【实用】MSCKF 的增强版本Fast-MSCKF,速度快6倍,精度提升20%
2022-12-28 09:31 计算机视觉life 阅读(394) 评论(0) 收藏 举报 【实用】MSCKF 的增强版本Fast-MSCKF,速度快6倍,精度提升20%
【实用】MSCKF 的增强版本Fast-MSCKF,速度快6倍,精度提升20%
以下内容来自从零开始机器人SLAM知识星球 每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# An Improved Multi-State Constraint Kalman Filter for Visual-Inertial Odometry
论文地址:https://arxiv.org/abs/2210.08117
作者单位:谢里夫理工大学
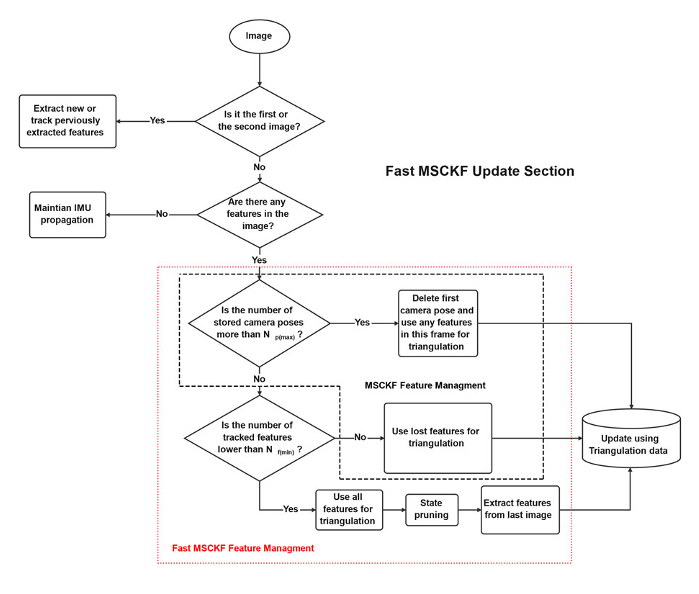
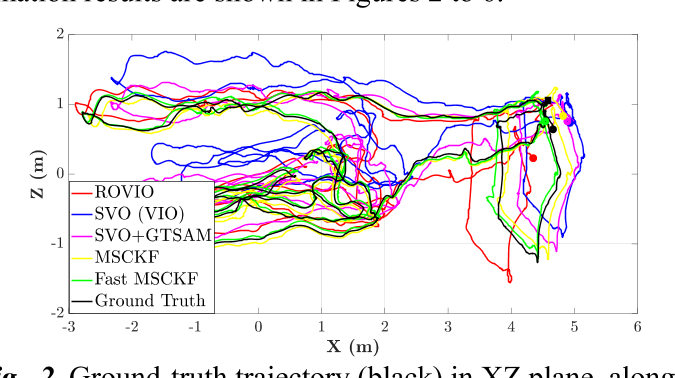
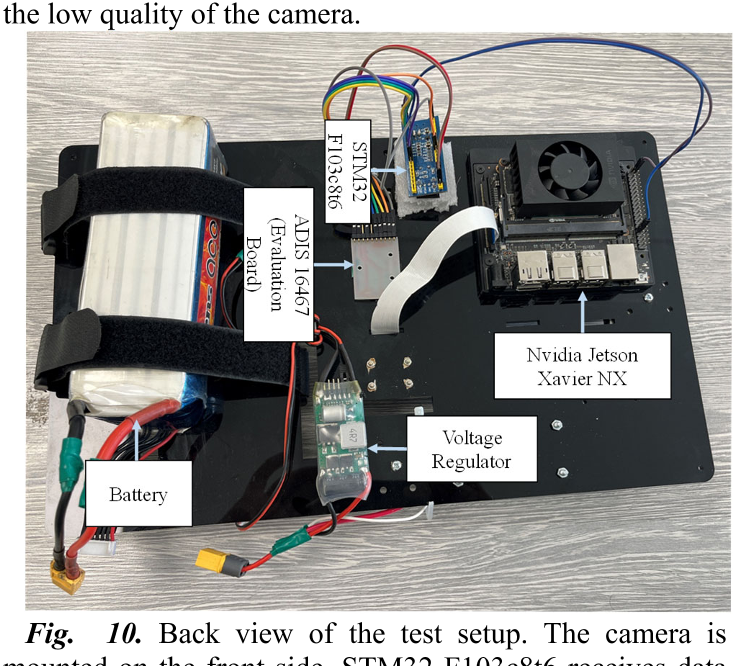
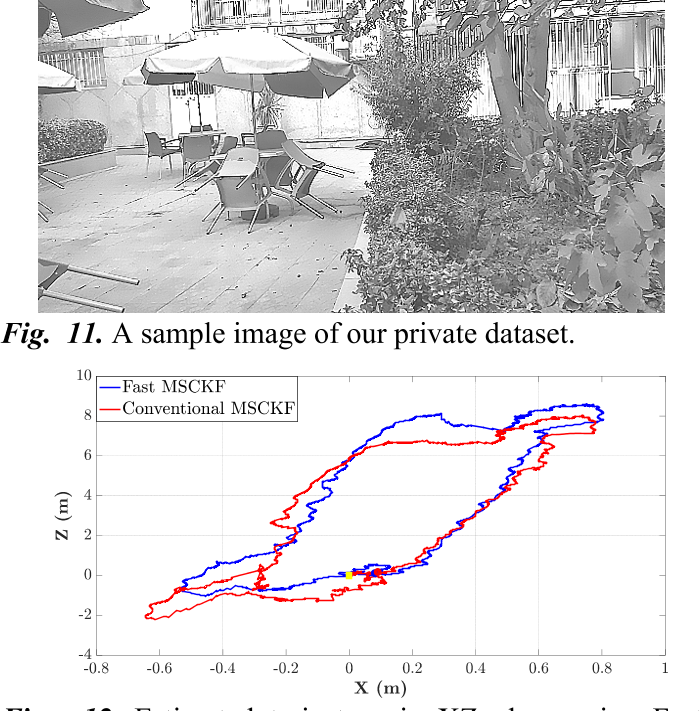
快速姿态估计(PE)对于敏捷机器人的性能至关重要。 GPS 和 GNSS 等全球定位系统通常与用于 PE 的惯性导航系统 (INS) 融合使用。然而,低更新率和缺乏适当的信号使其在室内和城市应用中不实用。另一方面,视觉惯性里程计 (VIO) 作为 GNSS/INS 系统在 GPS 拒绝环境中的实用替代方案越来越受欢迎。在众多基于 VIO 的方法中,多状态约束卡尔曼滤波器 (MSCKF) 因其鲁棒性、速度和准确性而受到更多关注。为此,在资源受限的车辆上实时实施 MSCKF 的图像处理相关的高计算成本仍然是一项具有挑战性的持续研究。在本文中,提出了MSCKF 的增强版本。为此,提出了不同的特征边缘化和状态修剪策略,从而产生更快的算法。所提出的算法在开源数据集和实际实验中进行了测试以进行验证。结果表明,与标准 MSCKF 算法相比,所提出的 Fast-MSCKF (FMSCKF) 在最终位置估计方面的速度大约快了 6 倍,并且准确度至少提高了 20%。


以上内容来自从零开始机器人SLAM知识星球 每日更新内容

 浙公网安备 33010602011771号
浙公网安备 33010602011771号