论文解读(Cluster-GCN)《Cluster-GCN: An Efficient Algorithm for Training Deep and Large Graph Convolutional Networks》
论文信息
论文标题:Cluster-GCN: An Efficient Algorithm for Training Deep and Large Graph Convolutional Networks
论文作者:Wei-Lin Chiang, Xuanqing Liu, Si Si, Yang Li, Samy Bengio, Cho-Jui Hsieh
论文来源:2019, KDD
论文地址:download
论文代码:download
1 Introduction
现有 GCN 训练方法存在的问题:
-
- Memory requirement
- Time per epoch
- Convergence speed
几种 GCN 类型:
- GCN:Full-batch gradient descent
- 需要计算整个所有节点的梯度,也需要存储所有 Embedding ,所以导致 $O(NFL)$ 内存需求;
- 在每个 epoch 只更新一次参数,所以 SGD 的收敛速度缓慢;
- memory: bad
- time per epoch: good
- convergence: bad
-
Mini-batch SGD
- 每次更新只基于一个 mini-batch 的梯度,它可以减少内存需求,并在每个 epoch 执行多次更新,从而加快收敛速度;
- 但是,由于邻居扩展问题,mini-batch SGD 在计算 $L$ 层单个节点的损失时引入了大量的计算开销。它要求节点的邻居节点在 $L-1$ 层的 embeddings,这又要求邻居节点在 $L-2$ 层的 embeddings,和在下游层的递归 embeddings。这将导致时间复杂度随 GCN 深度呈指数增长;
- 尽管 GraphSAGE 提出了通过在层的反向传播过程中,使用固定大小的邻居样本;FastGCN 提出了重要性抽样,但这些方法的开销仍然很大,并且在 GCN 深层会变得更糟;
- memory: good
- time per epoch: bad
- convergence: good
- VR-GCN
- 采用 variance 减少技术来减小邻域采样节点的大小;
- 尽管成功地减小了采样大小,但它需要将所有节点的所有中间的 embeddings 存储在内存中,从而导致 $O(NFL)$ 内存需求;
- 如果图形中的节点数量增加到数百万个,那么对于 VR-GCN 的内存需求可能太高,无法适应 GPU ;
- memory: bad ;
- time per epoch: good ;
- convergence: good;
2 Method
2.1 Vanilla Cluster-GCN
对于图 $G$ ,把它的节点划分为 $c$ 个群: $V=\left[V_{1}, \ldots, V_{c}\right]$ ,其中 $V_{t}$ 包含在第 $t$ 个群中的节点。根据这些群可以得到 $c$ 个子图:
