Cygwin工具编译Ardupilot方法
注意:该编译方法生成的固件基于Chibios系统,如果想要Nuttx系统固件,需采用make编译,步骤见make编译说明部分。
软件安装准备
-
安装Cygwin
-
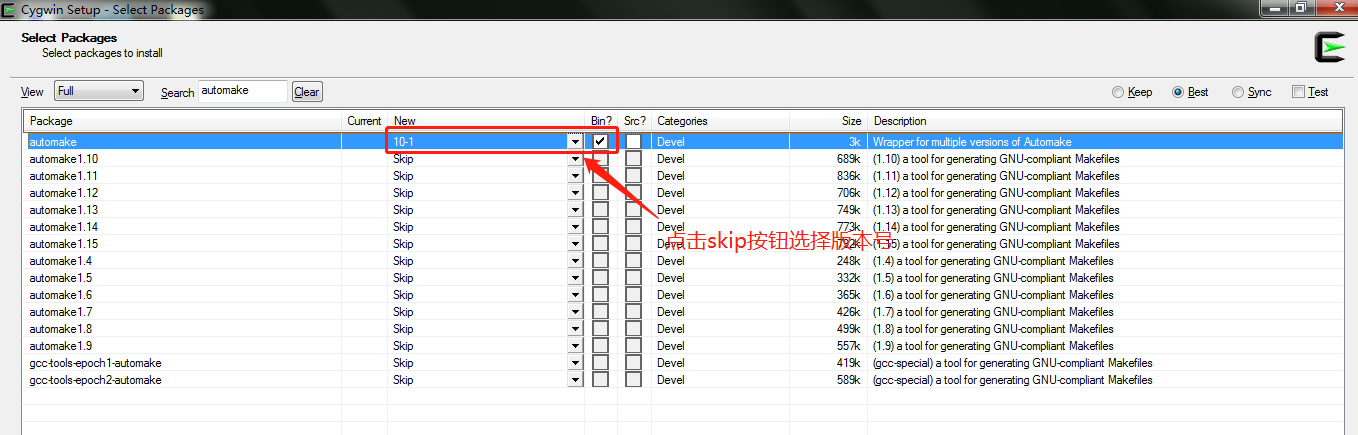
安装应用程序,在安装界面中选择网络安装和下载包服务器地址,直到进入下图界面
![]()
-
在搜索框中搜索待安装的包,并点击skip按钮选择安装版本,选择成功后bin选择被打钩,表示选择安装有效。依次搜索下表中的包,并选择安装有效。全被选择完成之后,点击下一步进行安装(下载包和安装包过程需要一段比较长的时间,需耐心等待)。
![]()
Package Name Category / Name / Description autoconf Devel | autoconf: Wrapper scripts for autoconf commands automake Devel | automake: Wrapper scripts for automake and aclocal ccache Devel | ccache: A C compiler cache for improving recompilation gcc-g++ Devel | gcc-g++ GNU Compiler Collection (C++) git Devel | git: Distributed version control system libtool Devel | libtool: Generic library support script make Devel | make: The GNU version of the ‘make’ utility gawk Interpreters | gawk: GNU awk, a pattern scanning and processing language libexpat-devel Libs | libexpat-devel: Expat XML parser library (development files) libxml2-devel Libs | libxml2-devel: Gnome XML library (development) libxslt-devel Libs | libxslt-devel: XML template library (development files) python2-devel Python | python2-devel: Python2 language interpreter (python3 does not work yet) python2-future Python | python2-future: Clean single-source support for Python 3 and 2 python2-libxml2 Python | python2-libxml2: Gnome XML Library (Python bindings python2-pip Python | python2-pip: Python package installation tool procps-ng System | procps-ng: System and process monitoring utilities (required for pkill) gdb Devel | gdb: The GNU Debugger ddd Devel | ddd: DDD, the data display debugger zip Archive | zip: Info-ZIP compression utility -
打开Cygwin64 Terminal(从桌面快捷方式或者开始菜单中打开),输入以下指令安装依赖的python组件包。
pip2 install empy pip2 install pyserial pip2 install pymavlink

