
【开源代码】基于相机-激光雷达融合的三维实时跟踪框架
2022-12-08 14:25 计算机视觉life 阅读(274) 评论(0) 编辑 收藏 举报 【开源代码】基于相机-激光雷达融合的三维实时跟踪框架
【开源代码】基于相机-激光雷达融合的三维实时跟踪框架
以下内容来自从零开始机器人SLAM知识星球 每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# DeepFusionMOT: A 3D Multi-Object Tracking Framework Based onCamera-LiDAR Fusion with Deep Association
论文地址:[2202.12100] DeepFusionMOT: A 3D Multi-Object Trac...
作者单位:重庆大学
开源代码:GitHub - wangxiyang2022/DeepFusionMOT: Code for RA...
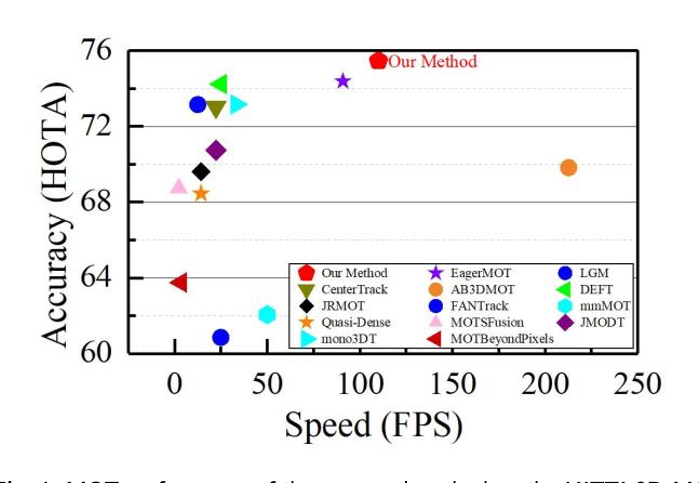
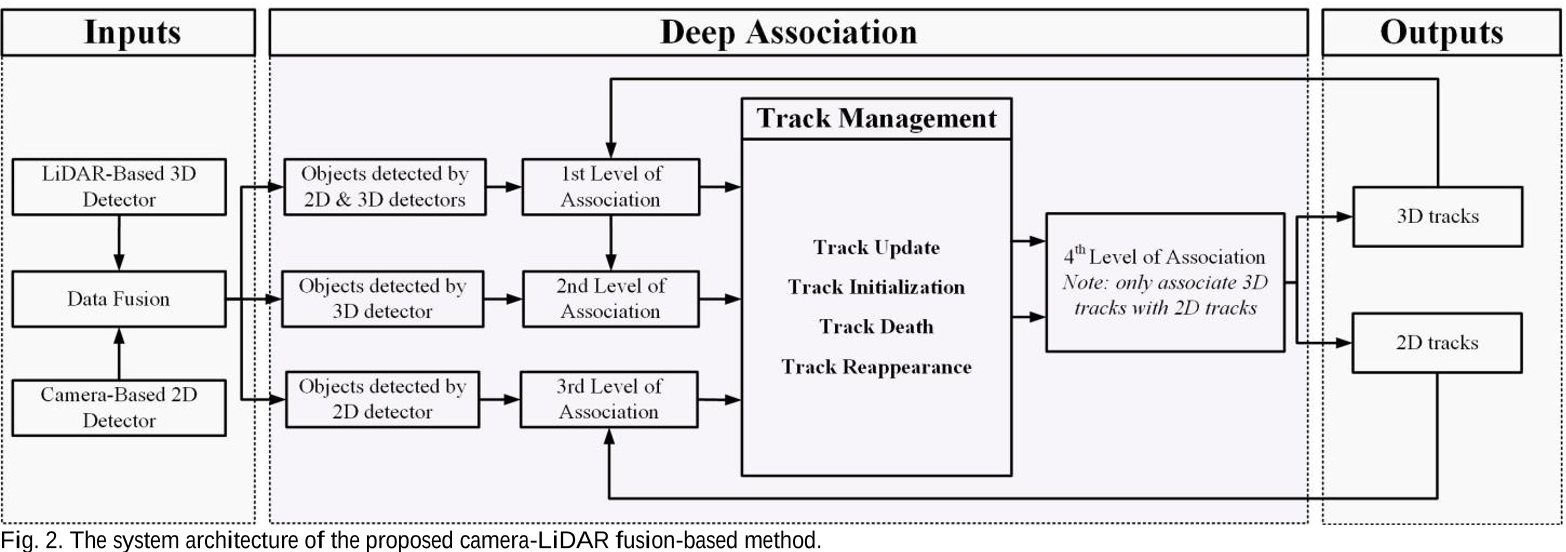
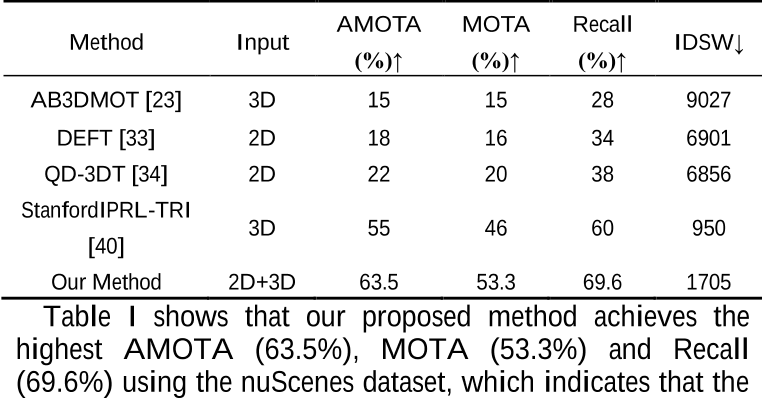
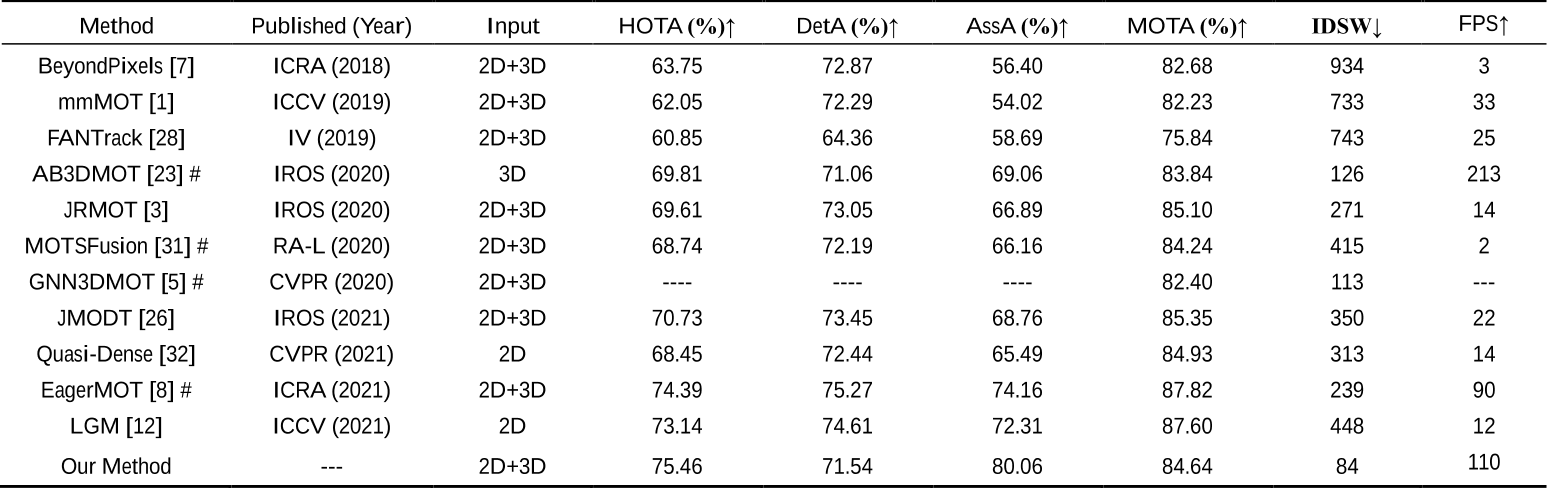
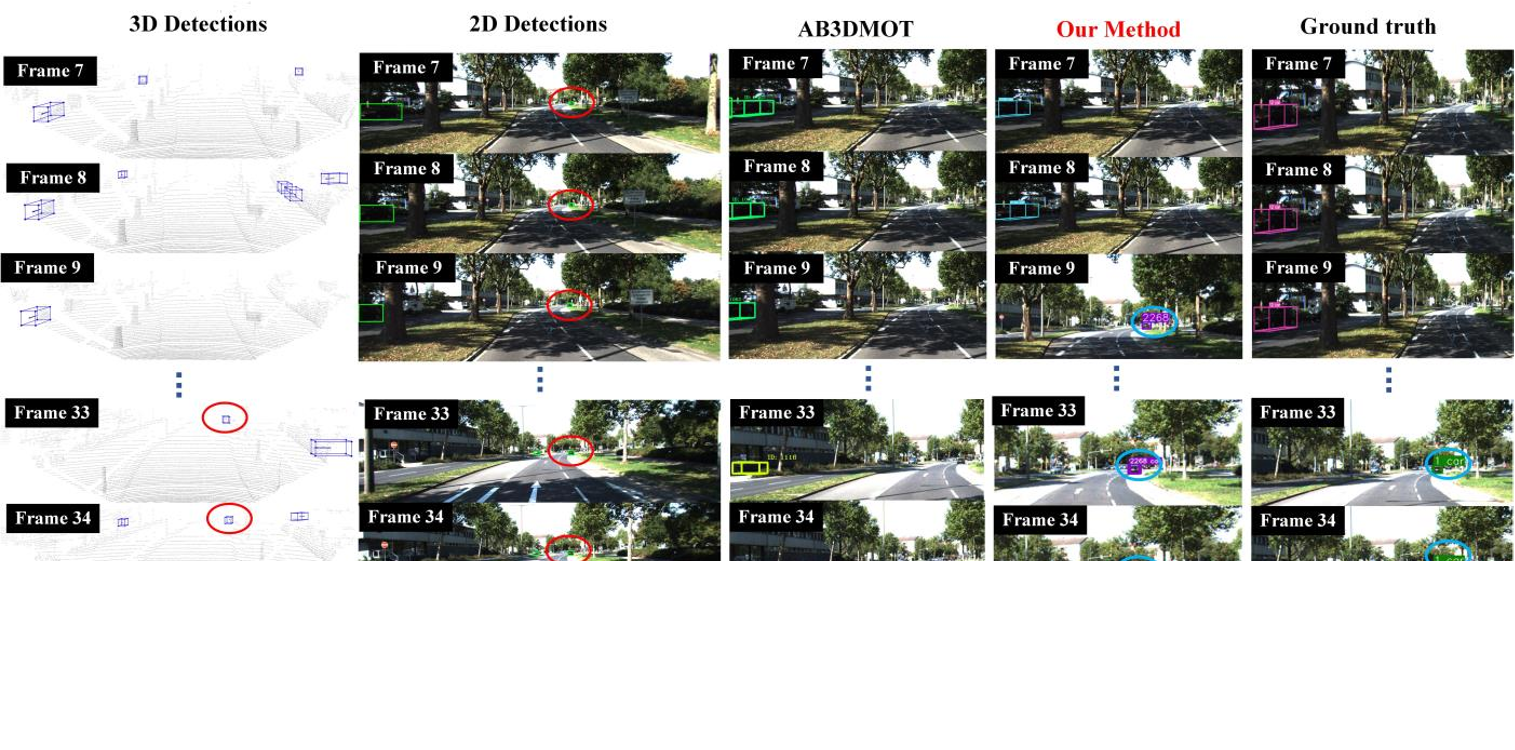
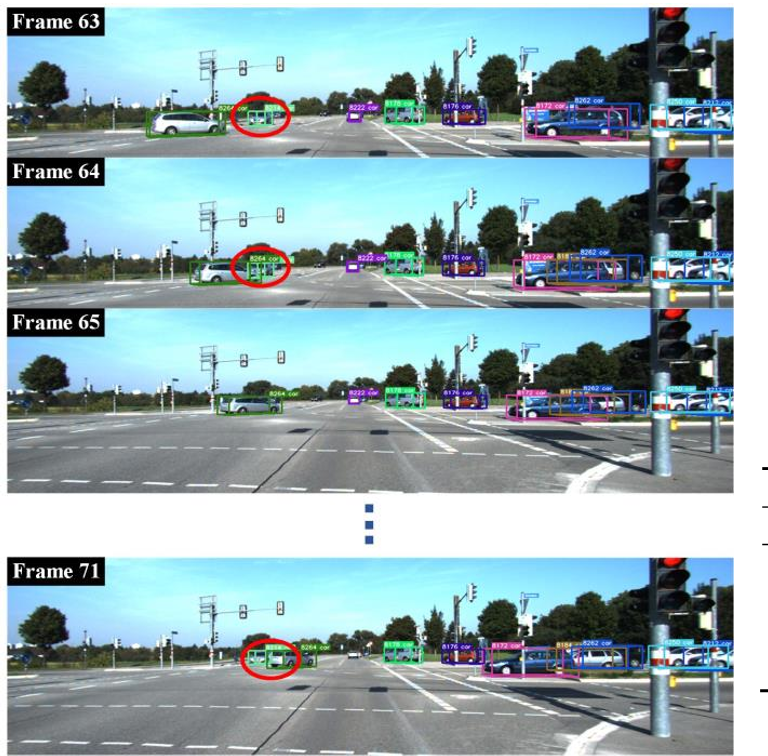
