

ACM - 最短路 - AcWing 849 Dijkstra求最短路 I
题解
以此题为例介绍一下图论中的最短路算法。先让我们考虑以下问题:
给定一个 个点 条边的有向图(无向图),图中可能存在重边和自环,给定所有边的边权。请求出给定的一点到另一点的权值之和最小的一条路径。
上述问题即所谓的最短路问题。解决这类问题的常用最短路算法:
-
算法(多源最短路径)
-
算法(没有负权边的单源最短路径)
-
- 算法(含有负权边的单源最短路径)
另外还有著名的启发式搜索算法 —— 算法。我们以此题为模板来学习 算法。
示例
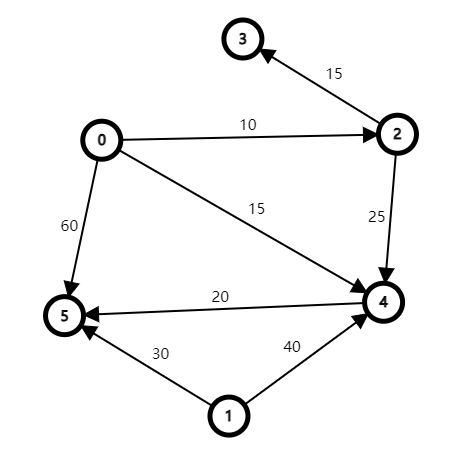
给定一个图来演示算法过程,以下图为例求解从 号点(称为源点)出发到其余点的最短路径的距离。
初始化更新
声明一个 数组(取 首字母),用来记录当前更新中已找到全局最短距离的点的编号。
声明一个 数组,用来记录源点只能先到达集合 中的点,再直接到达目标点的那些路径(即中间没有经过 以外的点就直接到目标点)的最短距离(源点 目标点)。
在初始化更新中, 数组更新为:
数组被更新为:
解释上述更新。
初始的 数组为 (源点编号)。
表示 号点(源点)先到 数组中的点,再到 号点(目标点)的最短距离,即使可能存在自环,由于 算法的使用前提是非负权(即边的权值大于等于 ),因此源点到自己的最短距离肯定为 。
表示 号点(源点)先到 数组中的点,再到 号点(目标点)的最短距离,由于此时 数组中只有一个 号点(源点),而 号点到 号点没有边直接连接,因此为 (表示不能先到 数组中的点,再到达 号点)。
其余点可类似解释。
第一轮更新
更新 数组
设 (图的所有点)。
在第一轮更新中,我们取 中 对应 数组数值最小的那个点,即 号点( 小于 、、),此时 数组更新为:
根据我们对 数组的解释,此时 号点的 已到达全局最短距离,此时我们不禁会想,这就达到最短距离了?难道 就是 号点(源点)到 号点的最短距离了?
令 ,则源点到 号点的最短路径只能为以下两种情况(中间点全为 中的点,中间点有一个不为 中的点):
- 源点 号点 (,为了方便说明此处把目标点剔除)
- 源点 号点 ()
注:源点直接到 号点的情况包含在第一种情况(因 始终含源点)。
显然最短路径不会是第二种情况(这是算法正确性证明的核心,在之后几轮更新里该性质并不明显)。
更新 数组
然后重新更新 数组(因 数组被扩充了,而 依赖 ), 数组更新为:
可以看到只有一个值被更新了。记扩充前的 为 (此时 ),由 数组的含义,我们只需比较得出是否新加入的点使得当前最短路径更短。
注意,上述等号理解为赋值。此处为书写方便,使用图的邻接矩阵表示 。
比如更新 。更新前 表示从源点出发,先到 中的点,再到目标点( 号点)的最短路径距离;更新后 应该为从源点出发,先到 中的点,再到目标点( 号点)的最短路径距离。
我们重新明确一下更新后的最短路径可能的情况(注意,此处非常关键),对于该最短路径,我们考虑目标点( 号点)的上一个点(!!!!!),该点只能为此轮扩充点( 号点),或者不是此轮扩充点(非 号点),如果是扩充点,则该最短路径距离为 ;如果不是扩充点,则该最短路径为 。
嗯?上个点不是扩充点的情况为 ?想想也确实,上个点在 中,但不是扩充点,说明必为 中的点,而 中的点在上一轮更新中已经保证全局最短距离。为更清晰地展示,我们列出更新后最短路径的可能情况:
- 源点 非扩充点 目标点上个点(非扩充点) 目标点
- 源点 非扩充点 目标点上个点(扩充点) 目标点
- 源点 扩充点 目标点上个点(非扩充点) 目标点
- 源点 扩充点 目标点上个点(扩充点) 目标点
目标点上个点有两种可能:扩充点和非扩充点;源点到目标点上个点的路径有两种可能:经过扩充点和不经过扩充点。易知,第 种和第 种情况都一定不是最短路径(第 种情况非最短是由于目标点上个点在 中)。因此只更新第 种和第 种情况产生的最短路径即可。
第二轮更新
更新 数组
根据上面的规则,我们选取此轮的扩充点为 号点( 在非 点中最小, 小于 、、),因此 数组被更新为:
根据我们对 数组的解释,此时 号点的 已到达全局最短距离。
此时 ,源点到 号点的最短路径只能为以下两种情况:
- 源点 号点 (,为了方便说明此处把目标点剔除)
- 源点 号点 ()
我们说,此时最短路径不可能为第 种情况,正是这性质使得源点到 号点的最短路径只能为第 种情况,即 为全局最短距离。
