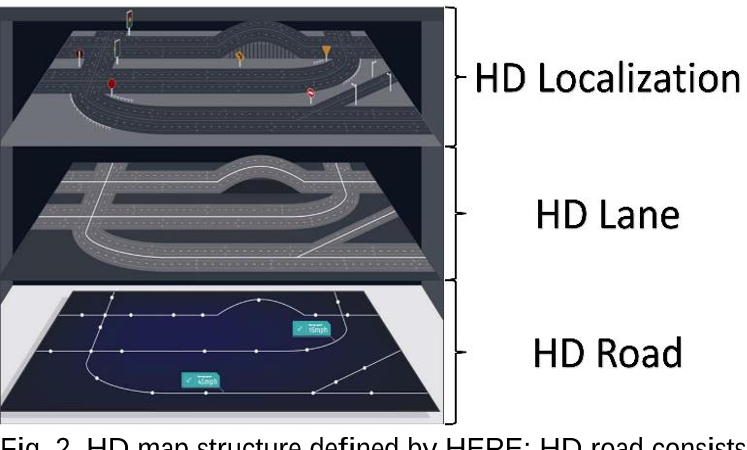
在过去的几年里,自动驾驶一直是最受欢迎的且具有挑战性的课题之一。在实现完全自主的道路上,研究人员使用了各种传感器,例如 ELMo、相机、惯性测量单元 (IMU) 和 GPS,并为自主驾驶开发了智能算法,例如目标检测、图像分割、避障和路径规划。近年来,高精度(HD)地图引起了广泛关注。由于 HD 地图在本地化中的高精度和信息水平很高,成为自动驾驶汽车的关键组成部分之一。
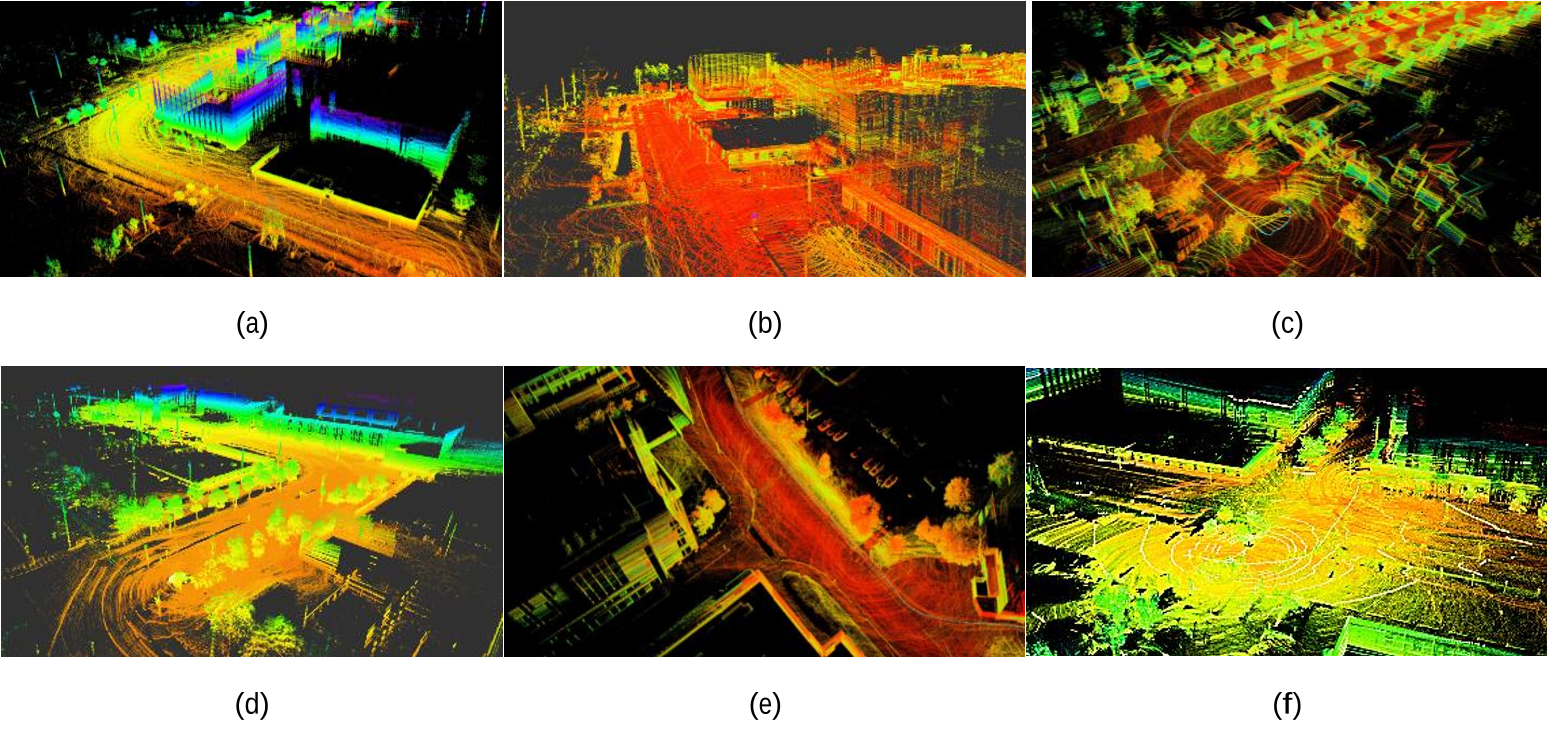
从百度阿波罗、NVIDIA 等大型组织到个别研究人员中,研究人员为不同的场景和自动驾驶汽车创建了 HD 地图。本文回顾了最近利用 2D 和 3D 地图生成的 HD 地图生成技术。本文介绍了HD地图的概念及其在自动驾驶汽车中的作用,并详细概述了 HD 地图生成技术。我们还将讨论当前 HD 地图生成技术的局限性,以促进未来的研究

以上内容来自从零开始机器人SLAM知识星球 每日更新内容


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 单元测试从入门到精通
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律