$\bar{G}=\left[G_{1}, \ldots, G_{c}\right]=\left[V_{1}, E_{1}, \ldots, V_{c}, E_{c}\right]$
其中 $E_{t}$ 只包含 $V_{t}$ 中的节点之间的边。
同样,邻接矩阵会被划分为 $c^{2}$ 个子矩阵 (只需重新排列一下节点的位置) :
$A=\bar{A}+\Delta=\left[\begin{array}{ccc}A_{11} & \cdots & A_{1 c} \\\vdots & \ddots & \vdots \\A_{c 1} & \cdots & A_{c c}\end{array}\right]$
其中,
$\bar{A}=\left[\begin{array}{ccc}A_{11} & \cdots & 0 \\\vdots & \ddots & \vdots \\0 & \cdots & A_{c c}\end{array}\right], \Delta=\left[\begin{array}{ccc}0 & \cdots & A_{1 c} \\\vdots & \ddots & \vdots \\A_{c 1} & \cdots & 0\end{array}\right]$
$A_{t t}$ 表示子图 $G_{t}$ 的邻接矩阵, $A_{s t}$ 表示节点 $V_{s}$ 和节点 $V_{t}$ 之间的边构成的邻接矩阵。特征和标签数据也可以根据群的划分进行相应的划分: $\left[X_{1}, \cdots, X_{c}\right] $ 和 $ \left[Y_{1}, \cdots, Y_{c}\right]$ 。
用 $\bar{A}^{\prime}$ 表示矩阵 $A$ 的标准化后的结果,那么整个 GCN 的卷积过程可以形式化表示为:
$Z^{(L)}=\bar{A}^{\prime} \sigma\left(\bar{A}^{\prime} \sigma\left(\cdots \sigma\left(\bar{A}^{\prime} X W^{(0)}\right) W^{(1)}\right) \cdots\right) W^{(L-1)}$
即:
$\mathrm{Z}^{(L)} =\left[\begin{array}{c}\bar{A}_{11}^{\prime} \sigma\left(\bar{A}_{11}^{\prime} \sigma\left(\cdots \sigma\left(\bar{A}_{11}^{\prime} X_{1} W^{(0)}\right) W^{(1)}\right) \cdots\right) W^{(L-1)} \\\vdots \\\bar{A}_{c c}^{\prime} \sigma\left(\bar{A}_{c c}^{\prime} \sigma\left(\cdots \sigma\left(\bar{A}_{c c}^{\prime} X_{c} W^{(0)}\right) W^{(1)}\right) \cdots\right) W^{(L-1)}\end{array}\right]$
对应的损失函数如下:
