论文信息
论文标题:Structural Entropy Guided Graph Hierarchical Pooling
论文作者:Junran Wu, Xueyuan Chen, Ke Xu, Shangzhe Li
论文来源:2022,ICLR
论文地址:download
论文代码:download
1 Introduction
之前池化的方法大多是 固定比例的池化 或者 基于逐步池化设计的。本文针对上述问题,设计了 SEP 模型,具体来说,在不分配特定于层的压缩配额的情况下,设计了一种全局优化算法来一次生成针对池化的簇分配矩阵。
然后,本文举例说明了以往的方法在重建环图和网格合成图中的局部结构损伤。除 SEP 外,还进一步设计了两个分类模型,SEP-G 和 SEP-N,分别用于图分类和节点分类。结果表明,SEP 在图分类基准上优于最先进的图池方法,并在节点分类上获得了更好的性能。
池化有两种代表性的工作:
-
- 基于节点丢弃的池化策略:TopKPool、SAGPool、ASAP
-
- 基于节点聚类的层次池化:DiffPool
本文贡献:
-
- 我们在以往的分层池工作中发现了阻碍 GNN 发展的两个关键问题,包括由于固定的压缩配额和逐步池设计而造成的局部结构损伤和次优问题。
- 通过引入结构信息理论,我们提出了一种新的分层池化方法,称为SEP,以解决所揭示的问题。
- 我们在图重建、图分类和节点分类任务上广泛地验证了SEP,与SOTA分层池化方法相比,它们的性能更好。
2 Proposed Method
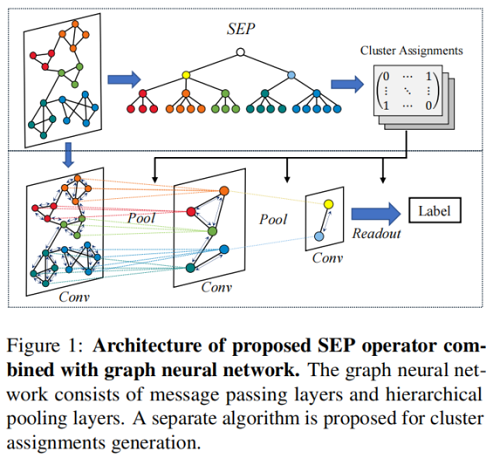
整体框架图示:
2.1 Preliminaries
-
- 代表第 层的邻接矩阵;
- 代表第 层由 GNN 导出的特征矩阵;
- 接收节点隐藏特征 并合并这些特征,以改进新图中 簇的初始表示;
2.2 Cluster Assignments via Structural Entropy Minimization
结构熵用来解码图的层次结构,通过结构熵最小化,可以将图的层次结构解码为相应的编码树,使噪声或随机变化产生的干扰最小化。本文认为一种有效的结构熵最小化算法可以揭示层次池化层之间的联系,并消除图中的噪声结构。
编码树 上 的结构熵的形式化方程可以写为:
其中,
-
- 是编码树 的一个非根节点,同时可以被认为是一个根据编码树 划分的节点子集 ;
- 是 的父节点;
- 是指在 的叶节点划分中具有端点的边数;
- 代表 中的叶子节点度的和;
- 代表 节点度;
编码树是图的一种自然的层次划分,为了使结构熵最小化 ,本文建立了不同层之间的连接。此外,图中的局部结构将被保留,因为不需要分配图层中特定的节点压缩配额。
首选具有一定高度的自然编码树,因为大多数任务只需要几次固定时间的图粗化。在此背景下,提出了 的 维结构熵来解码具有固定高度 的最优编码树:
本文在 维结构熵的指导下,研究了对具有一定高度 的编码树进行解密的求解方法。首先,我们定义了三个函数。
Definition 3.1. Let T be any coding tree for graph , is the root node of and are the leaf nodes of . Given any two nodes in , in which .children and .children.
Define a function for to insert a new node between and :
Definition 3.2. Following the setting in Definition 3.1, given any two nodes , in which .
Define a function for to remove from and merge to :
Definition 3.3. Following the setting in Definition 3.1, given any two nodes , in which and .
