稠密单目SLAM,实时、稠密地重建三维场景
2023-01-10 09:51 计算机视觉life 阅读(432) 评论(0) 收藏 举报以下内容来自从零开始机器人SLAM知识星球 每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# Probabilistic Volumetric Fusion for Dense Monocular SLAM
论文地址:https://arxiv.org/abs/2210.01276
作者单位:麻省理工学院
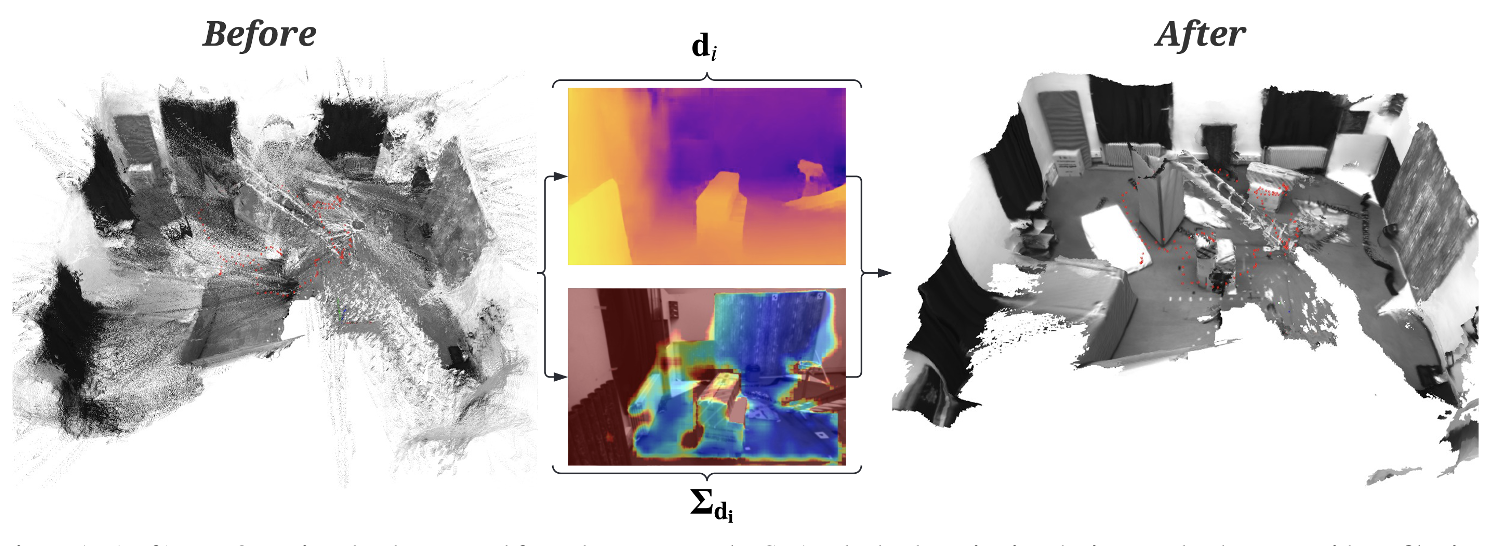
