

Storm配置运行
Storm核心概念
Nimbus:Storm集群主节点,负责资源分配和任务调度。我们提交任务和截止任务都是在Nimbus上操作的。一个Storm集群只有一个Nimbus节点。
Supervisor:Storm集群工作节点,接受Nimbus分配任务,管理所有Worker。
Worker:工作进程,每个工作进程中都有多个Task。
Task:任务,每个Spout和Bolt都是一个任务,每个任务都是一个线程。
Topology:计算拓扑,包含了应用程序的逻辑。
Stream:消息流,关键抽象,是没有边界的Tuple序列。
Spout:消息流的源头,Topology的消息生产者。
Bolt:消息处理单元,可以过滤、聚合、查询数据库。
Stream grouping:消息分发策略,一共6种,定义每个Bolt接受何种输入。
Reliability:可靠性,Storm保证每个Tuple都会被处理。
Storm.yaml常用配置项
|
配置选项名称 |
配置选项作用 |
|
topology.max.task.parallelism |
每个Topology运行时最大的executor数目 |
|
topology.workers |
每个Topology运行时的worker的默认数目,若在代码中设置,则此选项值被覆盖 |
|
storm.zookeeper.servers |
zookeeper集群的节点列表 |
|
storm.local.dir |
Storm用于存储jar包和临时文件的本地存储目录 |
|
storm.zookeeper.root |
Storm在zookeeper集群中的根目录,默认是“/” |
|
ui.port |
Storm集群的UI地址端口号,默认是8080 |
|
nimbus.host: |
Nimbus节点的host |
|
supervisor.slots.ports |
Supervisor 节点的worker占位槽,集群中的所有Topology公用这些槽位数,即使提交时设置了较大数值的槽位数,系统也会按照当前集群中实际剩余的槽位数来 进行分配,当所有的槽位数都分配完时,新提交的Topology只能等待,系统会一直监测是否有空余的槽位空出来,如果有,就再次给新提交的 Topology分配 |
|
supervisor.worker.timeout.secs |
Worker的超时时间,单位为秒,超时后,Storm认为当前worker进程死掉,会重新分配其运行着的task任务 |
|
drpc.servers |
在使用drpc服务时,drpc server的服务器列表 |
|
drpc.port |
在使用drpc服务时,drpc server的服务端口 |
Storm运行依赖zookeeper,需启动zookeeper,在此不做过多介绍可参考:https://www.cnblogs.com/zhaojiankai/p/7126181.html
Zookeeper集群在Storm集群中的作用:
Zookeeper集群负责Nimbus节点和Supervior节点之间的通信,监控各个节点之间的状态。比如通常我们提交任务的时候是在Nimbus节点上执行的,Nimbus节点通过zk集群将任务分发下去,而Supervisor是真正执行任务的地方。Nimbus节点通过zk集群监控各个Supervisor节点的状态,当某个Supervisor节点出现故障的时候,Nimbus节点就会通过zk集群将那个Supervisor节点上的任务重新分发,在其他Supervisor节点上执行。这就意味着Storm集群也是高可用集群,如果Nimbus节点出现故障的时候,整个任务并不会停止,但是任务的管理会出现影响,通常这种情况下我们只需要将Nimbus节点恢复就可以了。Nimbus节点不支持高可用,这也是Storm目前面临的问题之一。不过一般情况下,Nimbus节点的压力不大,通常不会出现问题。
一般情况下,Zookeeper集群的压力并不大,一般只需要部署3台就够了。Zookeeper集群在Storm集群中逻辑上是独立的,但在实际部署的时候,一般会将zk节点部署在Nimbus节点或Supervisor节点上。
安装:
1.解压安装文件到制定的目录,并把storm加入到环境变量
wget http://mirror.bit.edu.cn/apache/storm/apache-storm-1.2.2/apache-storm-1.2.2.tar.gz
sudo tar -zxvf apache-storm-1.2.2.tar.gz -C /usr/local
cd /usr/local
sudo mv apache-storm-0.9.6 storm
sudo vi /etc/profile
export STORM_HOME=/usr/local/storm
export PATH=$PATH:${STORM_HOME}/bin
sudo source /etc/profile
2.配置storm.yaml

storm.zookeeper.servers:
- "node3"
nimbus.seeds: ["node3"]
supervisor.slots.ports:
- 6700
- 6701
- 6702
- 6703
ui.port: 8889
storm.local.dir: "/usr/local/storm/data"
注意:以上配置,凡是有冒号的地方,冒号后都要有个空格。
将配置好的拷贝到其余两台机器上
[root@log1 local]# scp -pr apache-storm-1.0.0 root@114.55.29.241:/usr/local/ [root@log1 local]# scp -pr apache-storm-1.0.0 root@114.55.253.15:/usr/local/
