从零开始一起学习SLAM | 掌握g2o顶点编程套路
2019-02-28 17:51 计算机视觉life 阅读(1333) 评论(0) 收藏 举报点“计算机视觉life”关注,置顶更快接收消息!
小白:师兄,上一次将的g2o框架《从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码》真的很清晰,我现在再去看g2o的那些优化的部分,基本都能看懂了呢!
师兄:那太好啦,以后多练习练习,加深理解
小白:嗯,我开始编程时,发现g2o的顶点和边的定义也非常复杂,光看十四讲里面,就有好几种不同的定义,完全懵圈状态。。。师兄,能否帮我捋捋思路啊
师兄:嗯,你说的没错,入门的时候确实感觉很乱,我最初也是花了些时间才搞懂的,下面分享一下。
g2o的顶点(Vertex) 从哪里来的?
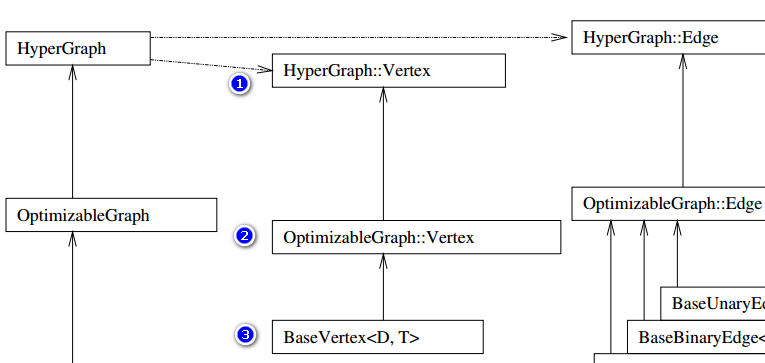
师兄:在《g2o: A general Framework for (Hyper) Graph Optimization》这篇文档里,我们找到那张经典的类结构图。也就是上次讲框架用到的那张结构图。其中涉及到顶点 (vertex) 的就是下面 加了序号的3个东东了。
小白:记得呢,这个图很关键,帮助我理清了很多思路,原来来自这篇文章啊
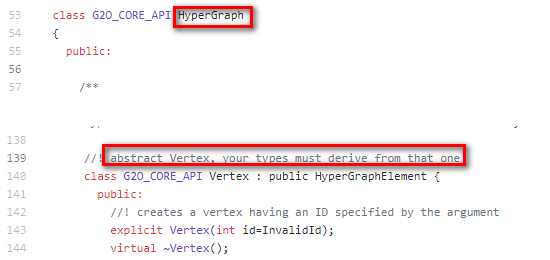
师兄:对,下面我们一步步来看吧。先来看看上图中和vertex有关的第①个类: HyperGraph::Vertex,在g2o的GitHub上(https://github.com/RainerKuemmerle/g2o),它在这个路径
g2o/core/hyper_graph.h
这个 HyperGraph::Vertex 是个abstract vertex,必须通过派生来使用。如下图所示
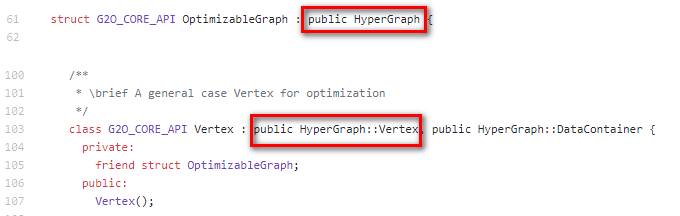
然后我们看g2o 类结构图中第②个类,我们看到HyperGraph::Vertex 是通过类OptimizableGraph 来继承的, 而OptimizableGraph的定义在
g2o/core/optimizable_graph.h
我们找到vertex定义,发现果然,OptimizableGraph 继承自 HyperGraph,如下图所示
不过,这个OptimizableGraph::Vertex 也非常底层,具体使用时一般都会进行扩展,因此g2o中提供了一个比较通用的适合大部分情况的模板。就是g2o 类结构图中 对应的第③个类:
BaseVertex<D, T>
那么它在哪里呢? 在这个路径:
g2o/core/base_vertex.h
小白:哇塞,原来是这样抽丝剥茧的呀,学习了,授人以鱼不如授人以渔啊!