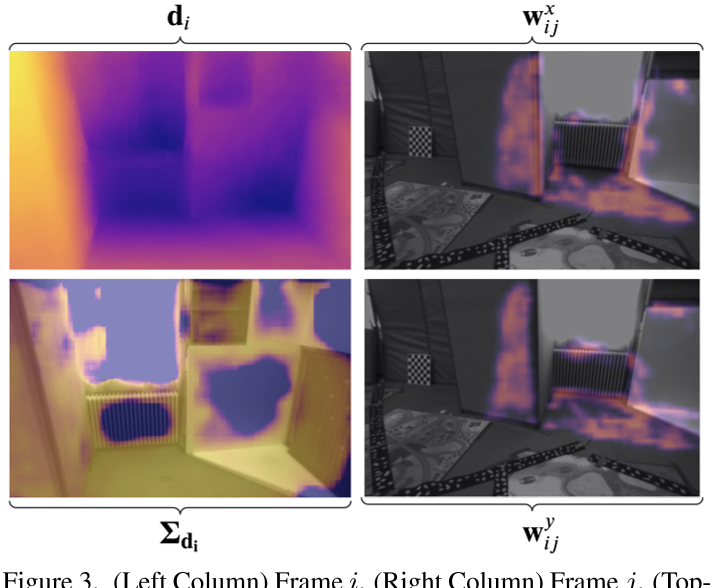
本文提出了一种利用稠密深度单目SLAM和快速不确定性传播的图像三维场景重建方法。该方法能够精确、实时、稠密地重建三维场景,同时对来自稠密单目SLAM的极噪声深度估计具有鲁棒性。与之前的方法不同,我们的概率深度不确定性直接来自SLAM中底层BA问题的信息矩阵,这些方法要么使用临时深度滤波器,要么从RGB-D相机的传感器模型中估计深度不确定性。
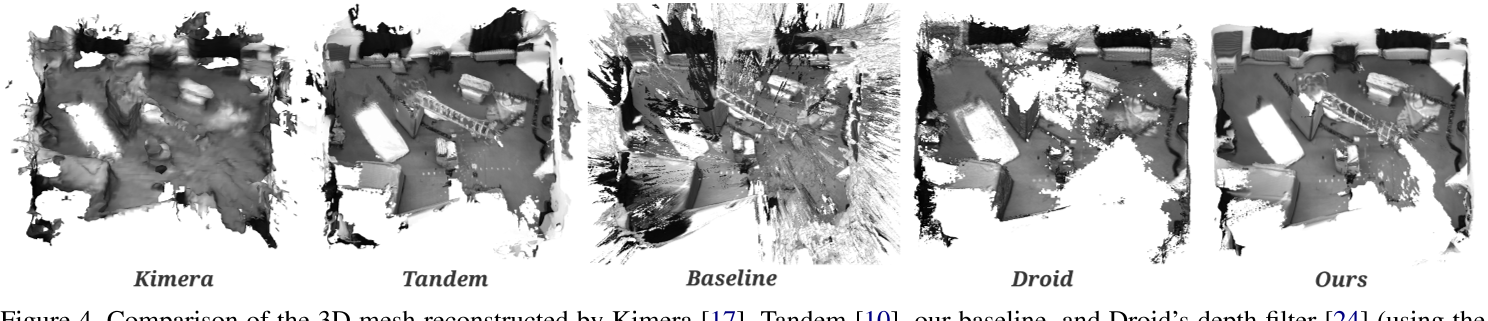
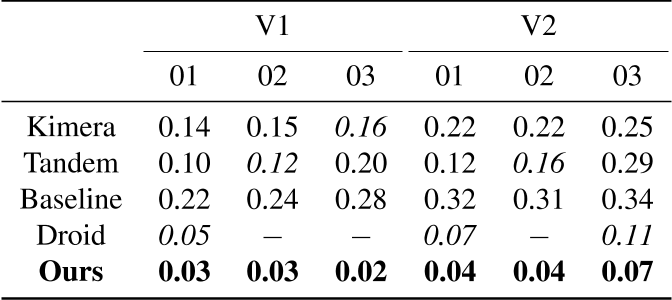