启动 nimbus、supervisor、ui
cd /usr/local/storm/bin
./storm nimbus
./storm supervisor
./storm ui
node1:启动、nimbus、supervisor、ui
node2:supervisor
node3:supervisor
Storm常用命令
1、任务提交命令:storm jar 【jar路径】 【拓扑包名.拓扑类名】 【拓扑名称】
storm jar /export/servers/storm/examples/storm-starter/storm-starter-topologies-1.0.3.jar org.apache.storm.starter.WordCountTopology wordcount
与hadoop不同的是:不需要指定输入输出路径 如:hadoop jar /usr/local/wordcount.jar /data.txt /wcout
##杀死任务命令格式:storm kill name -w seconds storm kill wordcount -w 10 ##停用任务命令格式:storm deactivte name storm deactivte wordcount ##启用任务命令格式:storm activate name storm activate wordcount ##平衡任务命令格式:storm rebalance name storm rebalance wordcount
storm策略和storm并行度
storm策略
storm里面有6种类型的stream grouping:
1.Shuffle Grouping: 随机分组, 随机派发stream里面的tuple, 保证每个bolt接收到的tuple数目相同。轮询,平均分配。
2. Fields Grouping:按字段分组, 比如按userid来分组, 具有同样userid的tuple会被分到相同的Bolts, 而不同的userid则会被分配到不同的Bolts。
3. All Grouping: 广播发送, 对于每一个tuple, 所有的Bolts都会收到。
4. Global Grouping: 全局分组, 这个tuple被分配到storm中的一个bolt的其中一个task。再具体一点就是分配给id值最低的那个task。
5. Non Grouping: 不分组, 这个分组的意思是说stream不关心到底谁会收到它的tuple。目前这种分组和Shuffle grouping是一样的效果,不平均分配。
6. Direct Grouping: 直接分组, 这是一种比较特别的分组方法,用这种分组意味着消息的发送者举鼎由消息接收者的哪个task处理这个消息。 只有被声明为Direct Stream的消息流可以声明这种分组方法。而且这种消息tuple必须使用emitDirect方法来发射。消息处理者可以通过TopologyContext来或者处理它的消息的taskid(OutputCollector.emit方法也会返回taskid)
storm并行度
回顾之前,我们已经介绍过,一个Topology可以运行在多个worker上,这样可以提高数据处理能力。因为一个worker就是一个进程,很自然的,我们可以想到,如果一个worker中可以再起多个线程的话,那么效率就会更高。事实上,Storm就是这么干的,worker并不是Storm集群中的最小运行单位。Executer才是Storm集群中的最小运行单位。Executer实际上就是一个线程。你可以这样理解,worker是Topology的最小运行单位,而Executer是Spout或者Bolt的最小运行单位。回顾一下我们的WordCountApp案例中,创建Topology的代码
//定义拓扑
TopologyBuilder builder = new TopologyBuilder();
builder.setSpout(“word-reader” , new WordReader());
builder.setBolt(“word-normalizer” , new WordNormalizer()).shuffleGrouping(“word-reader” );
builder.setBolt(“word-counter” , new WordCounter()).fieldsGrouping(“word-normalizer” , new Fields(“word”));
StormTopology topology = builder .createTopology();
在这段代码中,我们没有设置并发度,也没有设置worker的数量。Storm默认就会给这个Topology分配1个Worker,在这个Worker启动三个线程,1个用来运行WordReader,1个线程用来运行WordNormalizer,1个线程用来运行WordCounter。
如果我们用图形来表示的话,应该是这样:
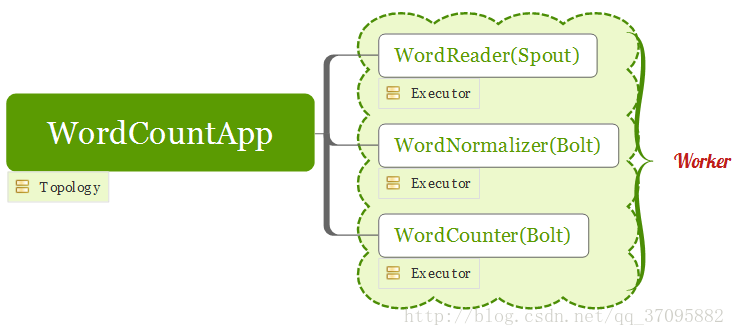
这个图的这个图意思是,WordCountApp这个Topology运行在一个Worker上,在这个worker中,分别其了三个线程(executor),分别用来执行Topology的三个组件:WordReader、WordNormalizer、WordCounter。
那么假设我们想用两个线程来执行WordNormalizer,行不行呢?
很简单,目前我们setSpout和setBolt的时候,调用的分别是TopologyBuilder以下两个方法:
setSpout(String id, IRichSpout spout )
setBolt(String id, IRichBolt bolt )
这两个方法,表示使用默认的并发度,也就是1.
