Diffusion Model
参考
概念
Diffusion
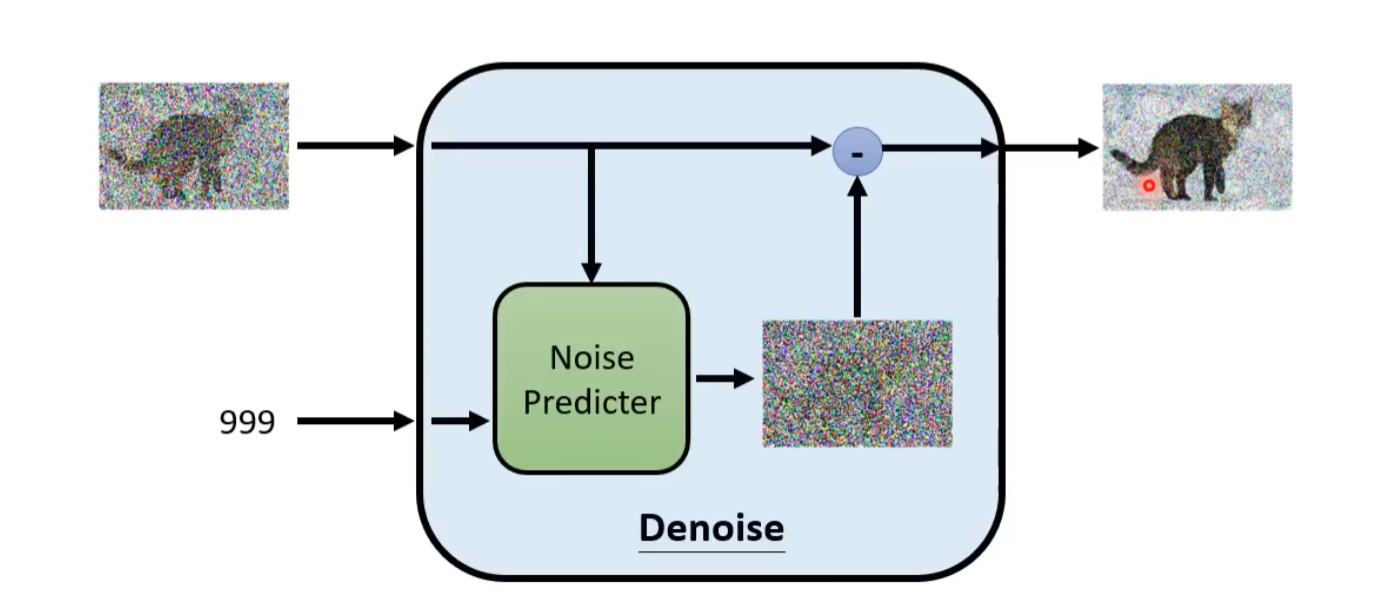
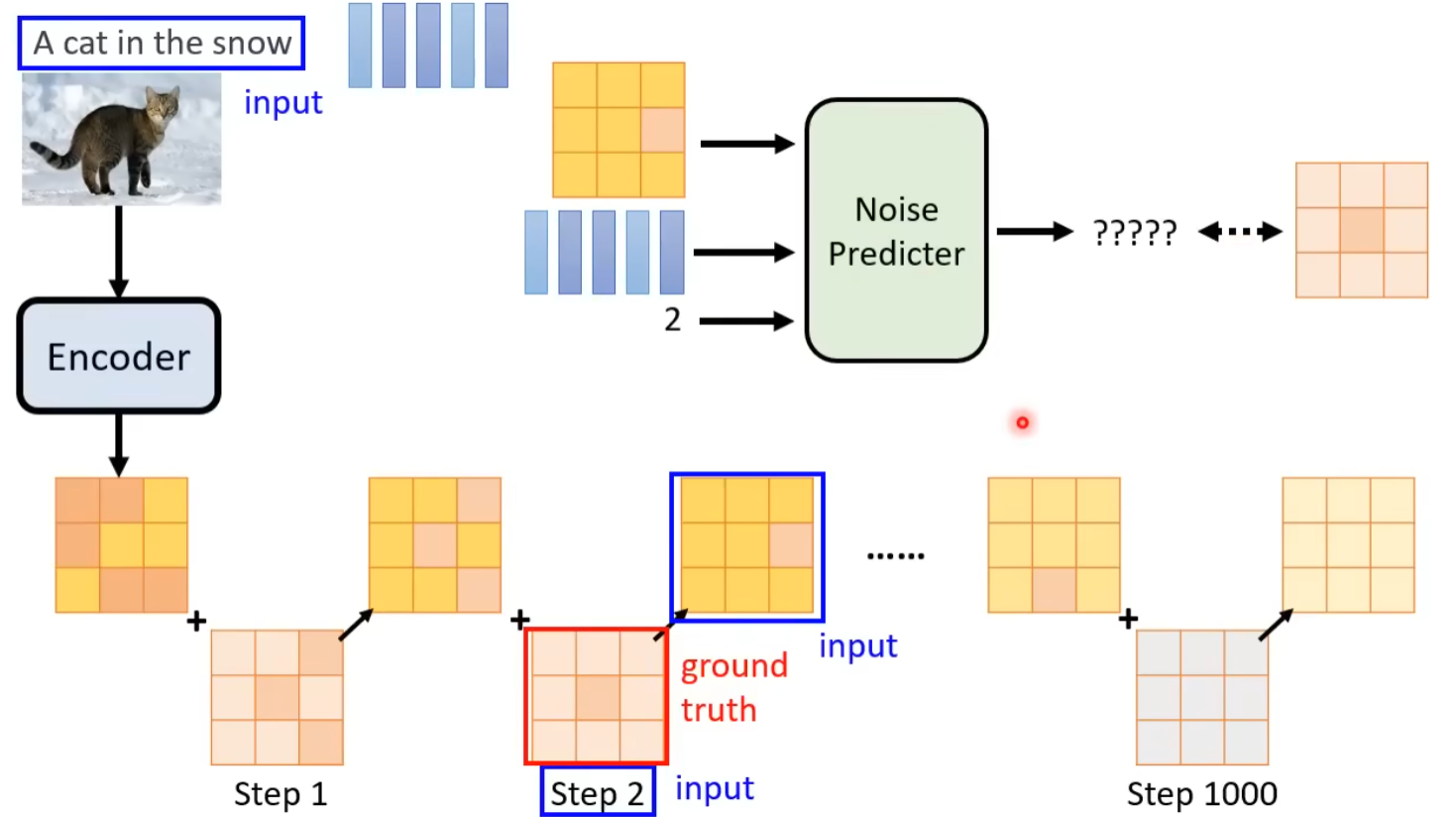
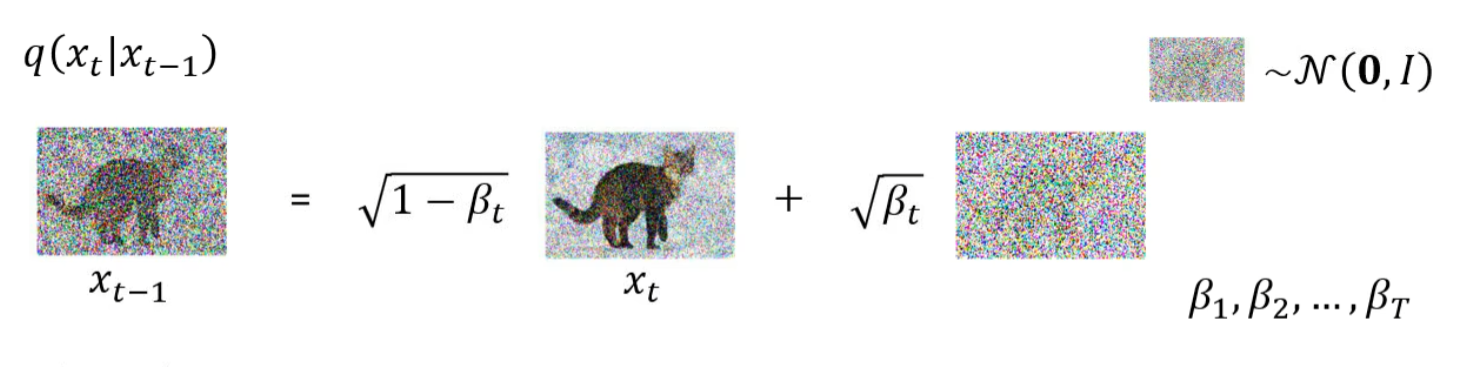
训练 N 个噪音预测器,每个预测器都是一个神经网络,每个神经网络都是一个噪音预测器
模型的 Ground Truth 来自于将原始的图片加上噪音,然后输入到神经网络中
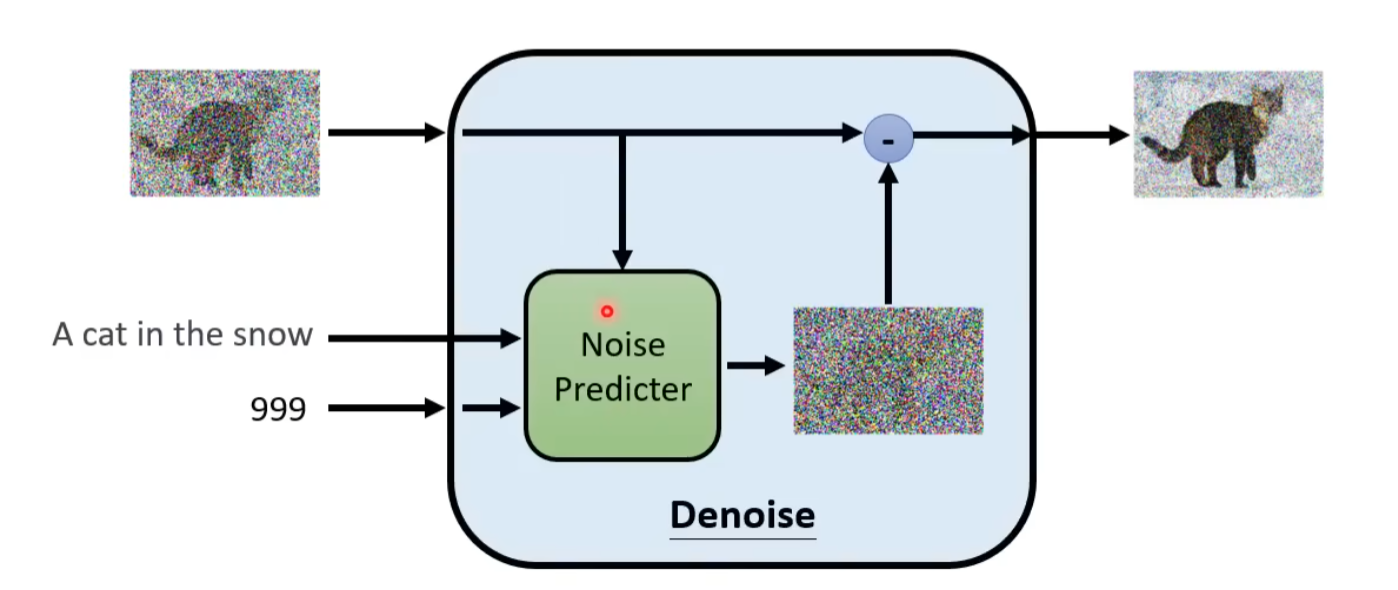
How to Text-to-Image?
需要大量的 Text-Image Pair,比如说经典的数据来源LAION
那么做到这一点非常简单,就是将 Text 加入到 Noise Predictor 中,然后训练一个噪音预测器