-
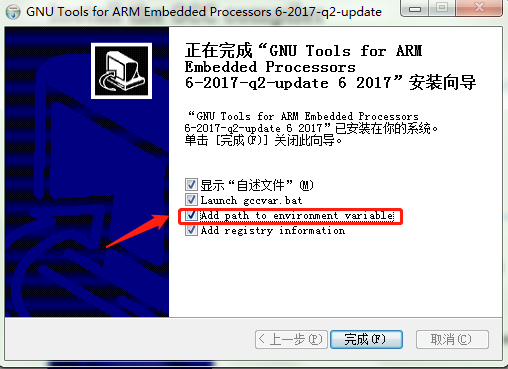
安装GCC编译器(http://firmware.ardupilot.org/Tools/STM32-tools/gcc-arm-none-eabi-6-2017-q2-update-win32-sha2.exe),安装过程中选择Add path to environment variable。
编译目标程序
-
打开Cygwin64 Terminal,进入Ardupilot工程目录下
-
查看能编译目标板指令
./waf list_boards

-
配置目标板,以下列出常用的配置目标板指令:
./waf configure --board bebop --static # Bebop or Bebop2 ./waf configure --board edge # emlid edge ./waf configure --board fmuv3 # Pixhawk2/Cube using ChibiOS ./waf configure --board fmuv4 # Pixracer using ChibiOS ./waf configure --board navio2 # emlid navio2 ./waf configure --board Pixhawk1 # Pixhawk1 ./waf configure --board CubeBlack # Pixhawk2 ./waf configure --board Pixracer # Pixracer ./waf configure --board skyviper-v2450 # SkyRocket's SkyViper GPS drone using ChibiOS ./waf configure --board sitl # software-in-the-loop simulator ./waf configure --board sitl --debug # software-in-the-loop simulator with debug symbols
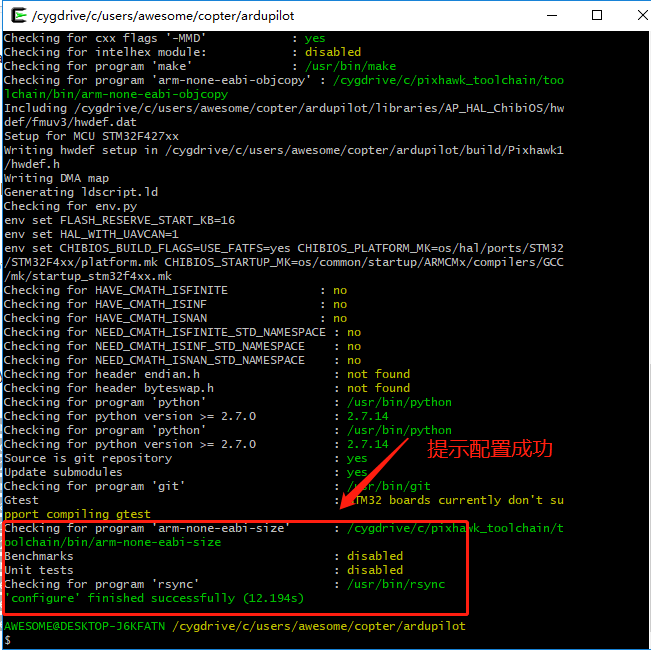
此处编译pixhawk1为例。输入指令
./waf configure --board Pixhawk1。注意区分大小写。![]()
-
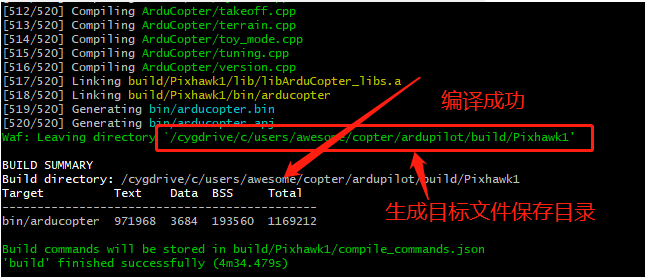
编译目标指令。输入以下指令编译四旋翼固件,固件格式为apj和bin,其中apj可通过MissionPlaner地面站烧写至目标板。
./waf --targets bin/arducopter![]()
关于waf编译详细说明请见文档:https://github.com/ArduPilot/ardupilot/blob/master/BUILD.md

 浙公网安备 33010602011771号
浙公网安备 33010602011771号