我们可以调用另外两个方法,显示的指定并发度。
setSpout(String id, IRichSpout spout , Number parallelism_hint)
setBolt (String id , IRichBolt bolt, Number parallelism_hint )
现在我们修改WordCountApp,设置WordNormalizer 并发度为2
1.builder.setBolt( “word-normalizer” , new WordNormalizer(),2).shuffleGrouping(“word-reader” );
为了更加方面的观察,我们将WordNormalizer中prepare方法打印的内容修改一下:
1.System.out.println( “WordNormalizer.prepare(),taskId:” +context.getThisTaskId()+ “,hashcode:” +this);
现在运行程序,观察输出,输出的日志中,应该包含以下两句话:
1.WordNormalizer.prepare(),taskId:3,hashcode:com.tianshouzhi.study.wordcountapp.bolts.WordNormalizer@41106aa2
2.WordNormalizer.prepare(),taskId:4,hashcode:com.tianshouzhi.study.wordcountapp.bolts.WordNormalizer@3f4c04b1
我们可以看到,我们设置并行度为2的时候, WordNormalizer被实例化了2次,意味着有2个 WordNormalizer实例,而Storm会分配2个executer来分别运行一个实例。所以,此时我们的Topology运行时,是这样的:
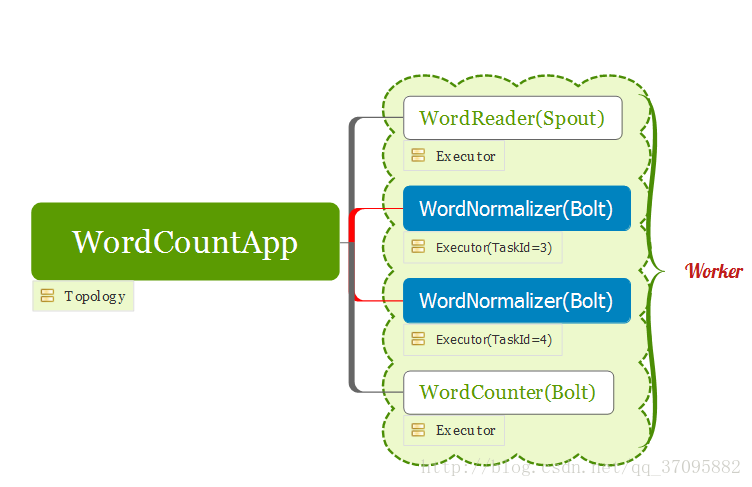
图中,用蓝色特别标记出,有2个线程分别用来执行一个WordNormalizer实例。
理论上,我们也同样可以给WordReader和WordCounter来设置并发度。但是具体问题要具体分析,在本案例,并不适合给WordReader和WordCounter设置过高的并发度。
---------------------
原文:https://blog.csdn.net/qq_37095882/article/details/77624340
Storm容错机制:
storm acker 机制
首先来看一下什么叫做记录级容错?storm允许用户在spout中发射一个新的源tuple时为其指定一个message id, 这个message id可以是任意的object对象。多个源tuple可以共用一个message id,表示这多个源 tuple对用户来说是同一个消息单元。storm中记录级容错的意思是说,storm会告知用户每一个消息单元是否在指定时间内被完全处理了。那什么叫做完全处理呢,就是该message id绑定的源tuple及由该源tuple后续生成的tuple经过了topology中每一个应该到达的bolt的处理。举个例子。在图4-1中,在spout由message 1绑定的tuple1和tuple2经过了bolt1和bolt2的处理生成两个新的tuple,并最终都流向了bolt3。当这个过程完成处理完时,称message 1被完全处理了。 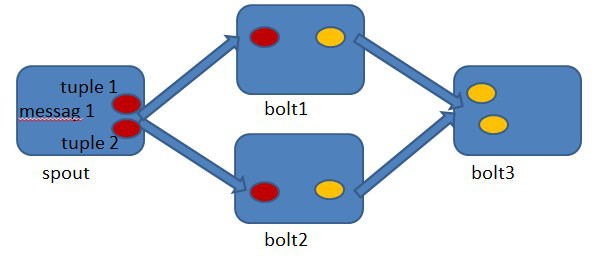
图4-1
在storm的topology中有一个系统级组件,叫做acker。这个acker的任务就是追踪从spout中流出来的每一个message id绑定的若干tuple的处理路径,如果在用户设置的最大超时时间内这些tuple没有被完全处理,那么acker就会告知spout该消息处理失败了,相反则会告知spout该消息处理成功了。在刚才的描述中,我们提到了”记录tuple的处理路径”,如果曾经尝试过这么做的同学可以仔细地思考一下这件事的复杂程度。但是storm中却是使用了一种非常巧妙的方法做到了。在说明这个方法之前,我们来复习一个数学定理。
A xor A = 0.