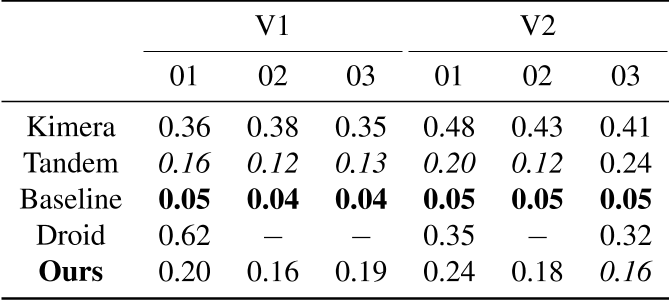
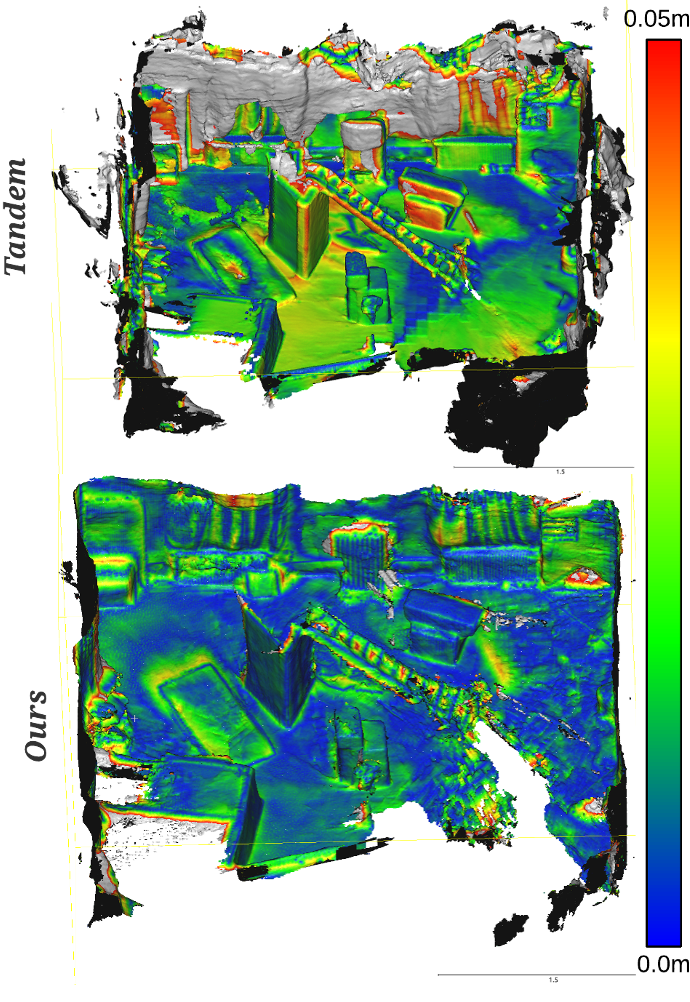
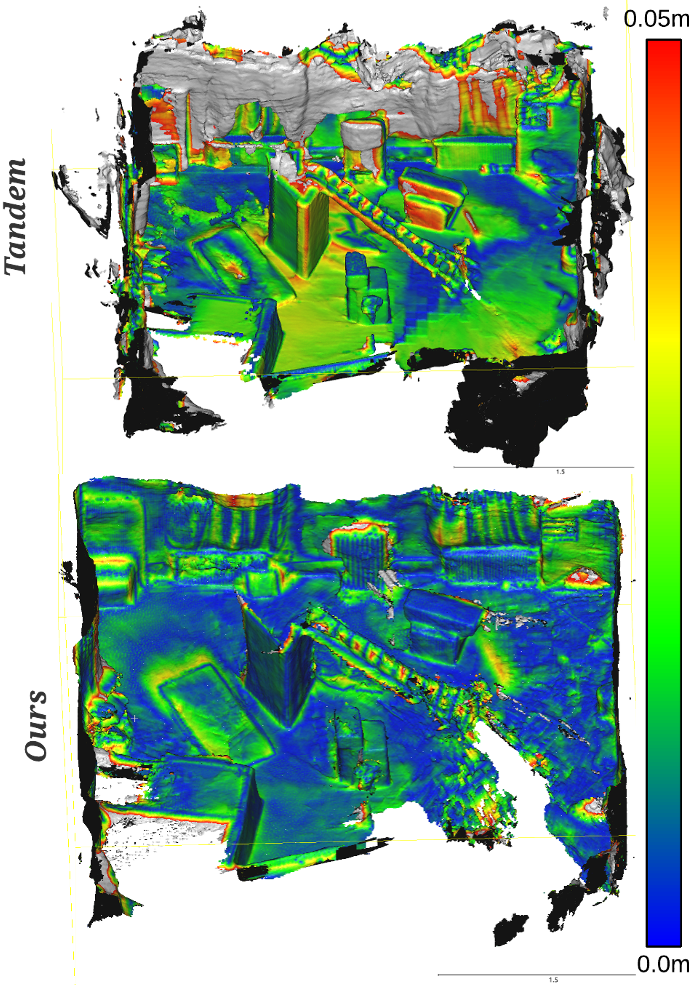
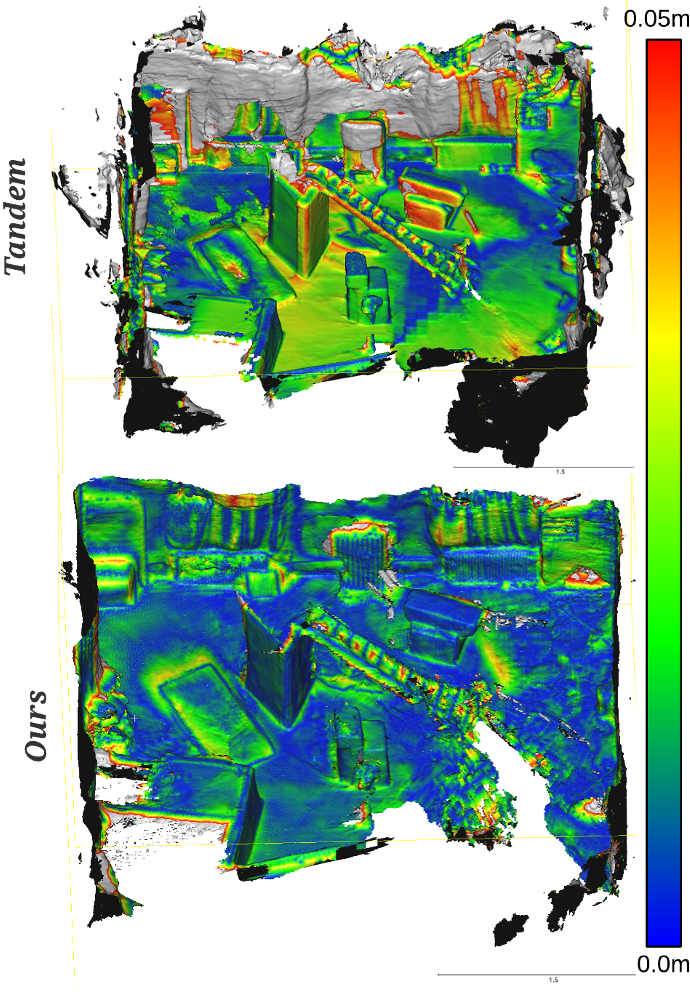
我们表明,由此产生的深度不确定性为体积融合的建图提供了一个极好的信号。在没有深度不确定性的情况下,生成的网格是有噪声的,而我们的方法生成的精确3D网格具有明显较少的工件。我们提供了具有挑战性的Euroc数据集的结果,并表明我们的方法比直接从深度单目相机SLAM的准确率提高了92%,与最佳竞争方法相比提高了90%。
本文贡献如下:
1、我们提出了一种方法,稠密SLAM信息矩阵派生的不确定性来确定融合稠密深度地图的权重。
2、我们的方法使场景的重建达到一个给定的可容忍的最大不确定性水平。与其他方法相比,我们可以以更高的精度重建场景,同时实时运行,并且只使用单目图像。
3、我们在具有挑战性的EuRoC数据集中实现了最先进的3D重建性能。
以上内容来自从零开始机器人SLAM知识星球 每日更新内容

 浙公网安备 33010602011771号
浙公网安备 33010602011771号