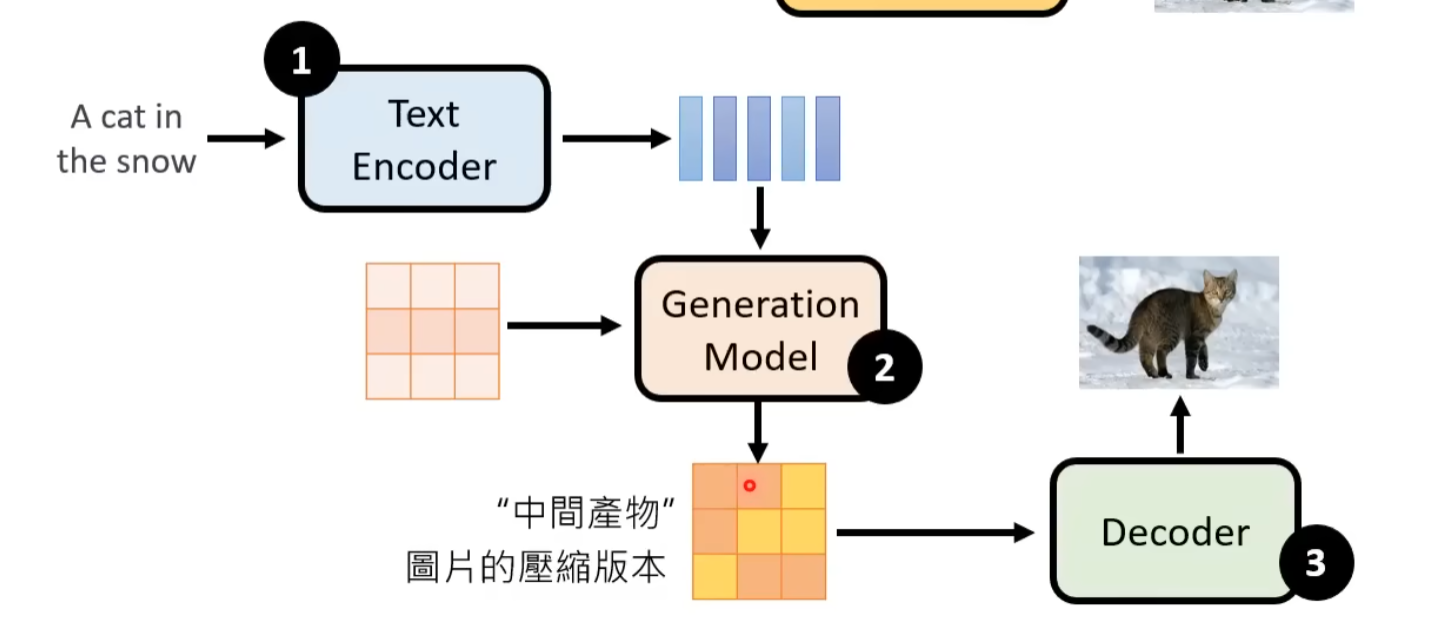
Stable Diffusion
需要一个 text 的 embedding,然后将这个 embedding 作为 Generation Model 的输入
Encoder
-
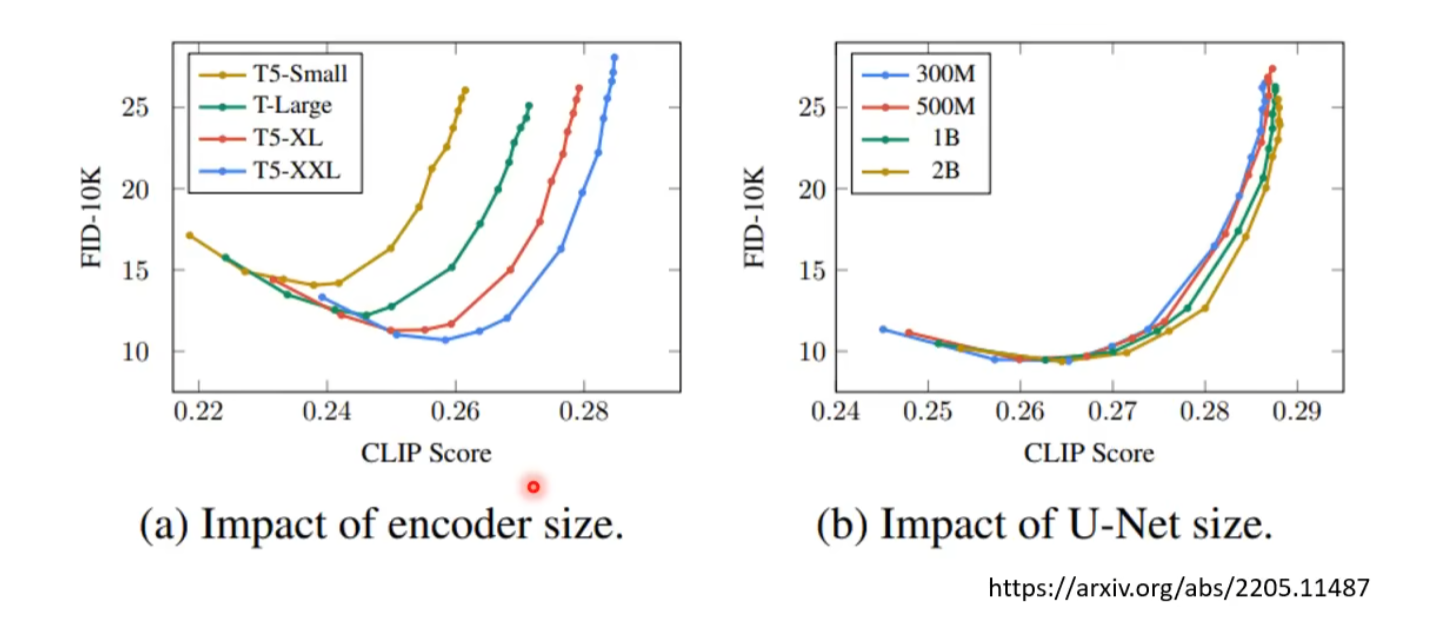
Text Encoder 的影响
现在可以使用 BERT、GPT 等网络生成文字的 embedding
FID Score: 越低越好
Clip Score: 越高越好
-
指标
-
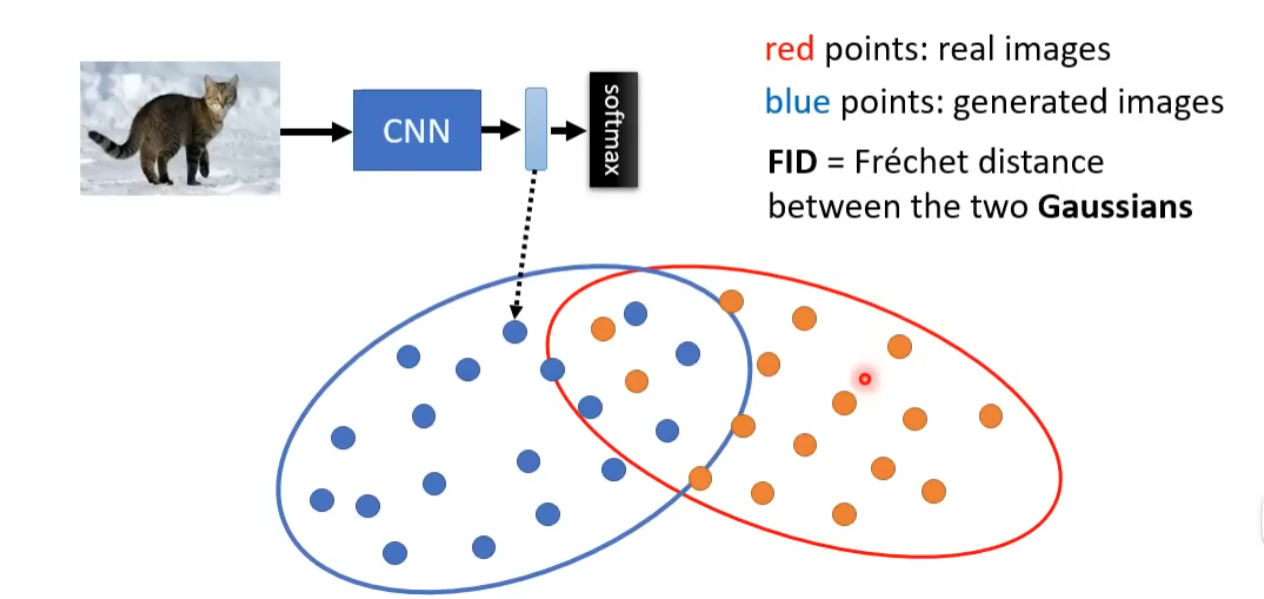
FID : 描绘真实图片和生成图片的距离
假设两类表示向量的分布是高斯分布,计算两个高斯分布的距离
