【开源代码】首个专为自动驾驶中 LiDAR 和 IMU外参标定
2022-12-26 09:40 计算机视觉life 阅读(148) 评论(0) 收藏 举报 第一个专门为自动驾驶设计的开源代码,用于校准 LiDAR 和姿态传感器外部参数。
第一个专门为自动驾驶设计的开源代码,用于校准 LiDAR 和姿态传感器外部参数。
以下内容来自从零开始机器人SLAM知识星球 每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文##开源代码# An Extrinsic Calibration Method of a 3D-LiDAR and a Pose Sensor for Autonomous Driving
论文地址:[2209.07694] An Extrinsic Calibration Method of a ...作者单位:中国上海人工智能实验室
开源代码:GitHub - OpenCalib/LiDAR2INS
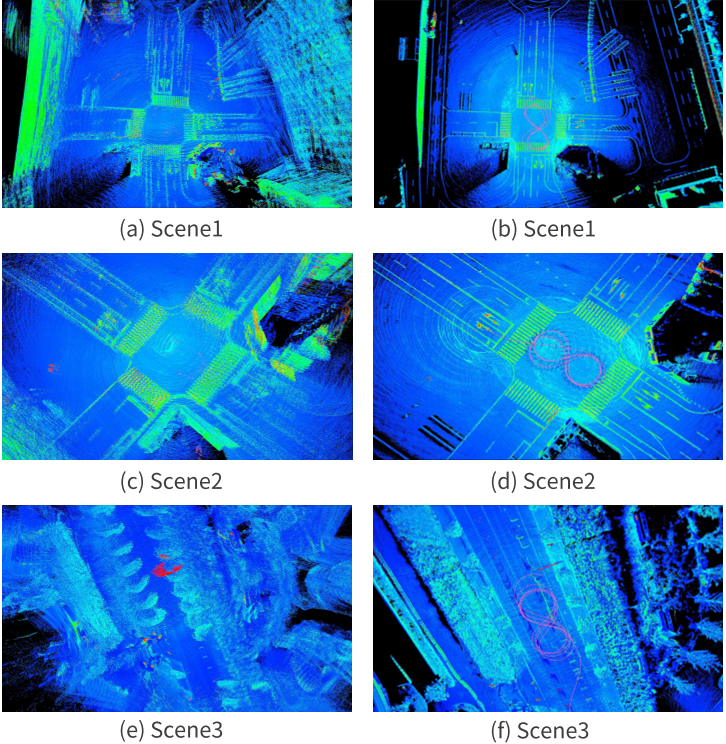
准确可靠的传感器标定对于在自动驾驶中融合 LiDAR 和惯性测量至关重要。本文提出了一种用于自动驾驶的 3D-LiDAR 和姿态传感器的新型三阶段外部校准方法。第一阶段可以通过点云表面特征快速标定传感器之间的外部参数,从而在很短的时间内将外部参数从较大的初始误差缩小到较小的误差范围。第二阶段可以进一步校准基于 LiDAR 建图空间占用的外部参数,同时消除运动失真。最后阶段对自主车辆平面运动引起的z轴误差进行修正,最终得到准确的外参数。具体来说,该方法利用了道路场景的自然特性,使其独立且易于在大规模条件下应用。真实世界数据集的实验结果证明了我们方法的可靠性和准确性。这些代码在 Github 网站上是开源的。据我们所知,这是第一个专门为自动驾驶设计的开源代码,用于校准 LiDAR 和姿态传感器外部参数。
本文贡献如下:1、所提出的方法是第一个已知的自动和从粗到精的校准方法,专门为自动驾驶设计,用于校准 LiDAR 和姿态传感器外部参数。2、 我们引入了一种通过直接最小化特征点到平面的距离来解决 LiDAR 和姿态传感器外部校准初始化的算法。3、定义了一种基于八叉树的空间占用细化方法,以进一步细化外部参数,以通过位姿传感器提高激光雷达的建图质量。通过基准点匹配提高了z轴的标定精度。4、在真实世界的数据集上进行评估,我们定量和定性地证明了我们方法的稳健性和准确性。





以上内容来自从零开始机器人SLAM知识星球 每日更新内容

 浙公网安备 33010602011771号
浙公网安备 33010602011771号