$\mathcal{L}_{\bar{A}^{\prime}}=\sum\limits _{t} \frac{\left|\mathcal{V}_{t}\right|}{N} \mathcal{L}_{\bar{A}_{t t}^{\prime}} \quad\quad\text { and }\quad \quad\mathcal{L}_{\bar{A}_{t t}^{\prime}}=\frac{1}{\left|\mathcal{V}_{t}\right|} \sum\limits_{i \in \mathcal{V}_{t}} \operatorname{loss}\left(y_{i}, z_{i}^{(L)}\right)$
在每一步中,对一个 $V_{t}$ 进行采样,然后根据块损失函数的梯度进行 SGD 更新,这只需要当前 batch 上的子图 $A_{t t}$, $X_{t}$, $Y_{t}$ 和模型 $\left\{W^{(l)}\right\}_{l}^{L}$ 。实现只需要矩阵乘积的正向和反向传播,这比以前基于 SGD 的训练方法中使用的邻域搜索过程更容易实现。
利用图的聚类算法对图进行划分,像 Metis[8] 和 Graclus[4] 这样的,目的是在图中的顶点上构造分区,使簇内的边比簇间的边接更多,从而更好地捕获图的聚类和社区结构。
划分簇的意义在于:
- 对于每个 batch 而言,Embedding utilization 相当于簇内的连接。每个节点及其相邻节点通常位于同一簇内,因此经过几次后跳跃后,邻接节点大概率还是在簇内;
- 由于使用 $\bar{A}$ 代替 $A$ ,误差与簇间的的连接 $\Delta$ 成正比,所以需要使得簇间的连接数量尽可能少。
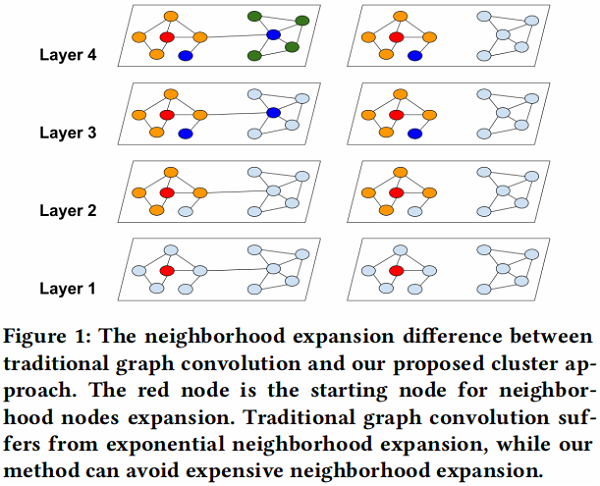
在 Figure 1 中,我们用全图G说明邻域展开,用聚类划分 $\bar{G} $ 说明图。我们可以看到,Cluster-GCN 可以避免大量的邻域搜索,并关注每个集群内的邻居。
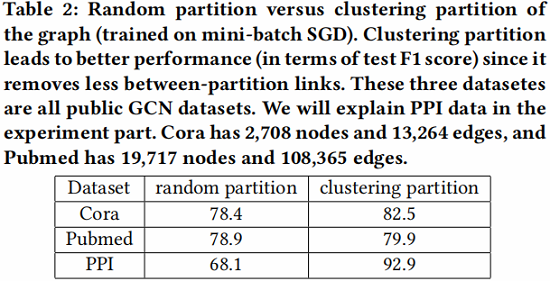
在 Table 2 中,我们展示了两种不同的节点划分策略:随机划分 和 聚类方法划分。我们使用随机划分和 METIS 将图分成10个部分。然后使用一个划分分区作为批处理来执行SGD更新。我们可以看到,在相同数量的 epoch 下,使用聚类划分可以获得更高的精度。这表明使用图聚类是很重要的,分区不应该随机形成。
时间和空间复杂度计算如 Table 1 所示:

2.2 Stochastic Multiple Partitions
虽然普通的 Cluster-GCN 实现了良好的计算和内存复杂度,但仍然有两个潜在的问题:
-
- 在图被分区后,Cluster 之间的连接将被删除。因此,性能可能会受到影响;
- 图的聚类算法往往会将相似的节点聚集在一起。因此,集群的分布可能与原始数据集不同,从而导致在执行SGD更新时对全梯度的有偏估计;
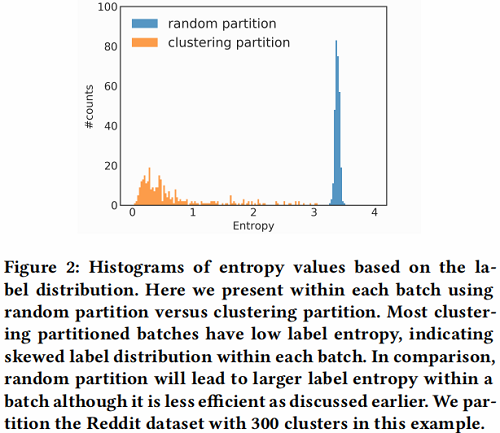
下图为 Reddit 数据集中标签分布不平衡的案例,通过每个簇的标签分布计算其熵值,与随机分割相比,可以清楚的看到聚类分区的簇的熵较小,这表明簇的标签分布偏向于某些特征的标签,所以这会增加不同 batch 的梯度更新的差异,并影响 SGD 的收敛性。
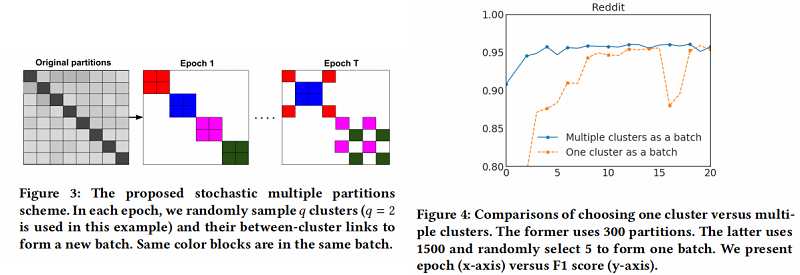