需要大量的图片计量 FID
-
Clip Score: 用于评估生成的图片和文本的相似度
CLIP 模型做 Text-Image Embedding 的对比学习, CLIP Score 就是这个对比学习的结果
描述了生成的图片和文本的相似度
-
Decoder
训练不依赖 Text-Image Pair,仅以 Image 为输入
如果只是一个降采样的结果,实际上就是做一个 Super Resolution 的任务
如果中间产物是一个 Latent Representation,那么就是一个 AE 的任务(如何保证 latent 在同一个分布里面?)
Generator
此时的 Ground Truth 的 noise 是加入在 AE 对图片的 Encoder 后的 Latent Representation 上的
总结
- 训练 一个 Auto-Encoder,目的是为了使用到大量的没有文本配对的图片信息,然后将图片的信息转换为一个 latent representation
- 使用一个 Text Encoder,将文本转换为一个 embedding
- 训练一个 Generator,将这个 text embedding + denoise step + latent representation 转换为 ground truth 的 latent representation
- 每一步的 ground truth 都有原始的 letent representation 加上噪音
Diffusion Model 原理
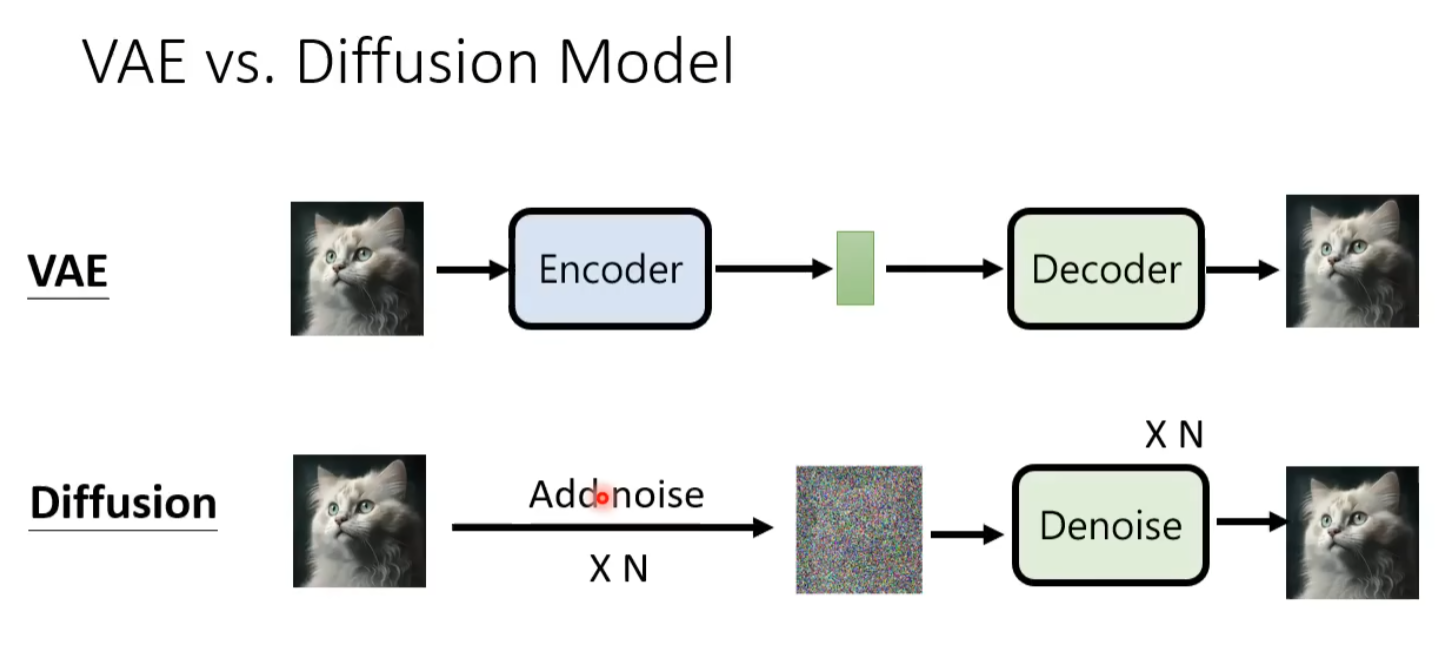
VAE 和 Diffusion Model 很相似(from 李宏毅)