在最近的文献中,一方面,许多三维多目标跟踪(MOT)的工作都关注于跟踪精度而忽略了计算速度,通常通过设计相当复杂的代价函数和特征提取器。另一方面,有些方法过于注重计算速度,而牺牲了跟踪精度。针对这些问题,本文提出了一种鲁棒、快速的基于相机-激光雷达融合的MOT方法,该方法在精度和速度之间取得了良好的平衡。基于相机和激光雷达传感器的特点,设计了一种有效的深度关联机制,并将其嵌入到MOT方法中。该关联机制实现了当物体距离较远且仅被相机检测到时,在二维域内对物体进行叠加;当物体出现在激光雷达视场内时,用获得的三维信息更新二维轨迹,实现了二维和三维轨迹的平滑融合。基于典型数据集的大量实验表明,该方法在跟踪精度和处理速度方面均优于现有的MOT方法。
本文贡献如下:
1、提出了一种基于相机-激光雷达融合的三维实时跟踪框架,在典型的跟踪数据集上实现了优异的运动性能。
2、提出了一种新的深度关联机制,该机制充分利用了相机和LiDAR的特点。这种机制不涉及任何复杂的成本函数或特征提取网络,同时有效地融合了2D和3D轨迹。
3、提出的跟踪框架具有快速的计算速度和易于实时实现。
4、提出的跟踪框架可以与任意2D和3D检测器结合使用,这使得它广泛适用于各种场景。
以上内容来自从零开始机器人SLAM知识星球 每日更新内容


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 周边上新:园子的第一款马克杯温暖上架
· 分享 3 个 .NET 开源的文件压缩处理库,助力快速实现文件压缩解压功能!
· Ollama——大语言模型本地部署的极速利器
· DeepSeek如何颠覆传统软件测试?测试工程师会被淘汰吗?
· 使用C#创建一个MCP客户端