为了解决上述问题,文中提出了一种 Stochastic Multiple Partitions,在簇接之间进行合并,并减少 batch 间的差异(variance) 。作者首先用一个较大 的 $p$ 把图分割成 $ p$ 个划分分区 $V_{1}, \ldots, V_{p}$ ,然后对于 SGD 的更新重新构建一个 batch $B$,而不是只考虑一个分区。随机地选择 $q$ 个分区,定义为 $t_{1}, \ldots, t_{q} $, 并把它们的节点 $V_{t 1} \cup \ldots \cup V_{t} $ 包含到这个batch $B$ 中。此外,在选择的分区之间的连接
$A_{i j} \mid i, j \in t_{1}, \ldots, t_{q}$
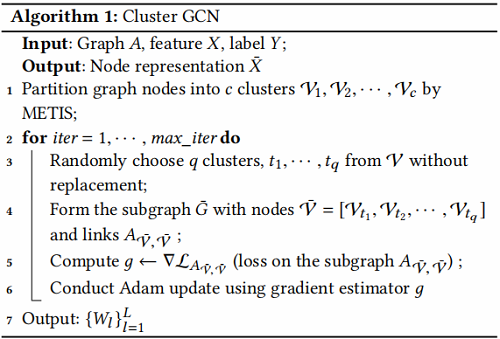
被添加回去。通过这种方式,在簇之间的连接就会被重新合并。这种簇的组合使 batch 之间的差异(variance)更小。图3说明了每个epoch随机选中不同的簇组合成为一个batch。作者在Reddit数据集上进行了一个实验,证明了该方法的有效性。在图4中,可以观察到使用多个簇作为一个batch可以提高收敛性。最后的Cluster-GCN算法在算法1中给出。
算法流程:
2.3 Deep GNN network
考虑使用深层次 GNN 框架:
在[9]中,它们采用了一种类似于残差连接[6]的技术,使模型能够将信息从前一层传输到下一层。具体来说,将第 $l$ 层的隐藏表示添加到下一层中。
$X^{(l+1)}=\sigma\left(A^{\prime} X^{(l)} W^{(l)}\right)+X^{(l)}$
虽然上式似乎是合理的,但无论相邻节点的数量如何,对所有节点使用相同的权重可能是不合适的。此外,当使用更多的层时,数值可能会呈指数增长,这可能会导致数值不稳定。
因此,作者提出了上式的修改版本,以更好地维护邻居信息和数值范围。文中也首先向原始 $A$ 添加一个单位矩阵(identity),然后执行标准化(normalization):
$\tilde{A}=(D+I)^{-1}(A+I)$
然后考虑
$X^{(l+1)}=\sigma\left((\tilde{A}+\lambda \operatorname{diag}(\tilde{A})) X^{(l)} W^{(l)}\right)$
采用的“对角增强”技术的实验结果,我们表明这种新的归一化策略可以帮助构建深度GCN和实现SOTA性能。
3 Experiment
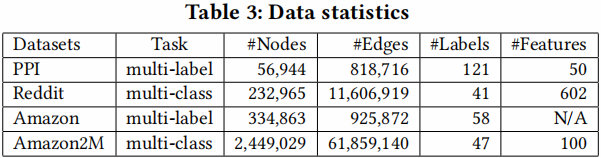
数据集
3.1 Training Performance for median size datasets
Training Time vs Accuracy
首先,在训练速度方面,作者将所提出的方法与其他方法进行了比较。在图6中,x轴显示了以秒为单位的训练时间,y轴显示了验证集的准确性(F1分数)。作者用2、3、4层GCN绘制了三个数据集的训练时间与准确度的关系图。由于GraphSAGE比VRGCN比文中的方法慢,GraphSAGE的曲线只出现在PPI和Reddit数据集中。可以看到,对于不同层数的GCNs,文中的方法对于PPI和Reddit数据集都是最快的。