Define a function for to insert a new node between and :
使用上述 3 个 Definition 构造一个 高度为 的编码树:
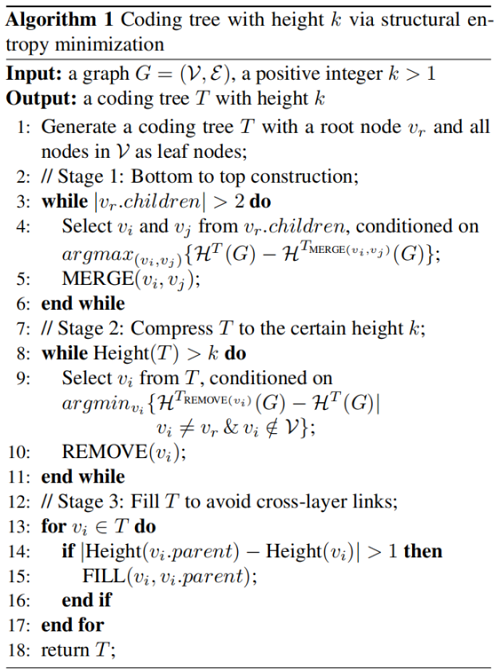
Stage 1: Bottom to top construction —— 从上到下 构造一棵二进制编码树,将根的两个节点和并乘一个新的划分,最大限度的减少结构熵;
Stage 2: Compress to the certain height —— 为满足固定数量的图粗化,需要通过删除节点来压缩之前的全高二进制编码树。每次从 中选择一个内部节点,这使得 在去除该节点后的结构熵变化最小。
Stage 3: Fill T to avoid cross-layer links —— 在第二阶段结束时,已经在结构熵的指导下得到了一个一定高度为 的编码树。但是,由于跨层链接,节点在下一层中没有直接后继,这将导致在基于这种编码树实现分层池时节点丢失。因此,我们需要执行第三个阶段,以确保层间信息传输的完整性,也不需要干扰 在编码树 上的结构熵。
最终, 的编码树 被获得,其中 , 和。此外,从 中也可以得到簇分配矩阵,即 。
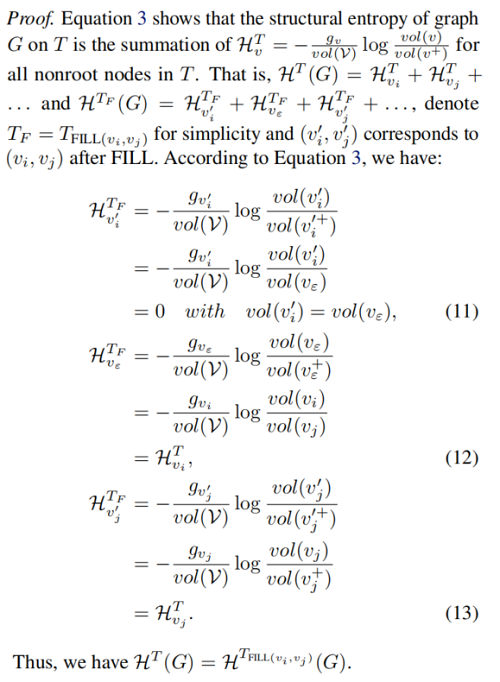
Proposition 3.4. Let T be a coding tree after the second stage of Algorithm 1, and given two adjacent nodes , in which and . Then, .
Proof:
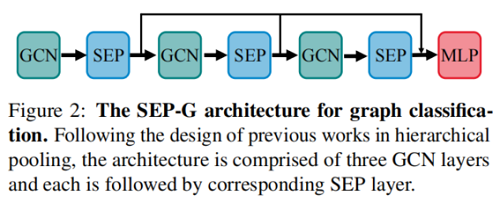
2.3 Graph Neural Network for Graph Classification
图分类框架如下:
图表示如下:
Proposition 3.5. Given a permutation matrix , then (i.e., SEP is permutation invariant).
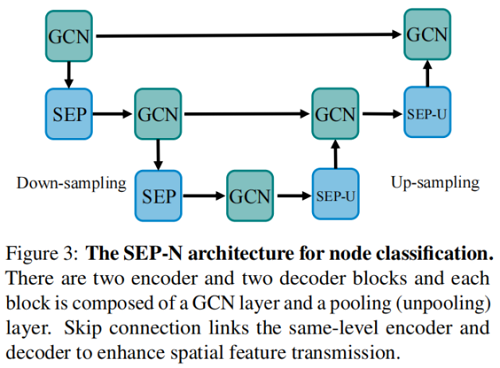
2.4 Graph Neural Network for Node Classification
节点分类框架如下:
除了将图转换为高级表示的功能外,我们还可以采用相同的矩阵 来展开压缩图表示 ,并将 结构到原始空间:
3 Experiments
3.1 Graph Reconstruction
