
宾夕法尼亚大学开源!第一个将语义SLAM实时集成到自主无人机反馈回路
2022-11-29 11:10 计算机视觉life 阅读(141) 评论(0) 编辑 收藏 举报以下内容来自从零开始机器人SLAM知识星球 每日更新内容
论文# Large-scale Autonomous Flight with Real-time Semantic SLAM under Dense Forest Canopy
论文地址:https://arxiv.org/abs/2109.06479v4
作者单位:宾夕法尼亚大学
开源代码:https://github.com/KumarRobotics/sloam
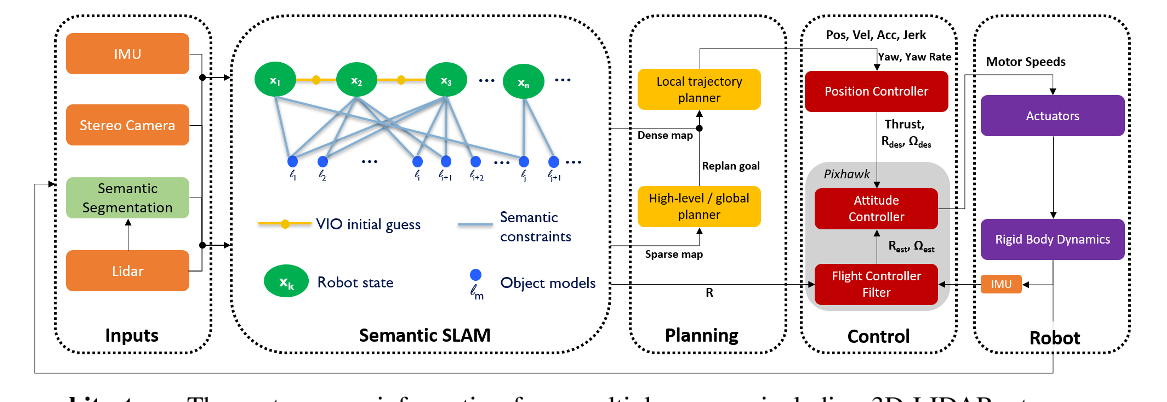
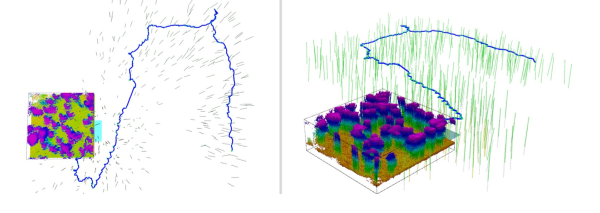
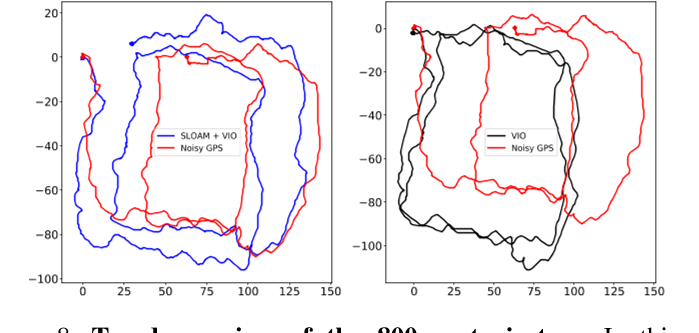
语义建图使用一组语义对象表示环境。这种表示具有存储效率、更少的歧义和更多的信息,从而促进了大规模自治和在高度非结构化、没有gps的环境中获取可操作的信息。在这篇文章中,我们提出了一个系统,可以在具有挑战性的树冠下环境中执行大规模自主飞行和实时语义建图。我们从激光雷达数据中检测和建模树干和地面平面,这些数据通过扫描相关联,并用于约束机器人位姿和树干模型。自主导航模块利用多级规划和建图框架,计算动态可行轨迹,引导无人机以计算和存储高效的方式构建用户定义的感兴趣区域的语义地图。设计了一种漂移补偿机制,利用语义SLAM输出实时最小化里程计漂移,同时保持规划器的最优性和控制器的稳定性。这导致无人机在规模上精确和安全地执行其任务。本文的主要贡献有:
1、第一个将语义SLAM实时集成到自主无人机反馈回路中的系统,而仅依靠机载传感和计算。语义SLAM与漂移补偿机制相结合,使无人机里程测量漂移最小化。2、我们提出了一种无人机硬件和软件系统,能够在大规模、非结构化、杂乱和gps拒绝的环境中进行远程自主飞行。

以下内容来自从零开始机器人SLAM知识星球 每日更新内容


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 周边上新:园子的第一款马克杯温暖上架
· 分享 3 个 .NET 开源的文件压缩处理库,助力快速实现文件压缩解压功能!
· Ollama——大语言模型本地部署的极速利器
· DeepSeek如何颠覆传统软件测试?测试工程师会被淘汰吗?
· 使用C#创建一个MCP客户端
2018-11-29 从零开始一起学习SLAM | SLAM有什么用?
2018-11-29 从零开始一起学习SLAM | 学习SLAM到底需要学什么?