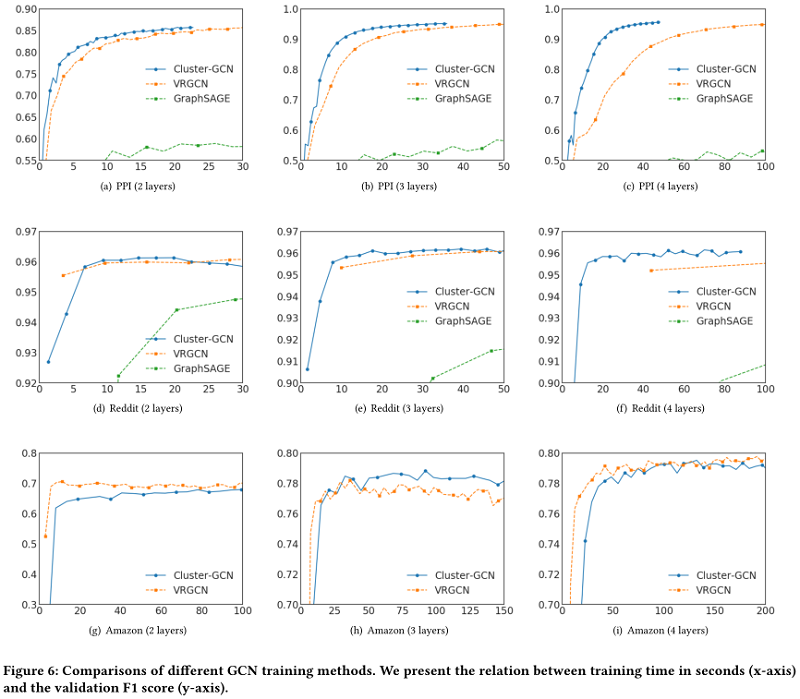
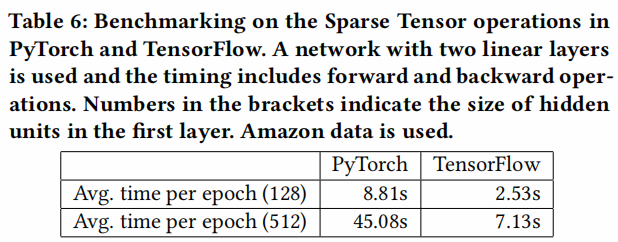
对于Amazon数据,由于节点的特征不可用,所以使用一个单位矩阵作为特征矩阵 $X$。在此设置下,参数矩阵 $W^{0}$ 的形状为 334863x128。因此,计算主要是由稀疏矩阵运算带来的,如$AW^{0}$ 。对于三层的情况,文中的方法仍然比VRGCN快,但是对于两层和四层的情况就慢了。原因可能是不同框架的稀疏矩阵运算速度不同。VRGCN是在TensorFlow中实现的,而Cluster-GCN是在PyTorch中实现的,它的稀疏张量支持仍然处于非常早期的阶段。在 Table 6 中,展示了TensorFlow和PyTorch对Amazon数据进行前馈/反向传播操作的时间,并使用一个简单的两层网络对这两个框架进行基准测试。可以清楚地看到TensorFlow比PyTorch快。当隐藏单元的数量增加时,这种差异更为显著。这也许可以解释为什么Cluster-GCN在Amazon dataset中有更长的训练时间。
Memory usage comparison
对于大规模的GCNs的训练,除了训练时间外,训练所需的内存使用往往更为重要,直接限制了可扩展性。内存的使用包括许多epochs训练GCN所需的内存。正如在第3节中讨论的,为了加速训练,VRGCN需要在训练期间保存历史embeddings,因此它需要比Cluster-GCN更多的内存来进行训练。由于指数邻域增长的问题,Graph-SAGE对内存的要求也高于Cluster-GCN。在表5中,比较了不同层的GCN与VRGCN的内存使用情况。当增加层数时,Cluster-GCN的内存使用量并没有增加很多,原因是增加一层时引入的额外变量是权矩阵 $W^{L}$ ,与子图和节点特征相比,权重矩阵$W^{L}$ 相对较小。而VRGCN需要保存每一层的历史embeddings,而embeddings通常是密集的,很快就会控制内存的使用。从表5可以看出,Cluster-GCN的内存效率比VRGCN高得多。例如,在Reddit数据上,要训练一个4层的隐藏维度为512的GCN,VRGCN需要2064MB内存,而Cluster-GCN只需要308MB内存。

3.2 Experimental results on Amazon2M
A new GCN dataset: Amazon2M
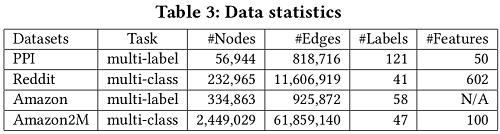
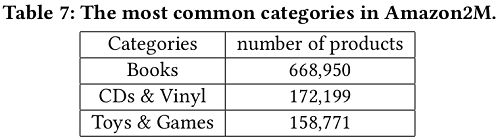
到目前为止,用于测试GCN的最大公共数据是Reddit dataset,其统计数据如 Table 3所示,其中包含大约200K个节点。如 Figure 6 所示,对该数据的GCN训练可以在几百秒内完成。为了测试GCN训练算法的可扩展性,作者基于Amazon co-purchase network构建了一个更大的图,包含超过200万个节点和6100万条边[11,12]。原始的共同购买( co-purchase)数据来自Amazon-3M。在图中,每个节点都是一个产品,图中边的连接表示是否同时购买两个产品。每个节点特征都是通过从产品描述中的bag-of-word式的特征,然后进行主成分分析[7]生成的,将维数降为100。此外,我们使用top-level categories作为该产品/节点的标签(最常见的类别见 Table 7 。数据集的详细统计数据如 Table 3 所示。