由于 数组包含源点,因此第 种情况也可以写成 源点 号点。此时写成:
- (源点 号点)
- (源点 ) 号点(此处 为路径中出现的第一个 中的点)
由于 ,显然第 种情况产生最短路径。
更新 数组
此时的扩充点为 号点,由 数组的含义,我们只需比较得出是否新加入的点使得当前最短路径更短。由式子:
更新 数组得:
第三轮更新
此轮加入的扩充点为 , 数组更新为:
根据加入的扩充点更新数组 为:
第四、五轮更新
加入的扩充点按顺序为 、。 数组更新为:
数组 被更新为与原来一致,即:
算法步骤
下面给出算法:
输入:赋权有向图 。
输出:源点 到其余各点的最短距离。
初始化 ,遍历所有点,初始化当前最短距离
不等于 ,执行循环 ,若等于,转
确定扩充点
加入扩充点 ,
更新 。遍历 所有点,
结束。
从给出的算法步骤可以看出,整个算法大部分时间都在执行两层循环。外层循环是从第 步执行到 第 步,由于每一次循环我们都给 数组增加一个扩充点,外层循环执行次数为顶点数;而内层循环的时间复杂度则较为复杂,其复杂的原因也是 算法拥有良好扩展性的原因:使用何种数据结构实现算法。
一般来说,其具体实现方式有四种:
- 顺序遍历集合 确定扩充点
- 使用二叉堆作为优先队列确定扩充点
- 使用二项堆作为优先队列确定扩充点
- 使用斐波那契堆堆作为优先队列确定扩充点
我们有二叉堆、二项堆和斐波那契堆的各个操作的时间复杂度(来自《算法导论》):
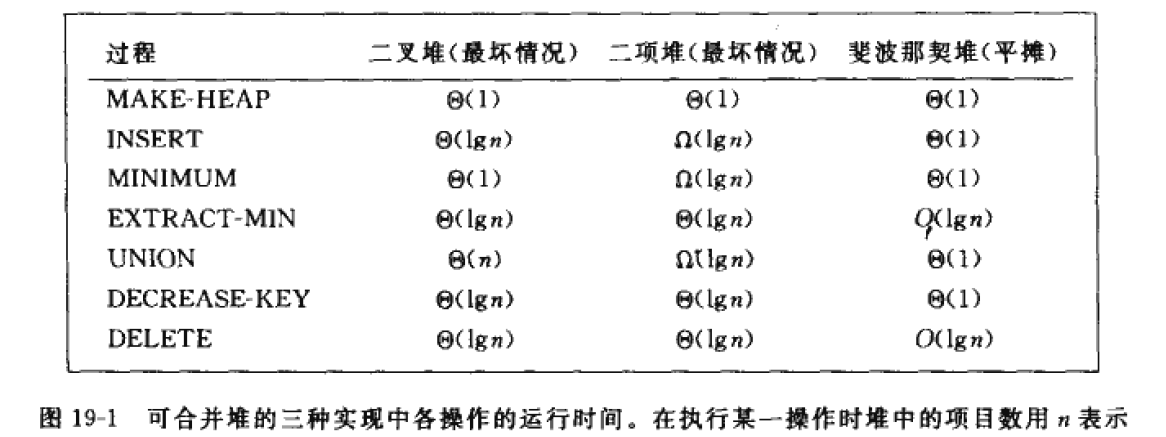
设图中的顶点数为 ,边数为 ,则平均每个点的边数为 。对于 算法,我们可以得到统一的时间复杂度计算公式:
对于上述四种具体实现方式,分别计算其时间复杂度:
- 顺序遍历
- 二叉堆
- 二项堆
- 斐波那契堆堆
注,上述等式中的相等均是在“时间复杂度”意义下的相等。
程序设计
我们实现第一种用顺序遍历实现的 算法。
程序:
#include<cstdio>
#include<cstring>
#include<algorithm>
#include<iostream>
#include<vector>
using namespace std;
int n, m;
int graph[505][505]; // 邻接矩阵存图
int dis[505]; // dis[i]: 源点先到S集合,再到目标点的最短距离
int vis[505]; // vis[i]:表示i号结点的全局最短距离是否已经找到(0-1数组实现S集合)
int dijkstra()
{
// 初始化更新
vis[1] = 1; // 等价于将源点加入S集合
dis[1] = 0; // 源点到自己的最短距离为0
for (int i = 2; i <= n; ++i) dis[i] = graph[1][i];
// 开始循环更新(当n号点的最短距离找到时,直接退出循环)
for (int k = 0; k < n; ++k) {
// 确定此轮扩充点
int mi = -1; // mi : min_index,扩充点
for (int i = 1; i <= n; ++i) {
if (vis[i] == 0 && (mi == -1 || dis[i] < dis[mi])) mi = i;
}
// S集合加入扩充点
vis[mi] = 1;
// 更新距离
for (int i = 1; i <= n; ++i) {
if (vis[i] == 0) dis[i] = min(dis[i], dis[mi] + graph[mi][i]);
}
}
// 如果起点到达不了n号节点,则返回-1
if (dis[n] == 0x3f3f3f3f) return -1;
// 返回起点距离n号节点的最短距离
return dis[n];
}
int main()
{
// 初始化
int x, y, z;
cin >> n >> m; // 图有n个顶点,m条边
memset(graph, 0x3f, sizeof(graph));
memset(dis, 0x3f, sizeof(dis));
memset(vis, 0, sizeof(vis));
for (int i = 0; i < m; ++i) {
cin >> x >> y >> z;
if (graph[x][y] > z) graph[x][y] = z; // 处理重边的情况
}
// 输出图最短距离
cout << dijkstra() << endl;
