动态对象跟踪 SLAM:DyOb-SLAM
2023-01-06 10:19 计算机视觉life 阅读(326) 评论(0) 收藏 举报 动态对象跟踪 SLAM:DyOb-SLAM
动态对象跟踪 SLAM:DyOb-SLAM
以下内容来自从零开始机器人SLAM知识星球 每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# DyOb-SLAM : Dynamic Object Tracking SLAM System
论文地址:https://arxiv.org/abs/2211.01941
作者单位:俄克拉荷马大学
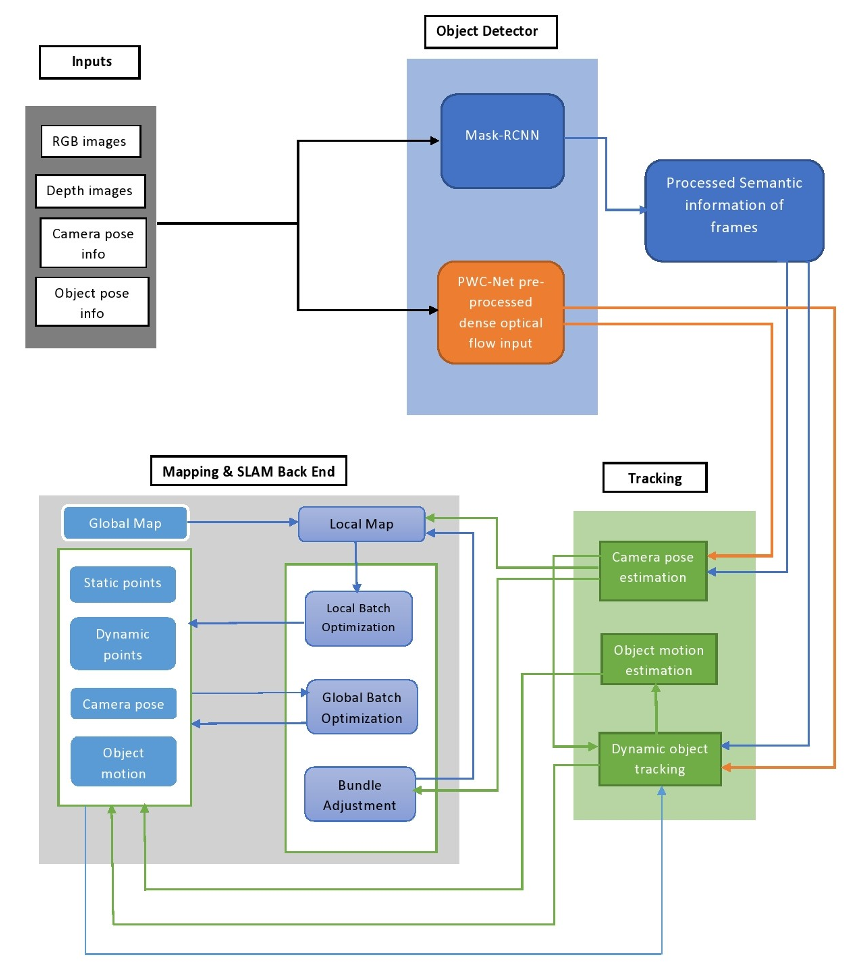
同时定位和建图(SLAM)是在其周围环境中的主体的定位和建图之间建立相互关系的过程。在不同传感器的帮助下,开发了各种类型的 SLAM 系统来处理建立定位和建图之间的关系的问题。SLAM 过程的一个限制是在环境建图中缺乏对动态对象的考虑。我们提出了动态对象跟踪 SLAM(DyOb-SLAM),这是一个视觉 SLAM 系统,可以定位和建图环境中的周围动态对象,以及跟踪每一帧中的动态对象。借助神经网络和密集光流算法,可以区分环境中的动态对象和静态对象。
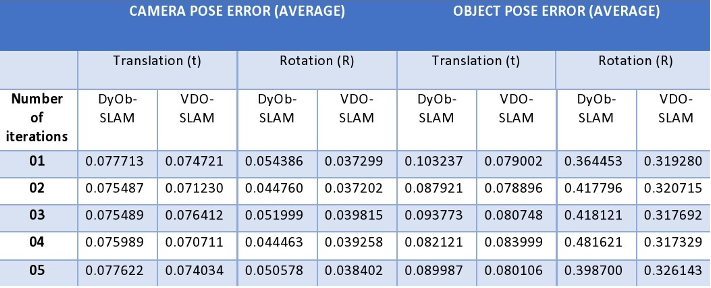
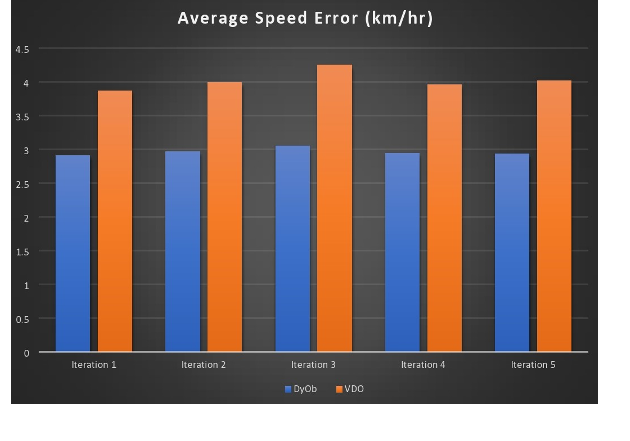
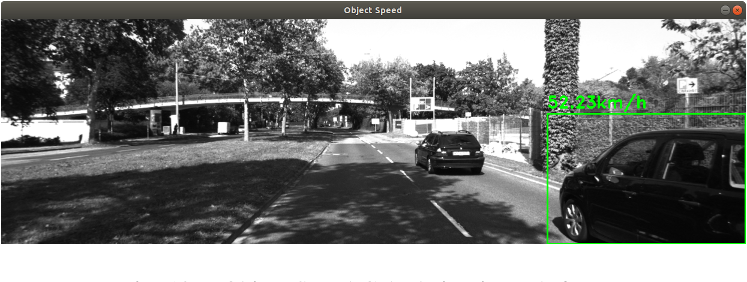
DyOb-SLAM 为静态和动态内容创建两个独立的地图。对于静态特征,获得稀疏图。对于动态内容,创建轨迹全局图作为输出。结果,获得了基于帧到帧实时的动态对象跟踪系统。通过动态物体和相机的位姿计算,DyOb-SLAM 可以估计动态物体随时间变化的速度。通过将 DyOb-SLAM 与类似的视觉 SLAM 系统 VDO-SLAM 进行比较来观察 DyOb-SLAM 的性能,并通过计算相机和物体姿态误差以及物体速度误差来测量性能。


以上内容来自从零开始机器人SLAM知识星球 每日更新内容

 浙公网安备 33010602011771号
浙公网安备 33010602011771号