基于mykernel 2.0编写一个操作系统内核
实验目的
- 配置mykernel 2.0,熟悉Linux内核的编译
- 基于mykernel 2.0编写一个建议的操作系统内核,实现进程管理的相关核心功能。
- 对操作系统内核核心功能及运行工作机制进行学习
实验环境
实验采用阿里云主机,操作系统为centos
实验内容
1.编译Linux内核
实验步骤如下:(与ubunto不同,centos主要通过yum和tar包安装,在相关依赖安装的时候建议挨个查询安装方法)
wget https://raw.github.com/mengning/mykernel/master/mykernel-2.0_for_linux-5.4.34.patch sudo apt install axel axel -n 20 https://mirrors.edge.kernel.org/pub/linux/kernel/v5.x/linux-5.4.34.tar.xz
xz -d linux-5.4.34.tar.xz tar -xvf linux-5.4.34.tar cd linux-5.4.34 patch -p1 < ../mykernel-2.0_for_linux-5.4.34.patch
//安装所需要的依赖 yum install bison flex //https://blog.51cto.com/sf1314/2112529 yum install ncurses-devel yum install openssl-devel yum install elfutils-libelf-devel make defconfig make -j4 //安装qemu qemu-system-x86_64 -curses -kernel arch/x86/boot/bzImage
最终将内核编译,编译成功
然后使用qemu启动内核,一个简单的my_start_kernel在执行,同时my_timer_handler时钟中断处理程序周期性执行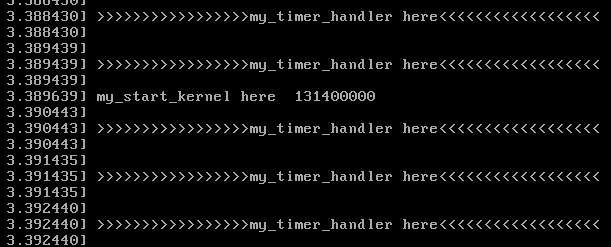
以上执行结果,是因为在mykernel文件夹下面,可以看到mymain.c 和 myinterrupt.c连个文件。在my_start_kernel里面程序循环打印"my_start_kernel here %d \n",然后mykernel能够周期性的产生时钟中断,中断处理程序就会调用my_timer_handler函数,此时就会打印"\n>>>>>>>>>>>>>>>>>my_timer_handler here<<<<<<<<<<<<<<<<<<\n\n"。
那么我们如何自己实现进程调度的功能呢?
经过上述分析,我们可以重新编写my_start_kernel以及my_timer_handler等处理近进程的调度和中断。
2.实现自己的内核进程调度功能
参照https://github.com/mengning/mykernel 提供的范例代码
在mykernel下,增加一个mypcb.h的头文件,用来定义PCB(在linux内核中是tast_struct结构体)
在mykernel下,增加一个mypcb.h的头文件,用来定义PCB(在linux内核中是tast_struct结构体)
/* * linux/mykernel/mypcb.h */ //最大的任务数 #define MAX_TASK_NUM 4 #define KERNEL_STACK_SIZE 1024*8
/* CPU-specific state of this task */ struct Thread { unsigned long ip; // 进程ip unsigned long sp; // 栈顶指针sp }; typedef struct PCB{ int pid; /* 进程号 */ volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */ unsigned long stack[KERNEL_STACK_SIZE]; /* 进程堆栈 */ /* CPU-specific state of this task */ struct Thread thread; unsigned long task_entry; /* 进程代码入口 */ struct PCB *next; /* 指向下一个PCB */ }tPCB;
//调度函数 void my_schedule(void);
修改mymain.c,这里是mykernel内核代码的入口,负责初始化内核的各个组成部分。
在mymain.c中添加一个my_process函数,用来作为一个进程的代码模拟一个进程。通过判断my_need_sched的值,来确定是否需要调度。当时间片耗尽,会主动调用一个my_schedule()的函数,来实现进程调度。my_timer_handler用来记录时间片()
具体的各个函数的实现如下所示:
#include "mypcb.h" tPCB task[MAX_TASK_NUM]; tPCB * my_current_task = NULL; volatile int my_need_sched = 0; void my_process(void); void __init my_start_kernel(void)
