机器学习——梯度下降法
1 前言
机器学习和深度学习里面都至关重要的一个环节就是优化损失函数,一个模型只有损失函数收敛到一定的值,才有可能会有好的结果,降低损失的工作就是优化方法需做的事。常用的优化方法:梯度下降法家族、牛顿法、拟牛顿法、共轭梯度法、Momentum、Nesterov Momentum、Adagrad、RMSprop、Adam等。
梯度下降法不论是在线性回归还是 Logistic 回归中,主要目的是通过迭代找到目标函数的最小值,或者收敛到最小值。
梯度下降法作为机器学习中较常使用的优化算法,其有着三种不同的形式:
- 批量梯度下降(Batch Gradient Descent)
- 随机梯度下降(Stochastic Gradient Descent)
- 小批量梯度下降(Mini-Batch Gradient Descent)
其中小批量梯度下降法也常用在深度学习中进行模型的训练。接下来,将逐步对这三种不同的梯度下降法进行理解。
为方便理解这三种梯度下降法,可以参考本博客《机器学习——批量梯度下降法、随机梯度下降法、小批量梯度下降法》
2 梯度下降算法
2.1 场景假设
梯度下降法的基本思想可以类比为一个下山的过程。
假设这样一个场景:一个人被困在山上,需要从山上找到山的最低点。但此时山上的浓雾很大,导致可视度很低;因此,下山的路径就无法确定,必须利用自己周围的信息一步一步地找到下山的路。这个时候,便可利用梯度下降算法来帮助自己下山。
怎么做呢?首先以他当前的所处的位置为基准,寻找这个位置最陡峭的地方,然后朝着下降方向走一步,然后又继续以当前位置为基准,再找最陡峭的地方,再走直到最后到达最低处。
2.2 梯度下降
梯度下降的基本过程就和下山的场景很类似。
首先,我们有一个可微分的函数,代表着一座山。目标是找到这个函数的最小值,也就是山底。
根据之前的场景假设,最快的下山的方式就是找到当前位置最陡峭的方向,然后沿着此方向向下走。对应到函数中,就是找到给定点的梯度 ,然后朝着梯度相反的方向,就能让函数值下降的最快!
重复利用这个方法,反复求取梯度,最后就能到达局部的最小值,这就类似于我们下山的过程。而求取梯度就确定了最陡峭的方向,也就是场景中测量方向的手段。
2.2.1 微分
微分例子:
1.单变量的微分,函数只有一个变量时
${\large \frac{\mathrm{d}(x^{2}) }{\mathrm{d} x} =2x} $
2.多变量的微分,当函数有多个变量的时候,分别对每个变量进行求微分
${\large \frac{\partial (x^{2}y^{2})}{\partial x} =2xy^{2}} $
2.2.2 梯度
梯度实际上就是多变量微分的一般化。
例子:
$J(\theta )=5-(4\theta_{1} +3\theta_{2}-2\theta_{3})$
$\nabla J(\Theta)=\left\langle\frac{\partial J}{\partial \theta_{1}}, \frac{\partial J}{\partial \theta_{2}}, \frac{\partial J}{\partial \theta_{3}}\right\rangle=(-5,-2,12)$
可以看到,梯度就是分别对每个变量进行微分,然后用逗号分割开,梯度是用$<>$包括起来,说明梯度其实一个向量。
- 在单变量的函数中,梯度其实就是函数的微分,代表着函数在某个给定点的切线的斜率。
- 在多变量函数中,梯度是一个向量,向量有方向,梯度的方向就指出了函数在给定点的上升最快的方向。梯度的方向是函数在给定点上升最快的方向,那么梯度的反方向就是函数在给定点下降最快的方向。
2.2.3 数学解释
数学公式:$\theta ^{1} =\theta ^{0} +\alpha \bigtriangledown J(\theta)$
意义是:$J$ 是关于 $\theta$ 的一个函数,当前所处位置为 $\theta ^{0}$ 点,要从这个点走到 $J$ 的最小值点。首先先确定前进的方向:梯度的反向。然后走一段距离的步长: $\alpha$ ,走完这个段步长,到达 $\theta ^{1}$!