return 0;
}
我们实现用堆优化的 算法,也即使用优先队列维护 中的最小值。
程序:
#include<cstdio>
#include<cstring>
#include<algorithm>
#include<iostream>
#include<vector>
#include<queue>
using namespace std;
typedef pair<int, int> PII;
int n, m;
vector<vector<pair<int, int> > > graph; // 邻接表存图
int dis[505]; // dis[i]: 源点先到S集合,再到目标点的最短距离
int vis[505]; // vis[i]:表示i号结点的全局最短距离是否已经找到(0-1数组实现S集合)
int dijkstra()
{
dis[1] = 0;
// 建立优先队列维护最小值
priority_queue<PII, vector<PII>, greater<PII>> heap;
heap.push({ 0, 1 }); // first存储距离,second存储节点编号
while (heap.size()) {
// 取出优先队列队首元素(即本轮扩充点)
PII mi = heap.top();
heap.pop();
int dist = mi.first; int node = mi.second;
// heap存储的second为节点编号,在执行过程中会出现重复
// 比如heap中有{2, 3},表示源点经过S到3号顶点的最短距离为2
// 下面的for循环会将{2, 3}更新为{1, 3},但实际执行时没有“修改”,而是优先队列的“压入”(push)
// “修改” = “压入新值” + “弹出旧值”(第一步“压入”被下面完成,第二步“弹出”被上面执行)
// {1, 3}在下面被压入heap,{2, 3}在上面被弹出
if (vis[node]) continue;
// 这保证了每轮更新至少出现一个扩充点,因此下面的for执行n-1次(与计算出的时间复杂度吻合)
vis[node] = 1;
for (auto tmp : graph[node]) { // 取出本轮扩充点的每条出边
// 事实上只有扩充点的出边对应的点的dis出现变化,其余点的dis未发生变化
// 这变化使得我们需要更新dis数组和优先队列heap
int tmpnode = tmp.first;
int tmpdist = tmp.second;
if (dis[tmpnode] > dis[node] + tmpdist) { // 松弛
dis[tmpnode] = dis[node] + tmpdist;
heap.push({ dis[tmpnode], tmpnode }); // 注意这是“压入”更短的距离,不是“修改”
}
}
}
if (dis[n] == 0x3f3f3f3f) return -1;
return dis[n];
}
int main()
{
// 初始化
int x, y, z;
cin >> n >> m; // 图有n个顶点,m条边
graph.resize(n + 1);
memset(dis, 0x3f, sizeof(dis));
memset(vis, 0, sizeof(vis));
for (int i = 0; i < m; ++i) {
cin >> x >> y >> z;
graph[x].push_back({ y, z });
}
// 输出图最短距离
cout << dijkstra() << endl;
return 0;
}
最短路算法对比
| 算法 | - | ||
|---|---|---|---|
| 空间复杂度 | |||
| 时间复杂度 | 看具体实现 | ||
| 负权边时是否可以处理 | 可以 | 不能 | 可以 |
| 判断是否存在负权回路 | 不能 | 不能 | 可以 |
其中 表示图的顶点数, 表示图的边数。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· winform 绘制太阳,地球,月球 运作规律
· AI与.NET技术实操系列(五):向量存储与相似性搜索在 .NET 中的实现
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)