师兄:嗯,其实就是根据那张图结合g2o GitHub代码就行了
g2o的顶点(Vertex) 参数如何理解?
小白:那是不是就可以开始用了?
师兄:别急,我们来看看参数吧,这个很关键。
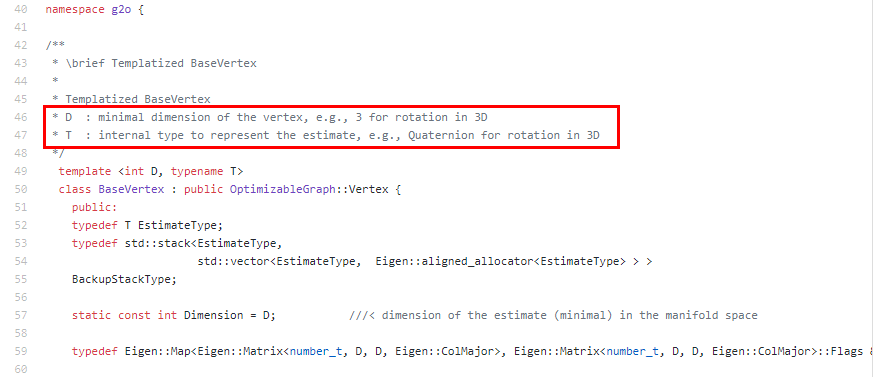
我们来看一下模板参数 D 和 T,翻译一下上图红框:
D是int 类型的,表示vertex的最小维度,比如3D空间中旋转是3维的,那么这里 D = 3
T是待估计vertex的数据类型,比如用四元数表达三维旋转的话,T就是Quaternion 类型
小白:哦哦,大概理解了,但还是有点模糊
师兄:我们进一步来细看一下D, T。这里的D 在源码里面是这样注释的
static const int Dimension = D; ///< dimension of the estimate (minimal) in the manifold space
可以看到这个D并非是顶点(更确切的说是状态变量)的维度,而是其在流形空间(manifold)的最小表示,这里一定要区别开,另外,源码里面也给出了T的作用
typedef T EstimateType;
EstimateType _estimate;
可以看到,这里T就是顶点(状态变量)的类型,跟前面一样。
小白:Got it!
如何自己定义顶点?
小白:师兄,我们是不是可以开始写顶点定义了?
师兄:嗯,我们知道了顶点的基本类型是 BaseVertex<D, T>,那么下一步关心的就是如何使用了,因为在不同的应用场景(二维空间,三维空间),有不同的待优化变量(位姿,空间点),还涉及不同的优化类型(李代数位姿、李群位姿)
小白:这么多啊,那要自己根据 BaseVertex 一个个实现吗?
师兄:那不需要!g2o本身内部定义了一些常用的顶点类型,我给找出来了,大概这些:
VertexSE2 : public BaseVertex<3, SE2> //2D pose Vertex, (x,y,theta)
VertexSE3 : public BaseVertex<6, Isometry3> //6d vector (x,y,z,qx,qy,qz) (note that we leave out the w part of the quaternion)
VertexPointXY : public BaseVertex<2, Vector2>
VertexPointXYZ : public BaseVertex<3, Vector3>
VertexSBAPointXYZ : public BaseVertex<3, Vector3>
// SE3 Vertex parameterized internally with a transformation matrix and externally with its exponential map
VertexSE3Expmap : public BaseVertex<6, SE3Quat>
// SBACam Vertex, (x,y,z,qw,qx,qy,qz),(x,y,z,qx,qy,qz) (note that we leave out the w part of the quaternion.
// qw is assumed to be positive, otherwise there is an ambiguity in qx,qy,qz as a rotation
VertexCam : public BaseVertex<6, SBACam>
// Sim3 Vertex, (x,y,z,qw,qx,qy,qz),7d vector,(x,y,z,qx,qy,qz) (note that we leave out the w part of the quaternion.
VertexSim3Expmap : public BaseVertex<7, Sim3>
小白:好全啊,我们可以直接用啦!