A xor B…xor B xor A = 0,其中每一个操作数出现且仅出现两次。
storm中使用的巧妙方法就是基于这个定理。具体过程是这样的:在spout中系统会为用户指定的message id生成一个对应的64位整数,作为一个root id。root id会传递给acker及后续的bolt作为该消息单元的唯一标识。同时无论是spout还是bolt每次新生成一个tuple的时候,都会赋予该tuple一个64位的整数的id。Spout发射完某个message id对应的源tuple之后,会告知acker自己发射的root id及生成的那些源tuple的id。而bolt呢,每次接受到一个输入tuple处理完之后,也会告知acker自己处理的输入tuple的id及新生成的那些tuple的id。Acker只需要对这些id做一个简单的异或运算,就能判断出该root id对应的消息单元是否处理完成了。下面通过一个图示来说明这个过程。 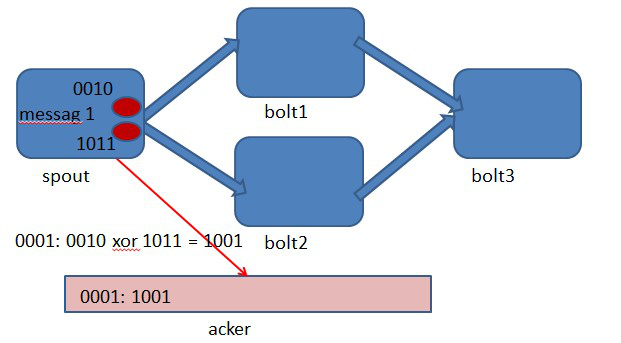
图4-2 spout中绑定message 1生成了两个源tuple,id分别是0010和1011. 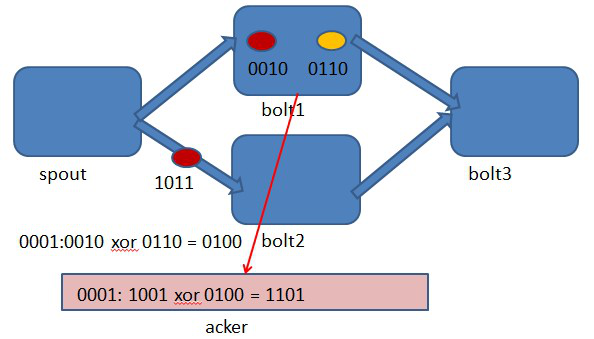
图4-3 bolt1处理tuple 0010时生成了一个新的tuple,id为0110. 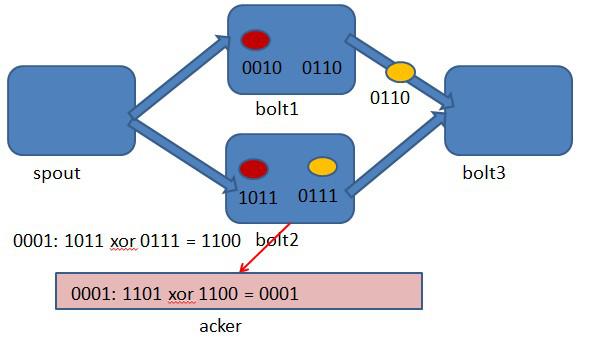
图4-4 bolt2处理tuple 1011时生成了一个新的tuple,id为0111. 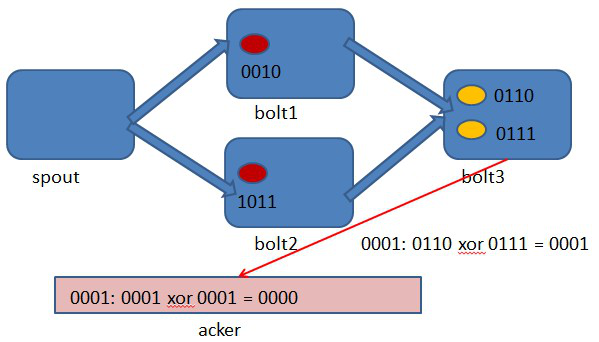
图4-5 bolt3中接收到tuple 0110和tuple 0111,没有生成新的tuple.
可能有些细心的同学会发现,容错过程存在一个可能出错的地方,那就是,如果生成的tuple id并不是完全各异的,acker可能会在消息单元完全处理完成之前就错误的计算为0。这个错误在理论上的确是存在的,但是在实际中其概率是极低极低的,完全可以忽略。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· go语言实现终端里的倒计时
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· ollama系列01:轻松3步本地部署deepseek,普通电脑可用
· 25岁的心里话
· 按钮权限的设计及实现