DDPM-Training
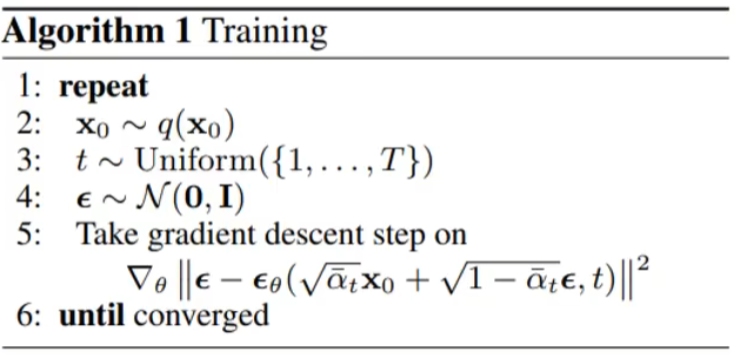
- \(x_0\) 代表干净的图片
- \(t\) 代表一个加噪音的步骤数目
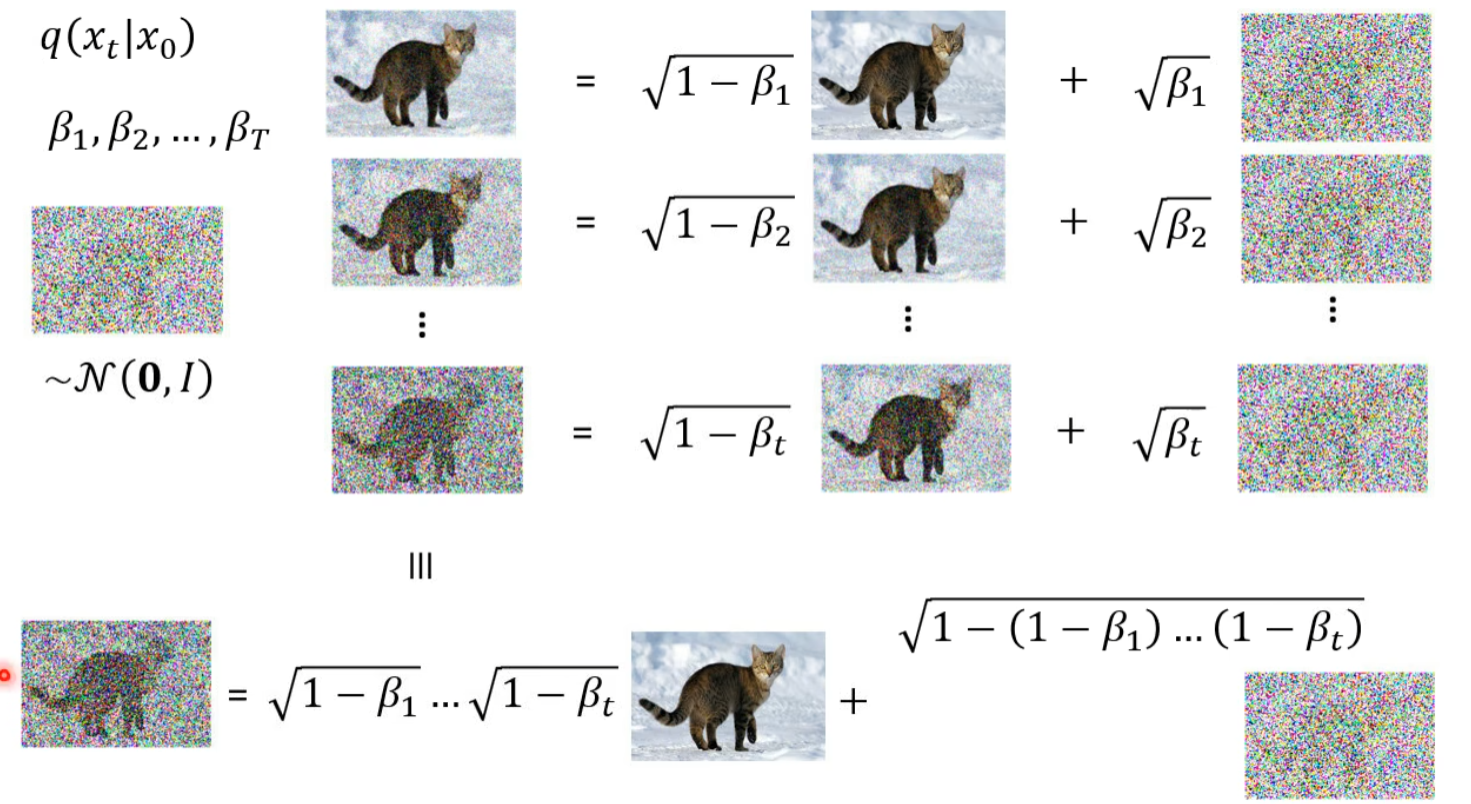
- \(\sqrt{\bar{a_t}}x_0 + \sqrt{1 - \bar{a_t}} \epsilon\),代表用预先定义好的权值加权求和得出之后的 noise image, \(\bar{\alpha_1}, \dots, \bar{\alpha_T}\) 越来越小
- \(\epsilon_\theta\),代表噪音预测器
这样训练的过程与之前介绍的 diffusion model 的训练过程不是很一样
