首个生物启发的记忆增强的lifelong SLAM系统BioSLAM
2022-12-13 14:38 计算机视觉life 阅读(207) 评论(0) 收藏 举报 首个生物启发的记忆增强的lifelong SLAM系统BioSLAM
首个生物启发的记忆增强的lifelong SLAM系统BioSLAM
以下内容来自从零开始机器人SLAM知识星球 每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# BioSLAM: A Bio-inspired Lifelong Memory System for General Place Recognition
论文地址:卡耐基梅隆大学
作者单位:[2208.14543] BioSLAM: A Bio-inspired Lifelong Memo...
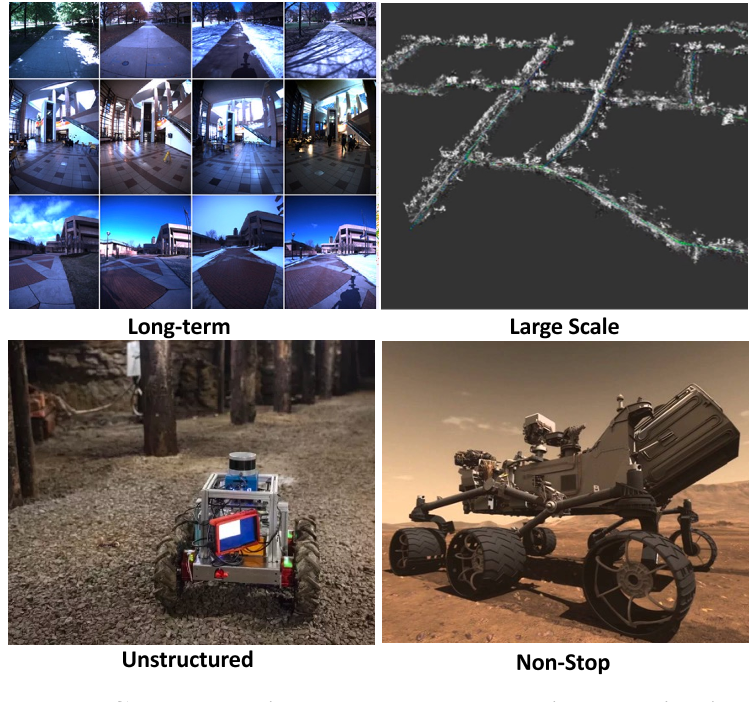
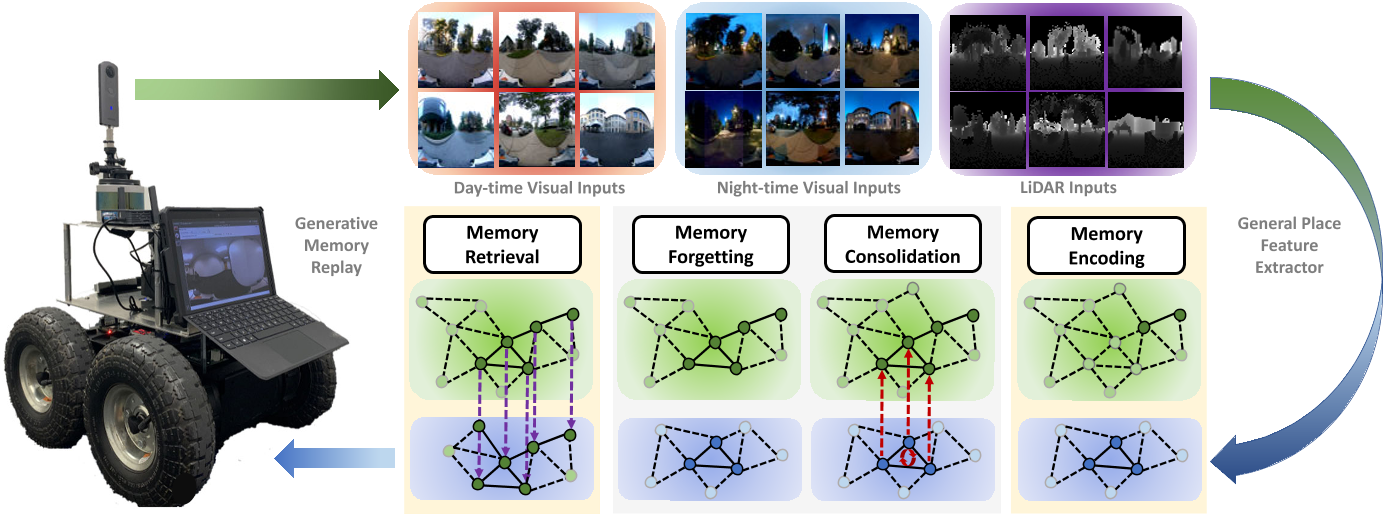
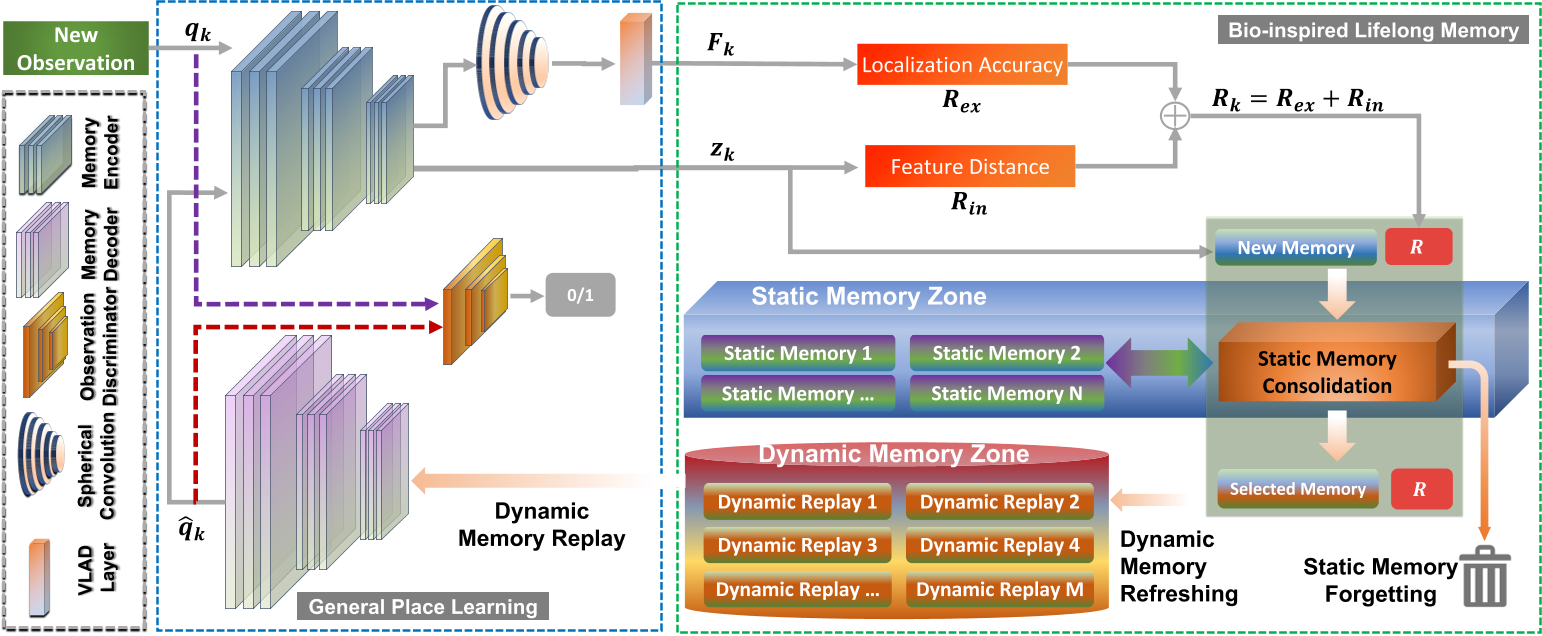
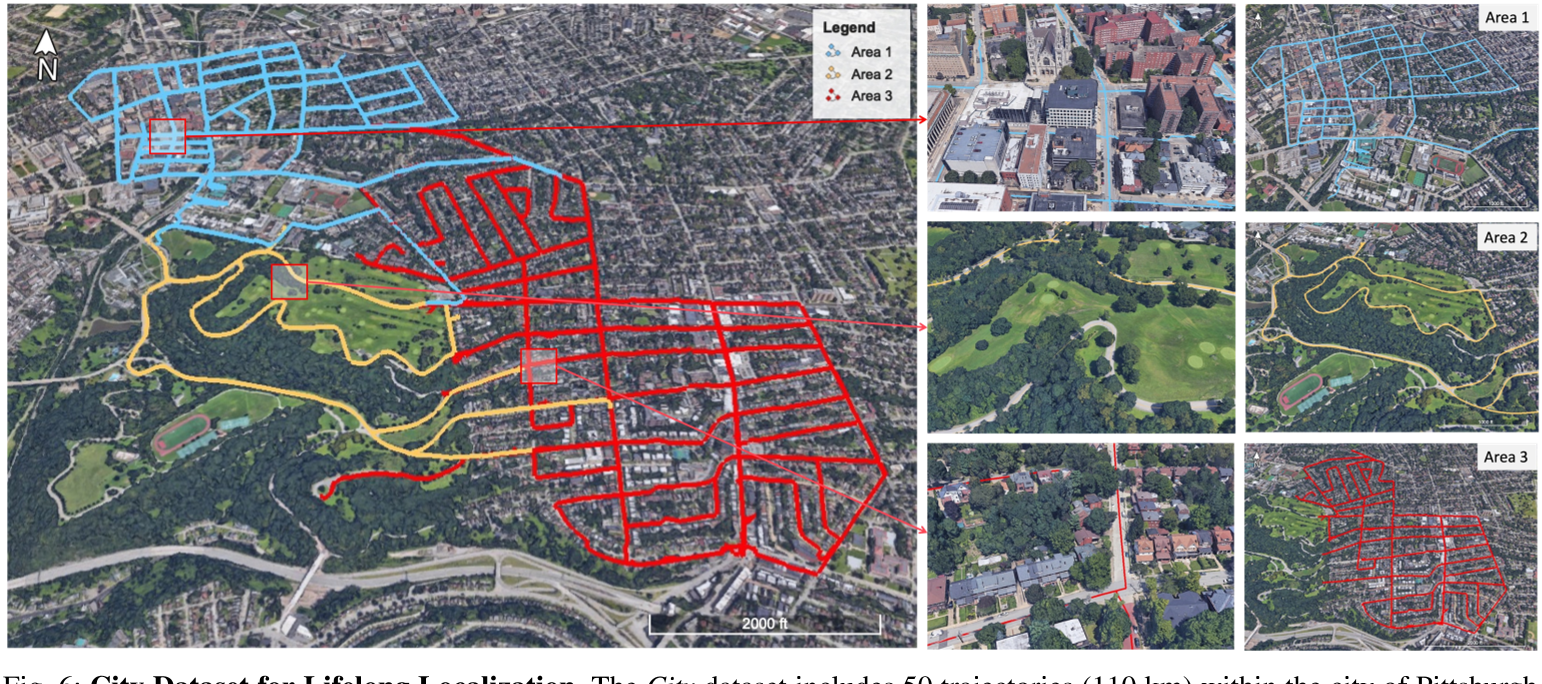
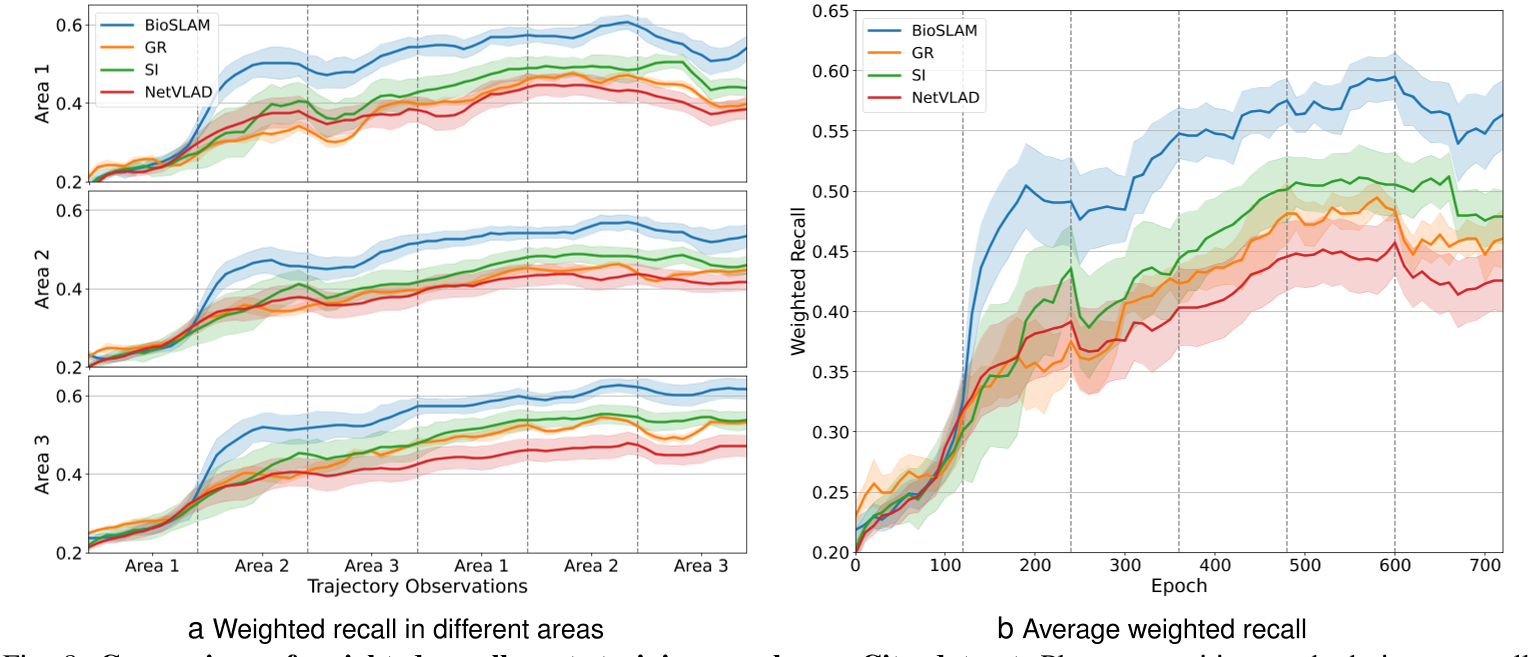
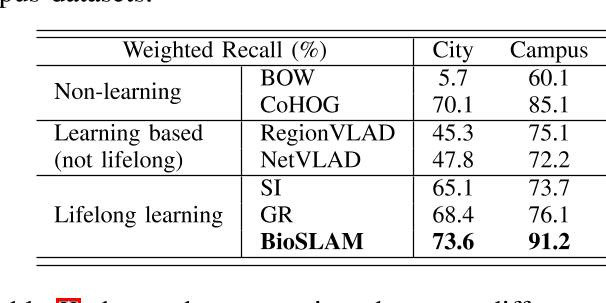