2.2.4 学习率 α
$\alpha$ 在梯度下降算法中被称为 学习率 或者 步长。通过 $\alpha$ 来控制每一步距离,以保证步子不要跨太大,避免走太快,错过最低点。同时也要保证不要走的太慢,影响效率。$\alpha$ 不能太大也不能太小,太小的话,可能导致走不到最低点;太大的话,导致错过最低点。
2.2.5 梯度乘负号
梯度前加负号,意味着朝梯度相反方向前进。梯度的方向就是函数在此点上升最快的方向。梯度下降需要朝下降最快的方向前进,自然是负梯度的方向,所以需要加上负号。
3 实例
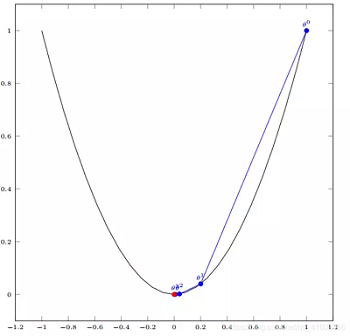
3.1 单变量函数的梯度下降
假设有一个单变量函数:$J(\theta) =\theta ^{2} $
函数的微分:$J^{'} (\theta) =2\theta$
初始化:设置初始位置 $ \theta^{0}=1$,设置学习率: $\alpha =0.4$
根据梯度下降的计算公式:$\theta ^{1} =\theta ^{0} +\alpha \bigtriangledown J(\theta)$
计算过程:
$\theta ^{0} =1$
$\theta ^{1} =\theta ^{0}-\alpha J ^{'}(\theta ^{0})=1-0.4*2=0.2$
$\theta ^{2} =\theta ^{1}-\alpha J ^{'}(\theta ^{1})=0.2-0.4*0.4=0.04$
$\theta ^{3} =0.08$
$\theta ^{4} =0.0016$
如图,经过四次的运算,也就是走了四步,基本抵达函数最低点,也就是山底。
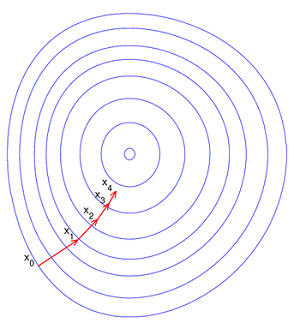
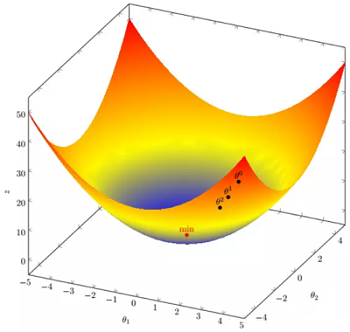
3.2 多变量函数的梯度下降
假设有一个目标函数:$J(\theta)=\theta_{1}^{2} +\theta_{2}^{2}$
假设初始起点:$\theta^{0}= (1,3)$,初始学习率:$\alpha =0.1$
函数的梯度为:$\bigtriangledown J(\theta)=<2\theta_{1},2\theta_{2}>$
计算过程:
$\begin{array}{l} \Theta^{0}=(1,3) \\ \Theta^{1}=\Theta^{0}-\alpha \nabla J(\Theta)=(1,3)-0.1 *(2,6)=(0.8,2.4) \\ \Theta^{2}=(0.8,2.4)-0.1 *(1.6,4.8)=(0.64,1.92) \\ \Theta^{3}=(0.5124,1.536) \\ \Theta^{4}=(0.4096,1.228800000000001) \\ \vdots \\ \Theta^{10}=(0.1073741824000003,0.32212254720000005) \\ \Theta^{50}=\left(1.141798154164342 e^{-05}, 3.42539442494306 e^{-05}\right) \\ \vdots \\ \Theta^{100}=\left(1.6296287810675902 e^{-10}, 4.8888886343202771 e^{-10}\right) \end{array}$
我们发现,已经基本靠近函数的最小值点:
4 批量梯度下降
为了便于理解,这里使用只含有一个特征的线性回归来展开。
此时线性回归的假设函数为:
$h_{\theta} (x^{(i)})=\theta_1 x^{(i)}+\theta_0$
其中 $i=1,2,...,m$,其中 $m$ 表示样本数。
对应的目标函数(代价函数)即为:
$J(\theta_0, \theta_1) = \frac{1}{2m} \sum_ \limits {i=1}^{m}(h_{\theta}(x^{(i)}) - y^{(i)})^2$