这样训练过程直接做一次噪音,然后直接预测这个噪音,而不是像之前的 diffusion model 那样,每一步都预测噪音
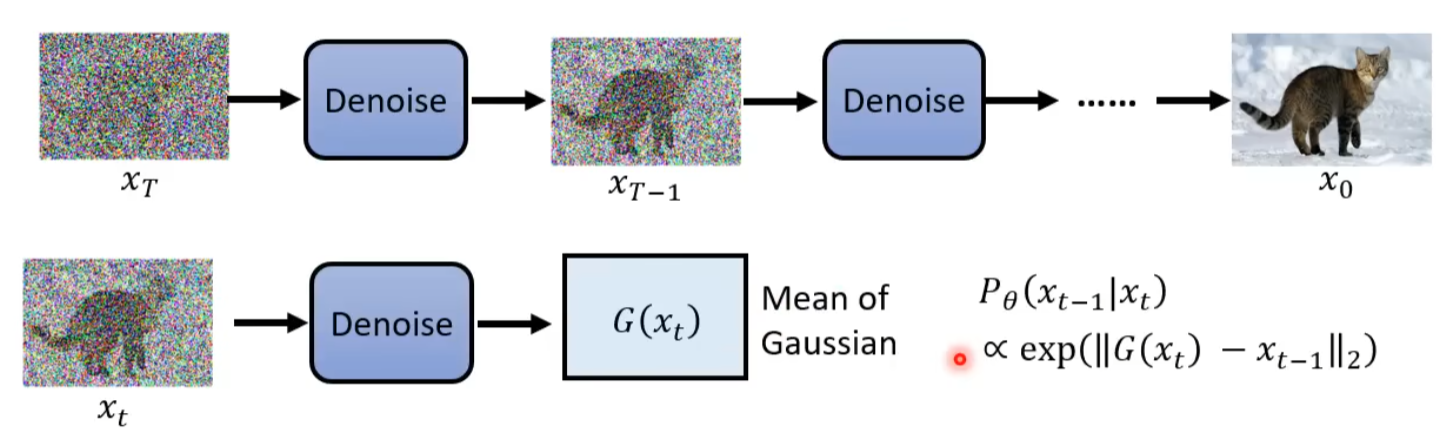
DDPM-Generation
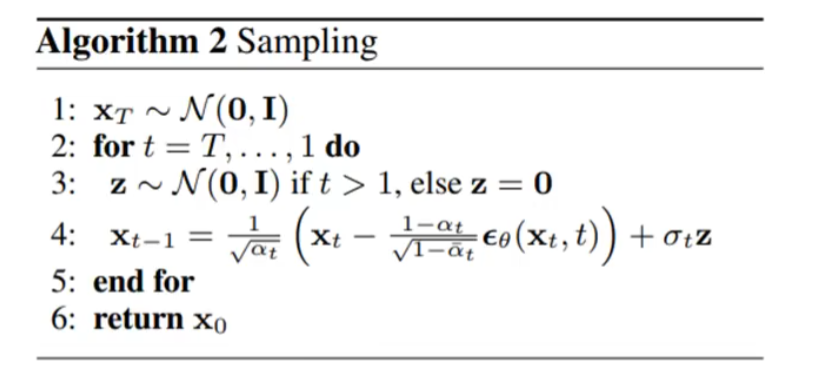
- \(z\),每一次先生成一个噪音
- \(\frac{1 - \alpha_t}{\sqrt{1 - \bar{\alpha_t}}} \epsilon_\theta(x_t, t)\), 代表预测的噪音
- 最后还要加入一个噪音,得到最终的图片
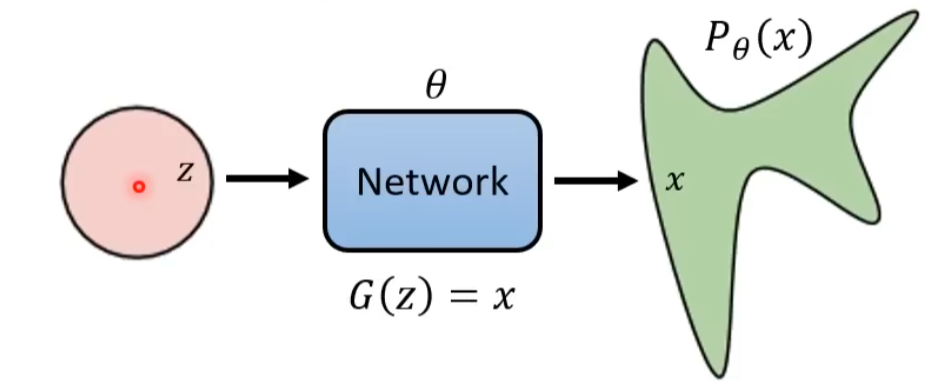
Image Generation 的 共同目标
从简单分布采样出的随机向量\(z\),经过生成器\(G(z)\),得到最终想要的图片\(x\)