在 Table 8 中,作者比较了不同层次GCNs的VRGCN在训练时间、内存使用和测试准确度(F1分数)方面的差异。从表中可以看出
- 训练两层GCN的VRGCN比Cluster-GCN快,但是却慢于增加一层网络但实现相似准确率的Cluster-GCN
- 在内存使用方面,VRGCN比Cluster-GCN使用更多的内存(对于三层的情况5倍多)。当训练4层GCN的时候VRGCN将被耗尽,然而Cluster-GCN当增加层数的时候并不需要增加太多的内存,并且Cluster-GCN对于这个数据集训练 4 层的GCN将实现最高的准确率。

3.3 Training Deeper GCN
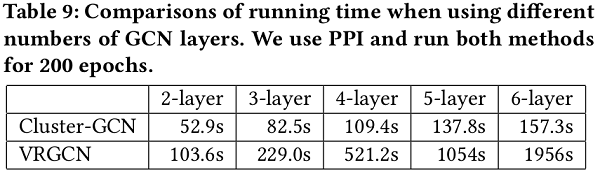
在本节中,作者考虑了具有更多层的GCNs。首先在 Table 9中显示了Cluster-GCN和VRGCN的时间比较。PPI数据集用于基准测试,实验中对这两种方法运行了200个epoch。结果发现VRGCN的运行时间由于其代价很大的邻域查找而呈指数增长,而Cluster-GCN的运行时间只呈线性增长。
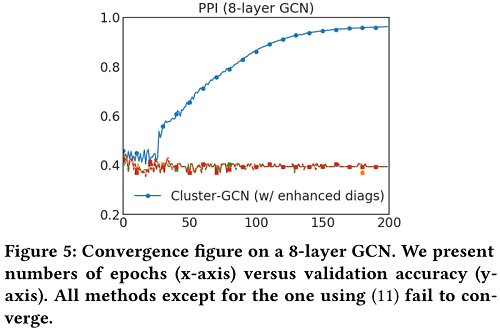
接下来作者研究了使用更深层次的GCNs是否能获得更好的精度。在3.3节,文中讨论了修改邻接矩阵A的不同策略,以方便对深度GCNs的训练。文中将对角增强技术应用于深度GCNs,并对PPI数据集进行了实验研究。结果如 Table 11 所示。对于2-5层的情况,所有方法的精度都随着层数的增加而提高,这表明更深层的GCNs可能是有用的。然而,当使用7或8个GCN层时,前三种方法无法在200个epoch内收敛,导致精度显著下降。一个可能的原因是对更深层GCNs的优化变得更加困难。文中在 Figure 5 中显示了一个8层GCN的详尽的收敛。采用所提出的对角增强技术(11),可以显著提高收敛性,达到相似的精度。

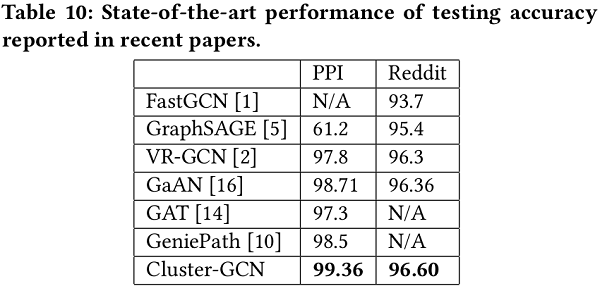
State-of-the-art results by training deeper GCNs
通过对Cluster-GCN的设计和提出的归一化方法,现在可以对GCNs进行更深入的训练,从而获得更高的精度(F1分)。文中将测试精度与表10中其他现有方法进行了比较。对于PPI数据集,Cluster-GCN可以通过训练一个包含2048个隐藏单元的5层GCN来达到最先进的效果。对于Reddit数据集,使用了一个包含128个隐藏单元的4层GCN。
4 Conclusion
基于图划分的GCN框架。
修改历史
2021-04-18 创建文章
2022-06-14 二次修订
因上求缘,果上努力~~~~ 作者:别关注我了,私信我吧,转载请注明原文链接:https://www.cnblogs.com/BlairGrowing/p/16148365.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号