{ int pid = 0; int i; /* Initialize process 0*/ task[pid].pid = pid; task[pid].state = 0;/* -1 unrunnable, 0 runnable, >0 stopped */ task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process; task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1]; task[pid].next = &task[pid]; /*fork more process */ for(i=1;i<MAX_TASK_NUM;i++) { memcpy(&task[i],&task[0],sizeof(tPCB)); task[i].pid = i; task[i].thread.sp = (unsigned long)(&task[i].stack[KERNEL_STACK_SIZE-1]); task[i].next = task[i-1].next; task[i-1].next = &task[i]; } /* start process 0 by task[0] */ pid = 0; my_current_task = &task[pid]; asm volatile( "movq %1,%%rsp\n\t" /* 将RSP寄存器指向进程0的堆栈栈底,task[pid].thread.sp初始值即为进程0的堆栈栈底 */ "pushq %1\n\t" /* push rbp,将当前RBP寄存器值压栈 */ "pushq %0\n\t" /* push task[pid].thread.ip,将当前进程的RIP(这里是初始化的值my_process(void)函数的位置)压栈 */ "ret\n\t" /* ret 将栈顶位置的task[0].thread.ip,也就是my_process(void)函数的地址放入RIP寄存器中,相应的RSP寄存器指向的位置也发生了变化 */ : : "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/ ); }
void my_process(void) { int i = 0; while(1) { i++; if(i%10000000 == 0) { printk(KERN_NOTICE "this is process %d -\n",my_current_task->pid); if(my_need_sched == 1) { my_need_sched = 0; my_schedule(); } printk(KERN_NOTICE "this is process %d +\n",my_current_task->pid); } } }
my_schedule代码如下
#include "mypcb.h" extern tPCB task[MAX_TASK_NUM]; extern tPCB * my_current_task; extern volatile int my_need_sched; volatile int time_count = 0; /* * Called by timer interrupt. */ void my_timer_handler(void) { if(time_count%1000 == 0 && my_need_sched != 1) { printk(KERN_NOTICE ">>>my_timer_handler here<<<\n"); my_need_sched = 1; } time_count ++ ; return; } void my_schedule(void) { tPCB * next; tPCB * prev; if(my_current_task == NULL || my_current_task->next == NULL) { return; } printk(KERN_NOTICE ">>>my_schedule<<<\n"); /* schedule */ next = my_current_task->next; prev = my_current_task; if(next->state == 0)/* -1 unrunnable, 0 runnable, >0 stopped */ { my_current_task = next; printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid); /* switch to next process */ asm volatile( "pushq %%rbp\n\t" /* save rbp of prev */ "movq %%rsp,%0\n\t" /* save rsp of prev */ "movq %2,%%rsp\n\t" /* restore rsp of next */ "movq $1f,%1\n\t" /* save rip of prev */ "pushq %3\n\t" "ret\n\t" /* restore rip of next */ "1:\t" /* next process start here */ "popq %%rbp\n\t" : "=m" (prev->thread.sp),"=m" (prev->thread.ip) : "m" (next->thread.sp),"m" (next->thread.ip) ); } return; }
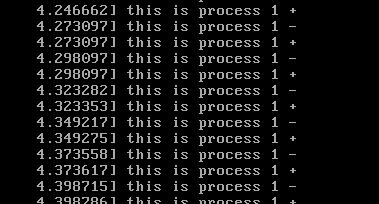
重新编译后:
实验总结
基于mykernel2.0实现了简单的进程切换、进程的管理、中断机制的核心功能。了解了内核工作的相关操作。
操作系统内核运行机制实际上就是通过中断和进程切换来实现多任务处理。在进程的执行过程中,当时间片用完或者发生进程调度时,需要先保存当前进程的上下文环境,该进程被再次调用时,恢复PCB中保存的进程上下文环境,这样就实现了多道程序在一个CPU并发执行。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号