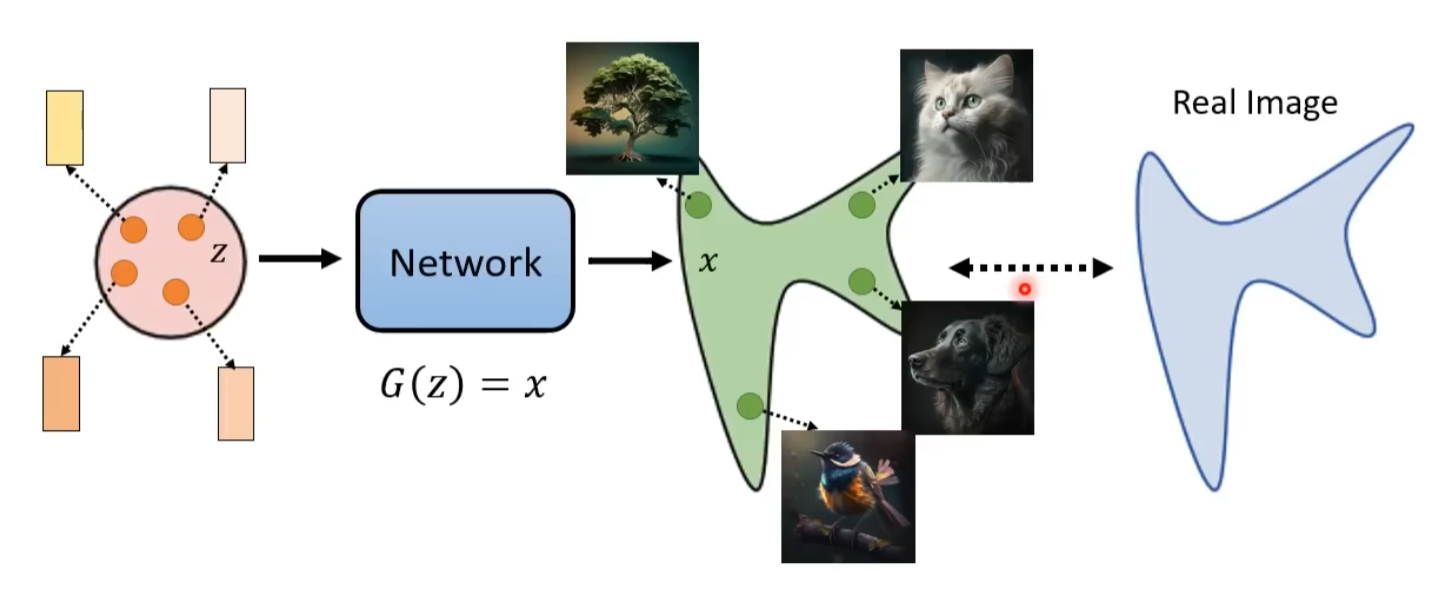
为了限制解的空间,我们需要加先验/条件,使用 Text Encoder 得到的 embedding 作为先验
为什么极大似然估计等于最小化 KL 散度?
VAE
对于 VAE,\(P_\theta(x) = \int P(z) P_\theta(x|z) \text{d}z\)
但是在实际情况下,\(P_\theta(x|z) = \begin{cases} 1 & \text{if } G(z) = x \\ 0 & \text{if } G(z) \neq x \end{cases}\)
因此在 VAE 中,将\(G(z)\)视作一个高斯分布的均值,\(P_\theta(x|z) = \mathcal{N}(G(z), \sigma^2)\)
VAE 利用 EM 算法同样的思想,通过迭代求解积分
两边对\(z\)求积分
我们不需要关心\(q(z|x)\) 的具体形式,只需要关心 KL 散度的最小值,因此我们可以通过变分推断的方法,先最小化 KL 散度,然后再最大化 Lower Bound
DDPM
假设具有马尔可夫性质,\(P(x_0, \dots, x_T) = P(x_T) \prod_{t=1}^{T} P(x_{t-1} | x_{t})\)
那么我们可以得到
DDPM:
为了求解 q,我们用如下的方法
求解 q 不需要一个序列的数据,因为序列的数据合并起来等同于采样一个噪声
求解变分:Understanding Diffusion Models: A Unified Perspective
这一段在说明从 Diffusion 原始 IDEA 到算法描述的过程,以后再来看