师兄:当然我们可以直接用这些,但是有时候我们需要的顶点类型这里面没有,就得自己定义了。
重新定义顶点一般需要考虑重写如下函数:
virtual bool read(std::istream& is);
virtual bool write(std::ostream& os) const;
virtual void oplusImpl(const number_t* update);
virtual void setToOriginImpl();
小白:这些函数啥意思啊,我也就能看懂 read 和 write(/尴尬脸),还有每次定义都要重新写这几个函数吗?
师兄:是的,这几个是主要要改的地方。我们来看一下他们都是什么意义:
read,write:分别是读盘、存盘函数,一般情况下不需要进行读/写操作的话,仅仅声明一下就可以
setToOriginImpl:顶点重置函数,设定被优化变量的原始值。
oplusImpl:顶点更新函数。非常重要的一个函数,主要用于优化过程中增量△x 的计算。我们根据增量方程计算出增量之后,就是通过这个函数对估计值进行调整的,因此这个函数的内容一定要重视。
自己定义 顶点一般是下面的格式:
class myVertex: public g2::BaseVertex<Dim, Type>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
myVertex(){}
virtual void read(std::istream& is) {}
virtual void write(std::ostream& os) const {}
virtual void setOriginImpl()
{
_estimate = Type();
}
virtual void oplusImpl(const double* update) override
{
_estimate += /*update*/;
}
}
小白:看不太懂啊,师兄
师兄:没事,我们看例子就知道了,先看一个简单例子,来自十四讲中的曲线拟合,来源如下
ch6/g2o_curve_fitting/main.cpp
// 曲线模型的顶点,模板参数:优化变量维度和数据类型
class CurveFittingVertex: public g2o::BaseVertex<3, Eigen::Vector3d>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
virtual void setToOriginImpl() // 重置
{
_estimate << 0,0,0;
}
virtual void oplusImpl( const double* update ) // 更新
{
_estimate += Eigen::Vector3d(update);
}
// 存盘和读盘:留空
virtual bool read( istream& in ) {}
virtual bool write( ostream& out ) const {}
};
我们可以看到下面代码中顶点初值设置为0,更新时也是直接把更新量 update 加上去的,知道为什么吗?
小白:更新不就是 x + △x 吗,这是定义吧
师兄:嗯,对于这个例子是可以直接加,因为顶点类型是Eigen::Vector3d,属于向量,是可以通过加法来更新的。但是但是有些例子就不行,比如下面这个复杂点例子:李代数表示位姿VertexSE3Expmap
来自g2o官网,在这里
g2o/types/sba/types_six_dof_expmap.h
/**
\* \brief SE3 Vertex parameterized internally with a transformation matrix
and externally with its exponential map
*/
class G2O_TYPES_SBA_API VertexSE3Expmap : public BaseVertex<6, SE3Quat>{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
VertexSE3Expmap();
bool read(std::istream& is);
bool write(std::ostream& os) const;
virtual void setToOriginImpl() {
_estimate = SE3Quat();
}
virtual void oplusImpl(const number_t* update_) {
Eigen::Map<const Vector6> update(update_);
setEstimate(SE3Quat::exp(update)*estimate()); //更新方式
}
};
小白:师兄,这个里面的6, SE3Quat 分别是什么意思?
师兄:书中都写了,以下来自十四讲的介绍:
第一个参数6 表示内部存储的优化变量维度,这是个6维的李代数
第二个参数是优化变量的类型,这里使用了g2o定义的相机位姿类型:SE3Quat。
在这里可以具体查看g2o/types/slam3d/se3quat.h
它内部使用了四元数表达旋转,然后加上位移来存储位姿,同时支持李代数上的运算,比如对数映射(log函数)、李代数上增量(update函数)等操作
说完了,那我现在问你个问题,为啥这里更新时没有像上面那样直接加上去?
小白:这个表示位姿,好像是不能直接加的我记得,原因有点忘了
师兄:嗯,是不能直接加,原因是变换矩阵不满足加法封闭。那我再问你,为什么相机位姿顶点类VertexSE3Expmap使用了李代数表示相机位姿,而不是使用旋转矩阵和平移矩阵?