我们提出了BioSLAM,这是一个lifelong的SLAM框架,用于增量地学习各种新现象,并对以前访问过的地区的准确位置识别。与人类不同,人工神经网络会遭受遗忘,当与新来者一起训练时,可能会忘记之前访问过的区域。对于人类来说,研究人员发现,大脑中存在一种记忆回放机制,使神经元对之前的事件保持活跃。受到这一发现的启发,BioSLAM根据反馈奖励来控制机器人的学习行为。具体来说,BioSLAM提供了一种新颖的双记忆机制来维护:1)动态记忆来有效地学习新的观察结果,2)静态记忆来平衡新的旧知识。当与基于视觉/激光雷达的SLAM系统相结合时,完整的处理流程可以帮助agent增量更新位置识别能力,对长期位置识别日益复杂的情况具有鲁棒性。我们在两个增量SLAM场景中提出了BioSLAM。在第一种场景中,基于激光雷达的智能体以120公里的轨迹在城市规模的环境中持续穿行,并遇到不同类型的3D几何图形(开放街道、居民区、商业建筑)。我们表明,Bioslam可以逐步更新代理的位置识别能力。在第二种方案中,一个基于激光视觉的智能体以4.5公里的轨迹反复穿过校园规模的区域。Bioslam可以保证不同外观下的位置识别精度优于现有方法的15%。据我们所知,BioSLAM是首个记忆增强的lifelong SLAM系统,可以帮助长期导航任务中的增量位置识别。
以上内容来自从零开始机器人SLAM知识星球 每日更新内容

 浙公网安备 33010602011771号
浙公网安备 33010602011771号