Confifiguration
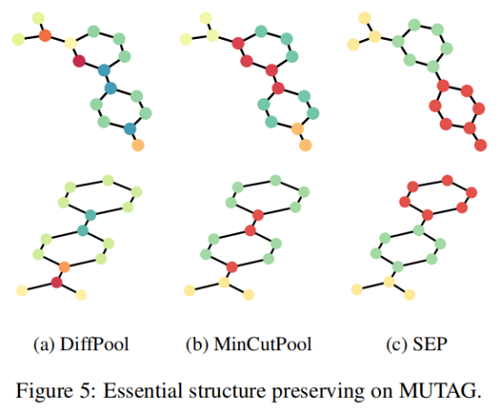
Figure 4 展示了使用原始图和使用不同池化方法重构的图:

我们选择 TopKPool 来表示节点丢弃设计的方法,选择 MinCutPool 来表示节点聚类设计的方法。我们首先注意到 TopKPool 的重建结果,其中原始图的基本形状甚至无法识别。这证实了节点下降方法会导致严重的信息缺失,并意味着节点下降方法在图分类中的性能较差。另一方面,MinCutPool 确实保留了原始图形的基本形状。但是,我们仍然可以看到环的边缘和网格中心的显著扭曲,这代表了环和网格的关键结构,这验证了图中的局部结构会被人为指定的节点压缩配额破坏的假设。相反地,SEP 几乎重建了环,并保留了网格中心的基本结构,这表明我们的池化方法获得了原始图的关键结构信息。
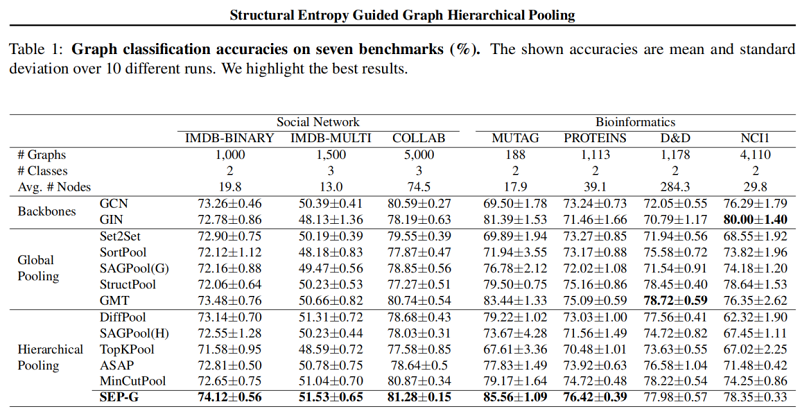
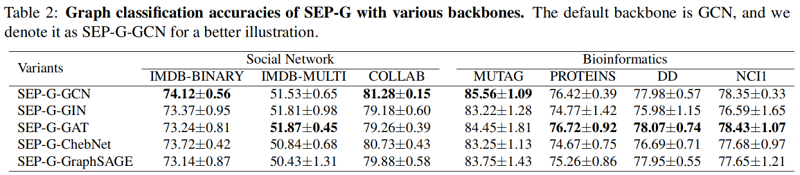
3.2 Graph Classifification
图分类结果:
聚类可视化
3.3 Node Classification
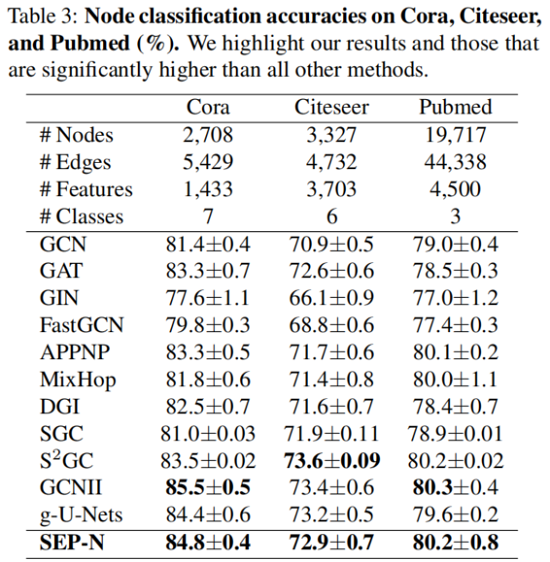
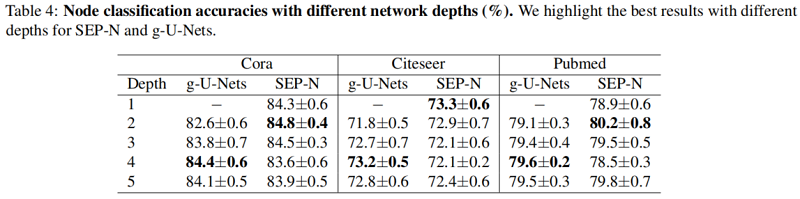
4 Conclusions
在本文中,我们开发了一个优化算法来解决现有的分层池方法的几个局限性。特别是,在结构熵最小化的指导下,我们的池化方法SEP不仅可以捕获池化层之间的连通性,而且还可以解决由于节点压缩的超参数而导致的局部结构破坏的问题。在提出的SEP基础上,我们引入了两种学习模型,SEP-G和SEP-n,分别用于图分类和节点分类。实验结果表明,SEP-G在图分类方面取得了显著的改进,并且SEP-N在节点分类任务上取得了优于其他gnn的性能。结构熵和节点特征的结合是未来工作的一个有趣的方向。
因上求缘,果上努力~~~~ 作者:别关注我了,私信我吧,转载请注明原文链接:https://www.cnblogs.com/BlairGrowing/p/16588389.html


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· ollama系列1:轻松3步本地部署deepseek,普通电脑可用
· 按钮权限的设计及实现
· 【杂谈】分布式事务——高大上的无用知识?
2020-08-16 剑指 Offer 30. 包含min函数的栈