小白:不造啊。。
师兄:其实也是上述原因的拓展:这是因为旋转矩阵是有约束的矩阵,它必须是正交矩阵且行列式为1。使用它作为优化变量就会引入额外的约束条件,从而增大优化的复杂度。而将旋转矩阵通过李群-李代数之间的转换关系转换为李代数表示,就可以把位姿估计变成无约束的优化问题,求解难度降低。
小白:原来如此啊,以前学的东西都忘了。。
师兄:以前学的要多看,温故而知新。我们继续看例子,刚才是位姿的例子,下面是三维点的例子,空间点位置 VertexPointXYZ,维度为3,类型是Eigen的Vector3,比较简单,就不解释了
class G2O_TYPES_SBA_API VertexSBAPointXYZ : public BaseVertex<3, Vector3>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
VertexSBAPointXYZ();
virtual bool read(std::istream& is);
virtual bool write(std::ostream& os) const;
virtual void setToOriginImpl() {
_estimate.fill(0);
}
virtual void oplusImpl(const number_t* update)
{
Eigen::Map<const Vector3> v(update);
_estimate += v;
}
};
如何向图中添加顶点?
师兄:往图中增加顶点比较简单,我们还是先看看第一个曲线拟合的例子,setEstimate(type) 函数来设定初始值;setId(int) 定义节点编号
// 往图中增加顶点
CurveFittingVertex* v = new CurveFittingVertex();
v->setEstimate( Eigen::Vector3d(0,0,0) );
v->setId(0);
optimizer.addVertex( v );
这个是添加 VertexSBAPointXYZ 的例子,都很容易看懂
/ch7/pose_estimation_3d2d.cpp
int index = 1;
for ( const Point3f p:points_3d ) // landmarks
{
g2o::VertexSBAPointXYZ* point = new g2o::VertexSBAPointXYZ();
point->setId ( index++ );
point->setEstimate ( Eigen::Vector3d ( p.x, p.y, p.z ) );
point->setMarginalized ( true );
optimizer.addVertex ( point );
}
至此,我们讲完了g2o 的顶点的来源,定义,自定义方法,添加方法,基本上你以后再看到顶点就不会陌生啦!
小白:太感谢啦!
编程练习
-
题目:给定一组世界坐标系下的3D点(p3d.txt)以及它在相机中对应的坐标(p2d.txt),以及相机的内参矩阵。
使用bundle adjustment 方法(g2o库实现)来估计相机的位姿T。初始位姿T为单位矩阵。
-
本程序学习目标:熟悉g2o库编写流程,熟悉顶点定义方法。
代码框架、数据及预期结果已经为你准备好了,公众号「计算机视觉life」后台回复:顶点,即可获得。
欢迎留言讨论,更多学习视频、文档资料、参考答案等关注计算机视觉life公众号,,菜单栏点击“知识星球”查看「从零开始学习SLAM」星球介绍,快来和其他小伙伴一起学习交流~
本文参考:
高翔《视觉SLAM十四讲》
https://www.jianshu.com/p/e16ffb5b265d
推荐阅读
从零开始一起学习SLAM | 为什么要学SLAM?
从零开始一起学习SLAM | 学习SLAM到底需要学什么?
从零开始一起学习SLAM | SLAM有什么用?
从零开始一起学习SLAM | C++新特性要不要学?
从零开始一起学习SLAM | 为什么要用齐次坐标?
从零开始一起学习SLAM | 三维空间刚体的旋转
从零开始一起学习SLAM | 为啥需要李群与李代数?
从零开始一起学习SLAM | 相机成像模型
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 神奇的单应矩阵
从零开始一起学习SLAM | 你好,点云
从零开始一起学习SLAM | 给点云加个滤网
从零开始一起学习SLAM | 点云平滑法线估计
从零开始一起学习SLAM | 点云到网格的进化
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
零基础小白,如何入门计算机视觉?
SLAM领域牛人、牛实验室、牛研究成果梳理
我用MATLAB撸了一个2D LiDAR SLAM
可视化理解四元数,愿你不再掉头发
最近一年语义SLAM有哪些代表性工作?
视觉SLAM技术综述
汇总 | VIO、激光SLAM相关论文分类集锦

 浙公网安备 33010602011771号
浙公网安备 33010602011771号