批量梯度下降法是最原始的形式,它是指在每一次迭代时使用所有样本来进行梯度的更新。从数学上理解如下:
(1)对目标函数求偏导
$\frac{\Delta J(\theta_0,\theta_1)}{\Delta \theta_j} = \frac{1}{m} \sum_ \limits {i=1}^{m} (h_{\theta}(x^{(i)})-y^{(i)})x_j^{(i)}$
其中 $i=1,2,...,m$,$m$ 表示样本数,$j = 0,1$ 表示特征数,这里我们使用了偏置项 $x_0^{(i)} = 1$
(2)每次迭代对参数进行更新:
$\theta_j := \theta_j - \alpha \frac{1}{m} \sum_ \limits {i=1}^{m} (h_{\theta}(x^{(i)})-y^{(i)})x_j^{(i)}$
注意:这里更新时存在一个求和函数,即为对所有样本进行计算处理,可与下文SGD法进行比较。
优点:
(1)一次迭代是对所有样本进行计算,此时利用矩阵进行操作,实现了并行。
(2)由全数据集确定的方向能够更好地代表样本总体,从而更准确地朝向极值所在的方向。当目标函数为凸函数时,BGD一定能够得到全局最优。
缺点:
(1)当样本数目 $m$ 很大时,每迭代一步都需要对所有样本计算,训练过程会很慢。
从迭代的次数上来看,BGD迭代的次数相对较少。
5 随机梯度下降
随机梯度下降法不同于批量梯度下降,随机梯度下降是每次迭代使用一个样本来对参数进行更新。使得训练速度加快。
对于一个样本的目标函数为:
$J^{(i)}(\theta_0,\theta_1) = \frac{1}{2}(h_{\theta}(x^{(i)})-y^{(i)})^2$
(1)对目标函数求偏导:
$\frac{\Delta J^{(i)}(\theta_0,\theta_1)}{\theta_j} = (h_{\theta}(x^{(i)})-y^{(i)})x^{(i)}_j$
(2)参数更新:
$\theta_j := \theta_j - \alpha (h_{\theta}(x^{(i)})-y^{(i)})x^{(i)}_j$
注意:这里不再有求和符号
6 小批量梯度下降
小批量梯度下降,是对批量梯度下降以及随机梯度下降的一个折中办法。其思想是:每次迭代 使用 batch_size 个样本来对参数进行更新。
这里我们假设$batch_size = 10$,样本数$m=1000$
优点:
(1)通过矩阵运算,每次在一个 batch 上优化神经网络参数并不会比单个数据慢太多。
(2)每次使用一个 batch 可以大大减小收敛所需要的迭代次数,同时可以使收敛到的结果更加接近梯度下降的效果。(比如上例中的30W,设置 batch_size=100 时,需要迭代 3000 次,远小于 SGD 的 30W 次)
(3)可实现并行化。
缺点:
(1)batch_size的不当选择可能会带来一些问题。
batcha_size的选择带来的影响:
(1)在合理地范围内,增大batch_size的好处:
a. 内存利用率提高了,大矩阵乘法的并行化效率提高。
b. 跑完一次 epoch(全数据集)所需的迭代次数减少,对于相同数据量的处理速度进一步加快。
c. 在一定范围内,一般来说 Batch_Size 越大,其确定的下降方向越准,引起训练震荡越小。
(2)盲目增大batch_size的坏处:
a. 内存利用率提高了,但是内存容量可能撑不住了。
b. 跑完一次 epoch(全数据集)所需的迭代次数减少,要想达到相同的精度,其所花费的时间大大增加了,从而对参数的修正也就显得更加缓慢。
c. Batch_Size 增大到一定程度,其确定的下降方向已经基本不再变化。
参考文献:
因上求缘,果上努力~~~~ 作者:图神经网络,转载请注明原文链接:https://www.cnblogs.com/BlairGrowing/p/14819885.html

